(54) ПНЕВМАТИЧЕСКОЕ У ПРАВ Л ЯЮи,ЕЕ УСТРОЙСТВО
мам, а выход блока преобразования аншюговых сиг}1шгов в дискрет} ые соединен с OJLOKOM отображения технологической ситуации.
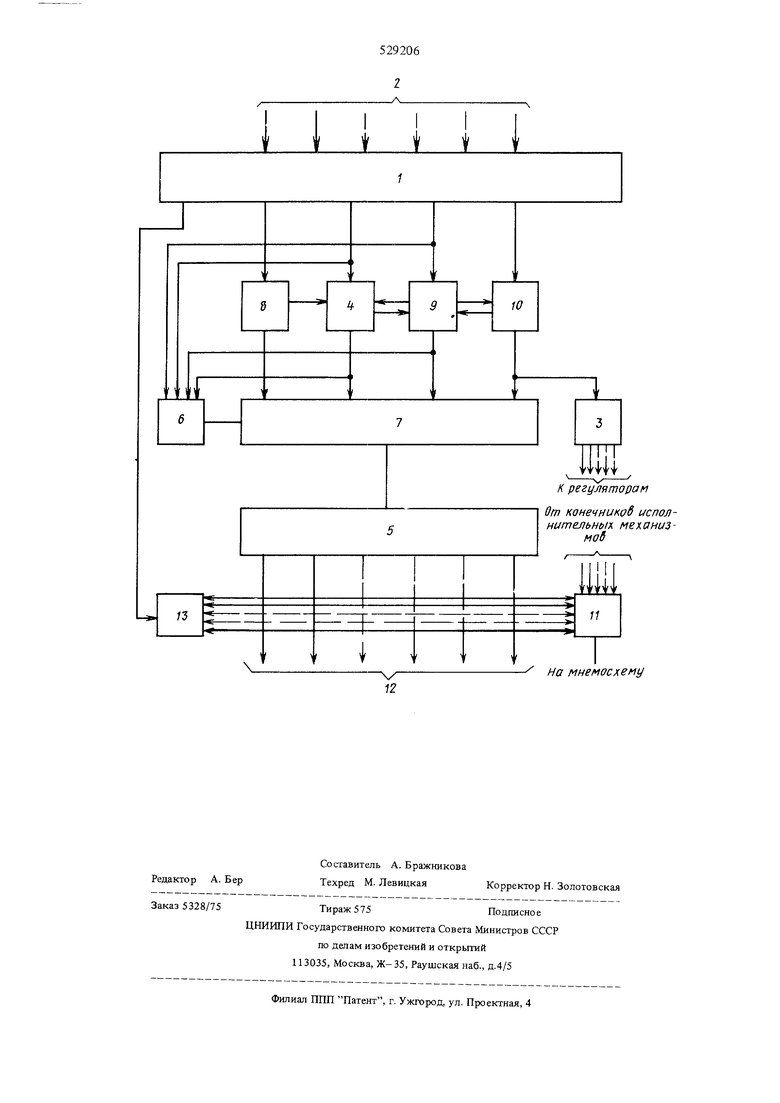
На чертеже к-дабражена блок-схема пневматического управляющего усгройс -ву jjui упзоцессин приготовления микробиологических сред.
Устройство содержит блок :фсо6ргзоБа;1пя aiiajioroBbix сигналов в ; лскретные, свкзаипмй с датчиками (на чертеже не доказамь) по стрелкам .:, блоки 3, 4 и 5 управления рсгуля . ДлЗирС;вания исходных компонентов и усилителя мо;.дности, блок 6 импульсных ре1 уляторов, б.чок / ;щста ционного унравления. взаимосв:-1зань:ые GJIOICH о. 9, и 10 управ.чеиия сборниками KOMiioHCsirois питательных сред, приготовление.м кондезггратов питательных сред и разбавлением к-и-центратоз и блок 11 преобразования и)1енма(ическ х сиггкьи): н электрические.
Блоки 8, 9 и 10 к GjioK J- ;1озирования исход; ых компонентов соединены с блоко.м 1 гп еобразования аналоговых сиг}1алов в .шскретные и 6.(}iv: ;1Лста1щиоиного управ.пения.
Выход б.юка 7 .длсганционного уирав.тол.ни .;ерез блок 5 усшштедя мощности лодкдшчс;; к иснолнительпым механизмам (на .:сртеже дс доказаны) по стрелкам 12.
Выход блока 1 преооразовадия аиадогсвых сигналов в дискретные соединем с блоком 13 оюбражешя технологической ситуации.
