оо оь
СП
Од
iNd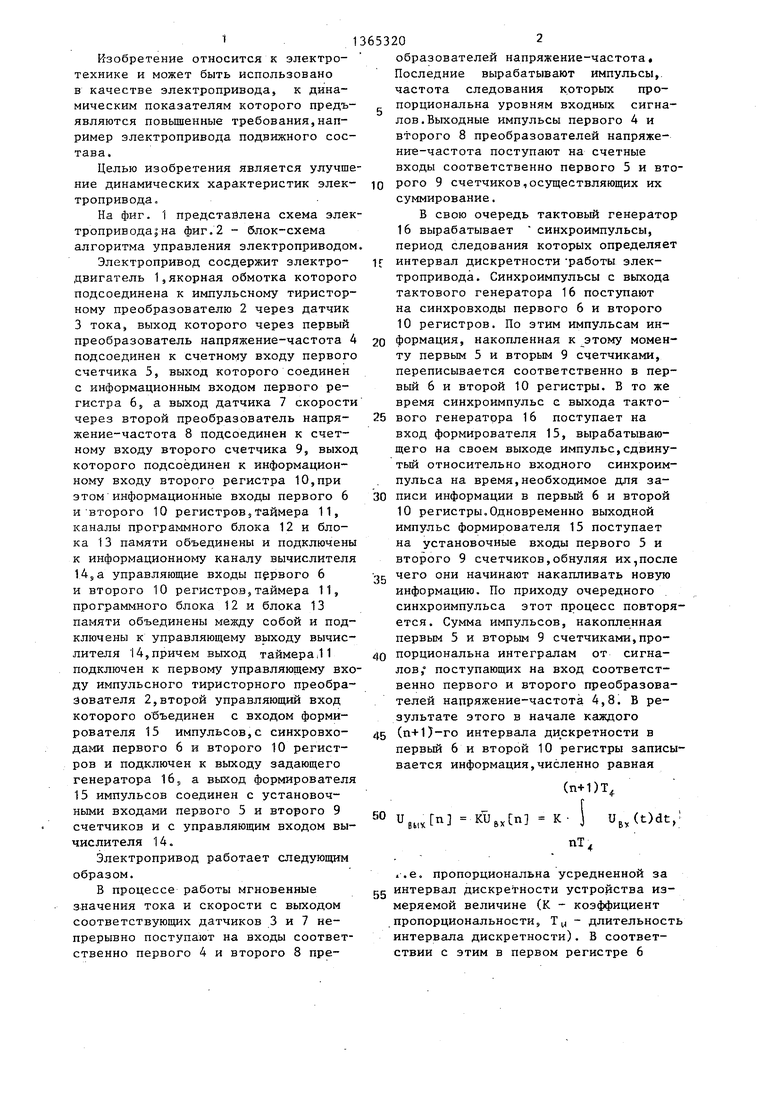
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Цифровое устройство для фазовогоупРАВлЕНия МНОгОфАзНыМ ТиРиСТОРНыМпРЕОбРАзОВАТЕлЕМ | 1979 |
|
SU843147A1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
Изобретение относится к электротехнике и может быть использовано в устройствах управления электродвигателями подвижного состава. Улучшение динамических характеристик электропривода обеспечивается за счет введения датчика 7 скорости, двух преобразователей 4 и 8 напряжение-частота, второго счетчика 9, второго регистра 10, причем выход датчика 3 тока через первый преобразователь 4 напряжение-частота подсоединен к счетному входу первого счетчика 5, а выход датчика 7 скорости через второй преобразователь 8 напряжение-частота подсоединен к счетному входу второго счетчика 9. Данное устройство позволяет регулировать усредненные за постоянный интервал дискретности скорость электродвигателя и ток якорной цепи. 2 ил. с i КЛ с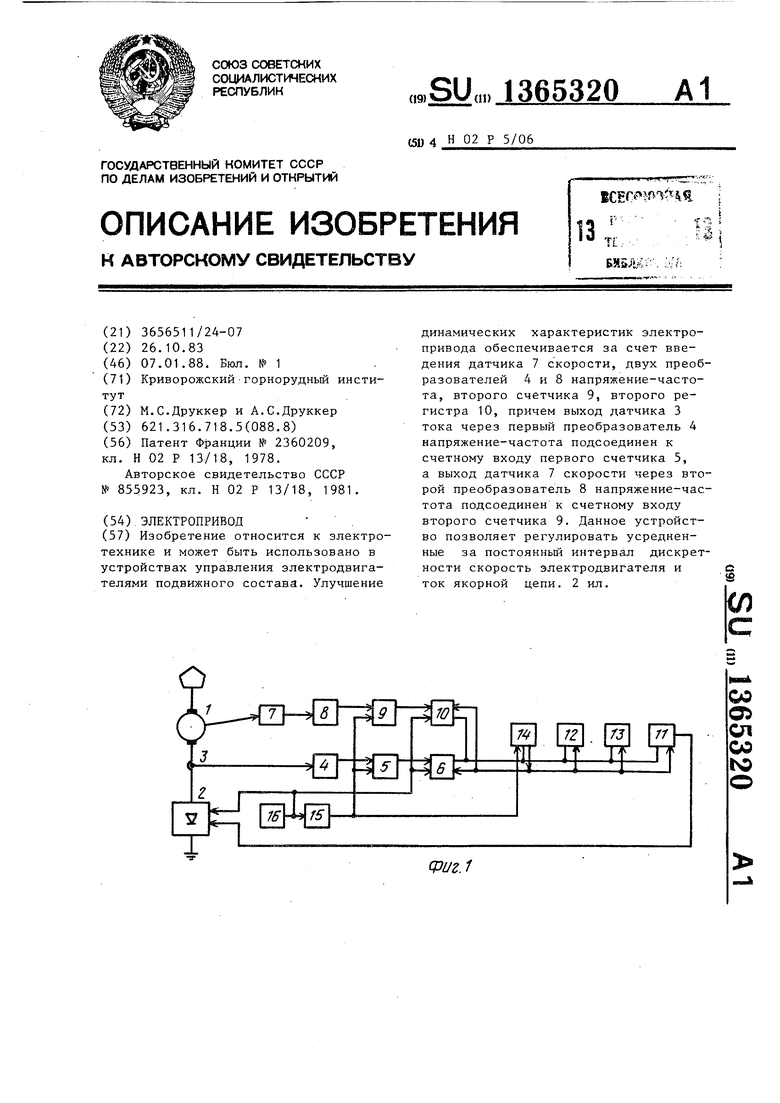
.f
1 1
К-зобретение относится к электротехнике и может быть использовано в качестве электропривода, к динамическим показателям которого предъявляются повышенные требования,например электропривода подвижного состава.
