(21)4179141/25-28; 4157787/25-2S
(22)01.12.86
(46) 23.06.88. Бюл. № 23
(71)Львовский политехнический институт им. Ленинского комсомола
(72)Л. И. Боженко и Н. Л. Кукляк
(53)621.838.1(088.8)
(56)Авторское свидетельство СССР № 1099152, кл. F 16 Н 27/04, 1983.
Авторское свидетельство СССР № 868205, кл. F 16 Н 29/00, 1980.
(54)ХРАПОВОЙ МЕХАНИЗМ
(57)Изобретение относится к общему машиностроению, а именно к механизмам для преобразования возвратно- поступательного движения во вращательное. Цель изобретения - расширение кинематических возможностей механизма путем обеспечения реверсирования ведомого вала и повышения точности его позиционирования. Реверсирование ведомого вала 2 осуществляется с помощью одного из специальных профилированных зубьев храпового колеса 6 или 7, перекидьшающих собачку 18 или 19 из рабочего положения в холостое, при этом собачка, бьшшая в рабочем положении, переходит в холостое, а другая собачка из холостого положения переходит в рабочее. Переключать собачку 18 или 19 можно и переключателем, который, кроме этого, еще и обеспечивает постоянный контакт собачки 18 или 19 с зубьями храпового колеса 6 и 7 с помощью кулачка. Повышение точности позиционирования ведомого вала 2 обеспечивается за счет взаимодействия фиксирующих собачек с зубьями храпового колеса 13. Собачки роликами взаимодействуют с кулачком 15, при сходе роликов с кулачка 15 собачки взаимодействуют с зубьями храпового колеса 13, осуществляя его строгое позиционирование. 2-з.п. ф-лы, 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2310786C1 |
| Храповой механизм | 1983 |
|
SU1099152A1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2321787C1 |
| Устройство для подачи материала в зону обработки | 1988 |
|
SU1625559A1 |
| Автоматический привод | 1990 |
|
SU1772493A1 |
| Основный регулятор ткацкого станка | 1983 |
|
SU1152984A1 |