Устройство работает с к:дуд-ищим об 1мзом, На вход б.юка 1 преобразования ана.;о.говь,х сигналов в дискретные ностудают адало -овь е сигналы от датчиков по стрелкам 2, измеряющих количественные и качественные показате.чк управляемого пронесса. BJIOK 1 осуадсств.пяет nopoiOBoe преобразование этих сигналов з .двоичные дискретные пневматические сигналы., 1 отор:пе riociyiuiioT на входы блока 6 импульснь х регуляторов и блоки 8. 4. 9 и 10 унравления сборниками комггоненгов питательных сред, дозироианке,м колп.оиентов, ipi-iготовлением кондеитратон иита1с:;г;ных соед и разбавлением последних. В зависимости от сочетания и последовательности воздействия этих си ;алов формируются сигналы взаимосвязи между блоками 8, 4, 9 и 10, а вь ходные CHiTiajibj этих блоков поступают на блок 7 дистащионгюго уиравлен.ия.
Блок 8 управления сборниками ко.миоиОТон питательных сред при опорожнении сборников форрушрует сигналы на их наполнение, поступающие ь блок 7 дистанционного управления, и скгнап;, готовности к разгрузке, указываюл;;-1е на лали-що в сборниках компонентов, которые поступают в б.юк 4 управления дозировавшем компоне ;тов. При :;том если сборники компонентов питательных сред гото вы к разгрузке и в дозаторах отсзтствуют соответствующие комионентьг, то блок 4 у15равления дозировавшем последних отрабатывает си.гнас5ы на aoiroTO-iку доз соответствуюгцих компонентов, постугйюuifie в блок 7 гшстандионного управлеи.ия.
-t- ... .,.,...: ,; л -. : -:; .1 -, .,: ; Л:.; J с i i.)p С ii {С 1 ;.Ич
V;lniRJie |/;-1Я ЦС rJO; va- Uv: : , : ;r-t . м - ...
-ч - -- - -,- f .....v-- --.-i.- :.:I.,..; ; ,jьлнюсти ;ч;м:,торо:, к (1:ор;.-ли;:;;икк которые -юступаю Е 5;:ок 9 удравлсжя пвг-гоговлснием .;оине гграта : ii:-brc.iibHo;i сридь;. В cawae j ОТОБНОСТЧ какого ;::;ск: из параллельно работающих пп ара:оз fna схс:ое не иоказаль;; , служащих ;д1я |;рЯ: ото},пенКл KOJiiieHTparoB пи1;;тип,чых сге к заг-узке блок О упранлеккн :р-с,тозлен«цм концситраюн форкирус; си;н;иы на ::и:-ру:ису соответс:пуюше -о aiiirapara, лоступэюгди. и б.юк 7, и сигналы запроса зга раз -рузку дозатар;-;;;. поступав .iHc в олок 4 у;|равле:гия дозаторами, кочорый 4 ормируст сигналы яй разгрузке лозатопов, nocTvпиюпже также в блок 7 ;кс;-а1 Д1;ои);ого -/правления.
г- ,.M..;O г. ;;;г:1;фаши
iui чертеже де ;:oKiria ib:K слу:.1С-:г;-х xa;. ра пайлеiiHH ондентрата гктатсльной среды. , ;0 управления разбав.тениел: ко1 цегггэагов пи ательмйх срец (формирует сигнал ги-говпосги его, ;.:;вг:;;щего asUiapyia к агр}5к:г 1Сч, iyiiafcUv ; ; бг;;;-. v ;, iUjaiiсред. л:слн ;(;игого депг ;и1;да;г-Г;С кс. ичест.с1; конденграта гап-атсльн й с;я;дь: ЗсДйн; ;:;;, я;.:чсС)яа, то последний формир е1 cyDiajjrji на raJiOxriKv ;1к ательнон сре;;.ьг. поступающие : г.гж ,,г,Г алцшд пого управления. ; с.гяа. :;аис ч:; jia га iiiJvjKy 2Т1;а1оата. служащем: ддя I-j J6abr- i:i0i ;чоги;лг; j-j;;, а. иосгупаюишй в Оло:-.: ; ij viipyrjicr/iM ;;,i36ai.i.r(: i;ieM tvOMiic;;ciif03. когорьп; форг ::-;р г-; ..г; га.; :;« ;а. гузку указанного ьгяарам, iu - r..:.r,i. Г: ;, Ятк дис аппионно1о уиравле1ло:.
В авгоматическом оеж;;ме p:,.j.;4.i ги).ь ;ia выходе 6jiOKa 7 дис апцьглтиого угр;;п.сг,;н nouiOряигг сигналы, 1юсгупаю;цке от Ojiircr,; ;-. . Ч. iOn 6, а в дистаппиоинс;;,; гг; гаг., г (-ггало ; дксгад1;ионно;о у1 пгв11сНкЯ.
