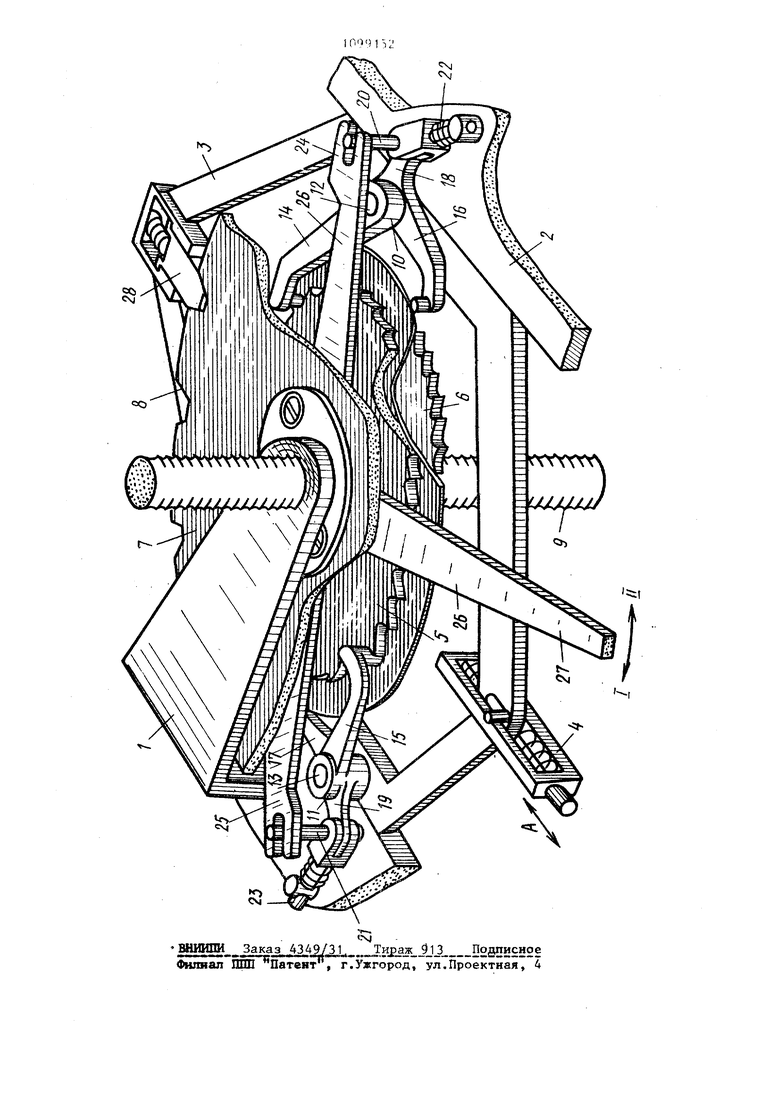
11 Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступатель ного движения во вращательное. Известен храповой механизм, содер жащий корпус, размещенный в нем вал с храповым колесом, две собачки и их привод 1 J. Недостатками известного механизма являются отсутствие возможности ре-версирования и недостаточная точност позиционирования храпового колеса. Цепь изобретен 1Я - обеспечение возможности реверсирования храпового колеса и повышение точности его позиционирования. Поставленная цель достигается тем что храповой механизм, содержапщй корпус, размещенный в нем вал с храповым колесон, две собачки и их привод, снабжен вторым храповым колесом с противоположно направленными зубья ми относительно первого и установленным соосно с ним механизмом ре-, версирования, выполненньш в виде трехплечего рычага, размещенного .на валу с возможностью взаимодействия с собачками, в корпусе выполнены нап равляютдие, а привод вьшолнен в виде поводковой рамы, размещенной в направляющих с возможностью возвратно-поступательного перемещения, собачки установлены на поводковой раме и выполнены трехплечими, два плеча которых взаимодействуют с храповыми ко лесами, а третьи подпружинены к корпусу. Кроме того, механизм снабжен диском с делительными углублениями и подпружиненным к нему фиксатором, установленным на раме. На чертеже изображен храповой механизм, общий вид. Храповой механизм содержит корпус 1, в котором выполнены направляющие 2 для поводковой рамы 3, вед-1тцее зве но в виде подпружиненной относительно рамы в обе стороны тяги 4. Через тягу 4 обеспечивается возвратно-поступательное перемещение рамы 3. Ведомая часть механизма выполнена в виде двух храповых колес 5 и 6 с про тивоположным направлением зубьев и диска 7 с делительными углублениями 8, имеющими наклон боковых стенок под углом с/, не менее 45 ° к оси углуб ления. Колеса 5 и 6 и диски 7 жестко связаны между собой и установлены на валу 9. 22 Рама 3 ведущего звена взаимодействует с ведомой частью механизма посредством двух собачек 10 и 11, шарнирно закрепленных на осях 12 и 13 рамы 3. Каждая собачка имеет три плеча. Первые плечи 14 и 15 собачек 10 и 11 вьтолнены с возможностью взаимодействия с венцом первого храпового колеса 5, вторые плечи 16 и 17 собачек находятся в зоне взаимодействия с венцами второго храпового колеса 6. Третьи плечи 18 и 19 собачек соединены посредством осей 20 и 21 с тягами 22 и 23, которые подпружинены относительно корпуса 1. Оси 20 и 21 выведены в зону взаимодействия с двумя плечами 24 и 25 трехплечего рычага 26, третье плечо которого является водилом 27. Рама 3 снабжена подпружиненным фиксатором 28, который вьшолнен с возможностью взаимодействия с углублениями 8 диска 7. Храповой механизм работает следующим образом. При движении тяги 4 начинает перемещаться поводковая рама 3 в направляющих 2 по стрелке А, фиксатор 28 начинает выходить из углубления 8 диска 7, оси 12 и 13 смещаются в сторону движения рамы, а плечо 14 собачки 10 поворачивает храповое колесо 5 против часовой стрелки. Плечо 15 второй собачки 11 при этом скользит по зубьям колеса 5 благодаря соответствующему направлению зубьев. Повороог колеса 5 осуществляется на один зуб, в конце этого движения фиксатор 28 полностью вьйдет из углубления 8 диска 7. При изменении направления движения рамы 3 в обратную сторону бен 12 и 13 собачек перемещаются в сторону движения рамы, ведущим плечом становится плечо 15, которое продолжает поворачивать храповое колесо 5 против часовой стрел.