| Механизм поворота распределительного барабана круглочулочного автомата | 1977 |
|
SU659666A1 |

Изобретение относится к общему машиностроению, а именно к механиз- мам для преобразования возвратно-поступательного движения во вращатель- ное,
Цель изобретения - расширение кинематических возможностей механизма путем обеспечения реверсирования ведомого вала и повышение точности его позиционирования.
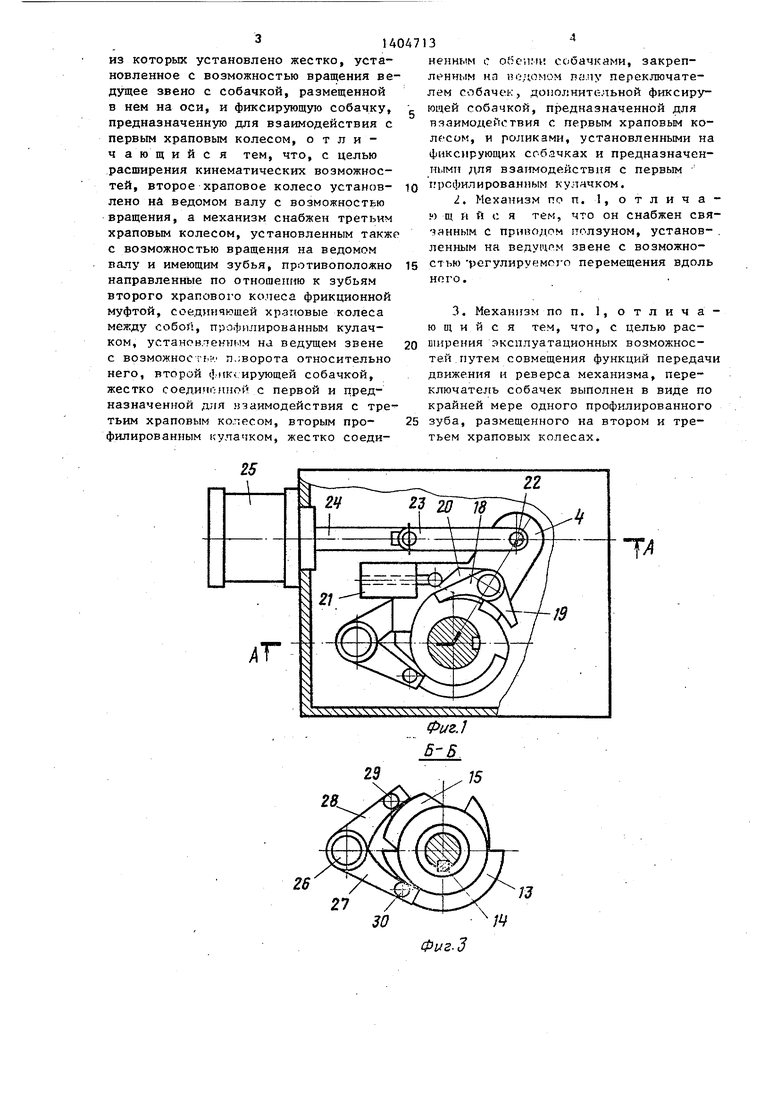
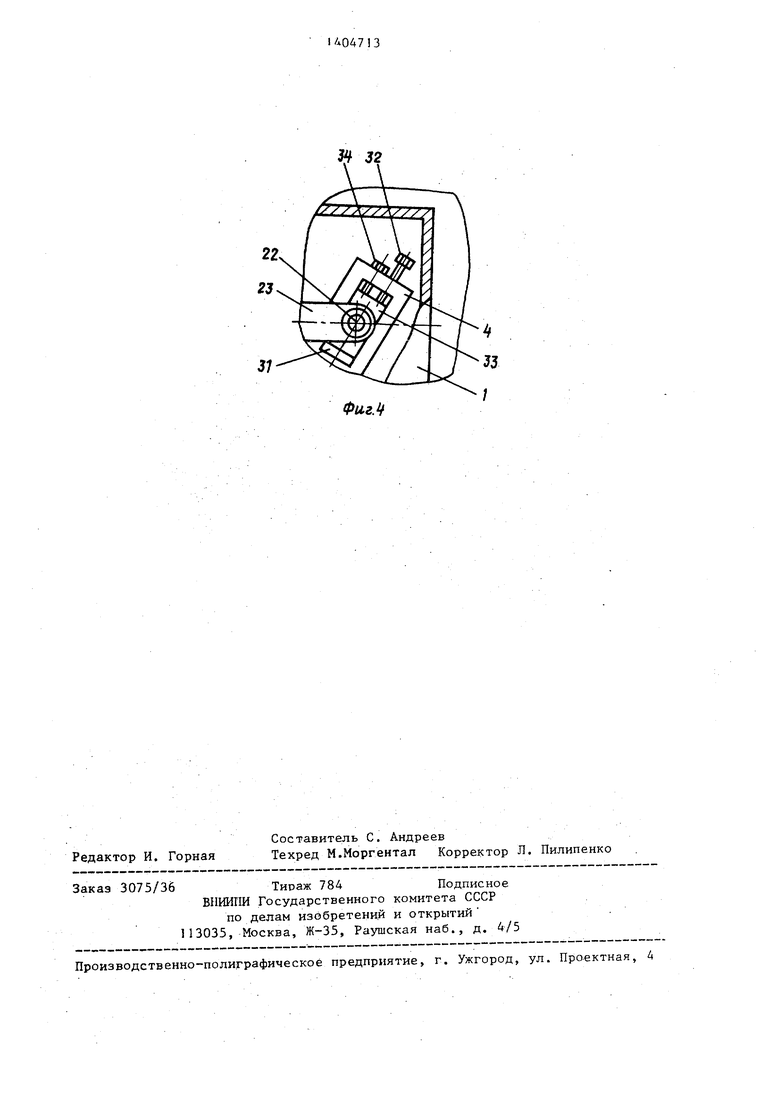
На фиг. 1 изображен храповой механизм, вид сверху; на фцг. 2 - разрез А-А на фиг, I; на фиг, 3 - разрез Б-Б на фиг, 2; на фиг, 4 - вариант выполнения соединения ведущего звена с приводом, обеспечивающий ре упи- рование угла поворота ведущего арена
Храповой механизм содержит ко -пус 1, внутри которого размещен ведомьш вал 2, установленный в подшипниках 3 качения. На ведомом валу 2 размещены ведущее звено 4, установленное с помощью подшипников 5 качения, храповые колеса 6 и 7, фрикционная муфта 8, состоящая из фрикционных шайб 9, пружинных шайб 10, гайки 11 и контргайки 12, храповое колесо 13, установленное на валу с помощью шпонки 14, На ведущем звене 4 установлены. кулачок 15, ось 16, на которой с помощью шпонки 17 установлены собачки 18 и 19 и кулачок 20 (собачка 19 и кулачок 20 выполнены как единое целое) , переключатель 21 и ось 22, соединяющая ведущее звено 4 посредством рычага 23 со штоком.24 привода 25, На неподвижной оси 26, закрепленной на корпусе 1, свободно установлены две фиксирзтощие собачки 27 и 28 с роликами 29 и.30, которые могут свободно вращаться, обкатьшаясь по кулачку 15.
Для плавного регулирования угла поворота ведущего звена 4 в нем вы- полнен паз 31, в котором с помощью регулировочного винта 32 перемещается ползун 33, Ось 22, соединяющая ведущее звено 4с рычагом 23, при зтом крепится на ползуне 33,