(.ИГНаЛЬ с i;b),ra бл-г;;г .ЧГ;Г:.
упрппленкк лостугашт г:,.-- v сигиг,:л;-;. л;ощiocvii }1н )- СГ ОЛ :итель;:ь е .i;;-rrrir Г; ,.;:ги.КС 2, а также да входы б.к;ка 3 оюбражегия .ехюлогкчуской С;- туадии и блока 1 I ijpco6paj(;jiar-K ; lij eBматических cHiiiajioB к ,;лолтри1есг:ке. Е згздсимости от этих сигналов н сигналов, Юстудающих с (jjioica i лреобпазования а1г;1логовьгх сиг){алов. блок 13 отображения чехпологигеской сктуапии Доомнр е символ 1;чес.кие образы тсхно;;огической сит аUidJ-i; I.e. работу, на;: ример. технологических ниток j pKT-oTOB. ийТйте.:тьных сред, дня ферментаторов или iioceBKirx ап ;аратов или техпо югические ситуа: ии ;ю каж;гс1-,-;у апнарвту в oтдeJiьнocти об одерадиях Ш к/лкенйя. опорожнения, достижения за; адио1 о KSiCcnsa ii с(дгичества.
fijroK J 1 преобразования лиев магических сигналов в элек7-рнческис осуществляе преобразование входльХ сигналов и форл крует сигнгшъ;, оповещающие iia мнемосхеме о неисмравиостях кспол ш1ель} Ь х мйханизмо)з с указанием места неиспиавnociii- путем /югическо-о сравнения сигналов от
блока 7 даставдионного управления с сигналами от конечных выключателей, установленных на исполнительных механизмах.
Сигналы с выхода блока 10 управления разбавлеггаем концентратов питательных сред поступают также на блок 3 управления регуляторами, который формирует сигналы включения аналоговых регуляторов и сигналы задания.
Предлагаемое пневматическое управляющее устройство позволит по сравнению с известным повысить качество приготавливаемых сред и увеличить тем самым производительность процесса получения микробиологических препаратов ориентировочно на 2,5%, что из расчета на производство, например энтобактерина 5 тыс. т/год составит экономический эффект 183 тыс. руб/год.
Формула изобретения
Пневматическое управляющее устройство, например, для управления процессом приготовления питательных сред, содержащее блок преобразования аналоговых сигналов в дискретные, связанный с датчиками, блоки управления регуляторами, дозирования исходных компонентов и усилителя мощности, отличающееся тем, что, с целью повьппения качества приготовляемых сред и увеличения производительности процесса получения микg робиологических препаратов, оно снабжено блоком отображения технологической ситуации, блоками иглпульсных регуляторов, блоком дистанционного атравления и взаимосвязанными блоками управления сборниками компонентов питательных сред, приготовлением концентратов питательных сред и разбавлением концентратов, при этом последние и блок дозирования исходных компонентов соединены с блоком преобразования аналоговьос сигналов а дискретные и блоком дистанционного управления, выход которого через блок усилителя мощности подключен к исполнительным механизмам, а выход блока преобразования аналоговых сигналов в дискретные соединен с блоком отображения технологической ситуации.
„Источники информации, принятые во внимание
при экспертизе:
1.Авторское свидетельство СССР N 329507 М. КЛ.2 G 05В 11/44.
2.Авторское свидетельство СССР № 287432,
„ М.кл. G 05В 11/44 (прототип).
i if 
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое управляющее устройство | 1983 |
|
SU1101789A1 |
| Система дистанционного управления главной судовой дизельной установкой | 1982 |
|
SU1063709A1 |
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИПРОЦЕССАМИ | 1965 |
|
SU167690A1 |
| Устройство для параллельной обработки трехмерных сцен | 1988 |
|
SU1612307A2 |
| Устройство для регулирования режима трансформатора связи | 1986 |
|
SU1415322A1 |
| Устройство для управления подачей шлифовального станка | 1974 |
|
SU532082A1 |
| Устройство для очистки трубопроводов | 1984 |
|
SU1233967A1 |
| Устройство для обучения крановщика | 1977 |
|
SU653621A1 |
| Способ дистанционной синхронизации сейсмического вибратора и сейсмостанции и устройство для его осуществления | 1981 |
|
SU1323990A1 |
| Устройство для управления исполни-ТЕльНыМи МЕХАНизМАМи | 1979 |
|
SU811217A1 |
От конечникоё не полнительны}( механизмов
/3
V
На мнемосхему