ки. Плечо 14 начинает проскальзывать относительно венца храпового колеса 5. При этом торец фиксатора 28 поджимается к поверхности диска 7 вне зоны углубления, фиксатор не препятствует развороту диска 7. Через заданное количество возвратно-поступательных перемещений рамы 3 диск 7 поворачивается в положение, при котором фиксатор 28 попадает в очередное углубление 8 диска 7. Происходит коррекция поворота диска 31 взаимного положения собачек и зубьев храпового колеса 5, так как фиксатор доворачивает делительный диск 7 в ту или иную сторону. Компенсационные пружины тяги (не обозначены) обеспечивают коррекцию положения рамы 3. Для осуществления реверса храповогЪ колеса при продолжающемся непрерывном перемещении тяги 4 поворачивают водило 27 из положения I в положение И. При этом плечи 24 и 25 рыча га воздействуют на оси 20 и 21 шарнир ных сочленений собачек 10 и 11 с тягами 22 и 23, и переводят их из одного устойчивого положения, обеспечиваемого пружинами тяг 22 и 23, в другое. Это приводит к изменению положения плечей собачек. Плечи 14 и 15 выходят из зацепления с колесом 5, а плечи 16 и 17 собачек входят в зацепление с зубьями колеса 6, наклон которых противоположен наклону ,зубьев колеса 5. При возвратно-посту пательном движении рамы 3 колесо 6, 24 а с ним колесо 5 и диск 7, вращаются в противоположную сторон-у. Таким образом храповой механизм обеспечивает преобразование возвратно-поступательного движения рамы 3 в прерывисто-вращательное в обе стороны колес 5 и 6 и диска 7, Храповой механизм имеет простую конструкцию и простые связи между элементами. Конструкция позволяет автоматизировать управление ее движением. Благодаря взаимодействию фиксатора 28 рамы 3 ведущего звена с углублениями 8 в диске 7 ведомого звена осуществляется коррекция положения храповых колес 5 и 6 с частотой, соответствующей количеству углублений диска 7. Храповой механизм обладает повышенными технологическими возможностями, более точным позиционированием и может быт-ь использовано в различных автоматах для обеспечения перемещения инструмента или рабочего тела.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Устройство для обработки периодически повторяющихся участков с фасонной поверхностью на деталях типа тела вращения | 1976 |
|
SU657973A1 |
| Храповой механизм для преобразования возвратно-поступательного движения в прерывистое вращательное | 1977 |
|
SU682707A1 |
| Храповой механизм для преобразования возвратно-поступательного движения в прерывистое вращательное | 1975 |
|
SU526739A1 |
| Храповой механизм | 1986 |
|
SU1404713A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 2005 |
|
RU2294276C1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2013 |
|
RU2548870C2 |
| Зубообрабатывающий станок для изготовления крупномодульных колес внутреннего зацепления | 1983 |
|
SU1151389A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
1. ХРАПОВОЙ МЕХАНИЗМ, содержащий корпус, размещенный в нем вал с храповым колесом, две собачки и их привод, отличающи. йс я тем, что, с целью обеспечения реверсирования, он снабжен вторым храповым колесом с противоположно направленными зубьями относительно первого и установленным соосно с ним механизмом реверсирования, выполненным в виде трехплечего рычага, размещенного на валу с возможностью взаимодействия с собачками, в корпусе выполнены направляющие, а привод выполнен в виде поводковой рамы, размещенной в направляющих с возможностью возвратно-поступательного перемещения, собачки установлены на поводковой раме и выполнены трехплечими, два плеча которых взаимодействуют с храповыми колесами, а третьи подпружинены к корпусу. 2. Механизм поп. 1, отличающийся тем, что, с целью Q повышения точности позиционирования, он снабжен диском с делительными (Л углублениями и подпружиненным к нему фиксатором, установленным на раме.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кожевников С.Н | |||
| и др | |||
| Механизмы | |||
| Справочное пособие | |||
| М., Машиностроение, 1976, с | |||
| Корнерез для пней | 1921 |
|
SU448A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