Для исключения смещения ползуна 38 в процессе работы регулировочный винт 32 контрится винтом 34,
Храповой механизм работает следую щим образом.
Возвратно-поступательное движение ведущему звену 4 передается от привода 25 (например, от гидроцилиндра) через его шток 24, рычаг 23 и ось
5 0
5
0
5
Переключатель 21 с помощью кулачка 20 удерживает в зацеплении с храповым колесом только одну из собачек 18 или 19. Таким образом, движение (прерьшисто-вращательное) передается от ведущего звена 4 через одно из, храповых колес 6 или 7 и фрикционную муфту 8 ведомому валу 2. С целью обеспечения высокой точности углов поворота ведомого вала 2 жестко установленное храповое колесо 13 со специальными выступами (не показаны) контактирует с собачками 27 и 28, Управление движением последних осуществляется с помощью кулачка 15,
роликов 29 и 30. I
Вращение вала 2 в одном направлении осуществляется до тех пор, пока храповое колесо 13 не входит в соприкосновение с соответствующей собачкой 27 или 28, Храповое колесо 6 или 7 при этом продолжает движение на валу 2 благодаря фрикционной муфте 8 ,. Изменение направления вращения вала 2 осуществляется с помощью одного из специальных профилированных зубьев (не показаны) храпового колеса 6 или 7, перекидьшающего собачку
18или 19 из рабочего положения в холостое. Переключить собачку 18 или
19мо кно и переключателем 21, кото-- рый, кроме этого, обеспечивает постоянный контакт собачки 18 или 19 с зубьями храпового колеса 6 или 7 с помов1ью кулачка 20.
Таким образом, возвратно-поступательное движение привода 25 преобразуется в прерывистое вращательное движение ведомого вала 2 в обе стороны с заданным количеством циклов в одном и обратном направлениях в зависимости от количества зубьев на храповых колесах 6 и 7 и положения на них зуба со специальным профилем (не показан),
Формула изобретения
26
27
/J
Фиг-З
J2
Фи,г.