Целью изобретения является улучшение динамических характеристик электропривода.
На фиг. 1 представлена схема электропривода; на фиг,2 - блок-схема алгоритма управления электроприводом
Электропривод сосдержит электродвигатель 1,якорная обмотка которого подсоединена к импульсному тиристор- ному преобразователю 2 через датчик 3 тока, выход которого через первый преобразователь напряжение-частота 4 подсоединен к счетному входу первого счетчика 5, выход которого соединен с информационным входом первого регистра 6, а выход датчика 7 скорости через второй преобразователь напряжение-частота 8 подсоединен к счетному входу второго счетчика 9, выход которого подсоединен к информационному входу второго регистра 10,при этом информационные входы первого 6 и второго 10 регистров5 таймера 11, каналы программного блока 12 и блока 13 памяти объединены и подключены к информационному каналу вычислителя 14,а управляющие входы первого 6 и второго 10 регистров,таймера 11, программного блока 12 и блока 13 памяти объединены между собой и подключены к управляющему вьгходу вычислителя 14,причем выход таймера|11 подключен к первому управляющему входу импульсного тиристорного преобразователя 2,второй управляющий вход которого объединен с входом формирователя 15 импульсов,с синхровхо- дами первого 6 и второго 10 регистров и подключен к выходу задающего генератора 16, а выход формирователя 15 импульсов соединен с установочными входами первого 5 и второго 9 счетчиков и с управляющим входом вычислителя 14,
Электропривод работает следующим образом.
В процессе работы мгновенные значения тока и скорости с выходом соответствующих датчиков 3 и 7 непрерывно поступают на входы соответственно первого 4 и второго 8 пре653202
образователей напряжение-частота. Последние вырабатывают импульсы,, частота следования которых пропорциональна уровням входных сигналов. Выходные импульсы первого 4 и второго 8 преобразователей напряжение-частота поступают на счетные входы соответственно первого 5 и вто10 рого 9 счетчиков,осзтцествляющих их суммирование.
В свою очередь тактовый генератор 16 вырабатывает синхроимпульсы, период следования которых определяет
If интервал дискретности -работы электропривода. Синхроимпульсы с вьтода тактового генератора 16 поступают на синхровходы первого 6 и второго 10 регистров. По этим импульсам ин20 формация, накопленная к этому моменту первым 5 и вторым 9 счетчиками, переписывается соответственно в первый 6 и второй 10 регистры. В то же время синхроимпульс с выхода такто25 вого генератора 16 поступает на вход формирователя 15, вырабатывающего на своем выходе импульс,сдвину- тьш относительно входного синхроимпульса на время,необходимое для за30 писи информации в первый 6 и второй 10 регистры.Одновременно выходной импульс формирователя 15 поступает на установочные входы первого 5 и второго 9 счетчиков,обнуляя их,после
-jg чего они начинают накапливать новую информацию. По приходу очередного синхроимпульса этот процесс повторяется. Сумма импульсов, накопленная первым 5 и вторым 9 счетчиками,прог|о порциональна интегралам от сигналов, поступающих на вход соответственно первого и второго преобразователей напряжение-частота 4,8. В результате этого в начале каждого
45 (п+1)-го интервала дискретности в
первый 6 и второй 10 регистры записывается информация,численно равная
(п-И)Т
° Ки.Дп К- ) U,,(t)dt,
пТ,
..е. пропорциональна усредненной за -С интервал дискретности устройства измеряемой величине (К - коэффициент пропорциональности, Т - длительность интервала дискретности). В соответствии с этим в первом регистре 6
хранится информация, пропорциональна усредненному току двигателя 1 - itn а во втором регистре 10 - усредненный скорости вращения ы п на истекшем п-м интервале дискретности.
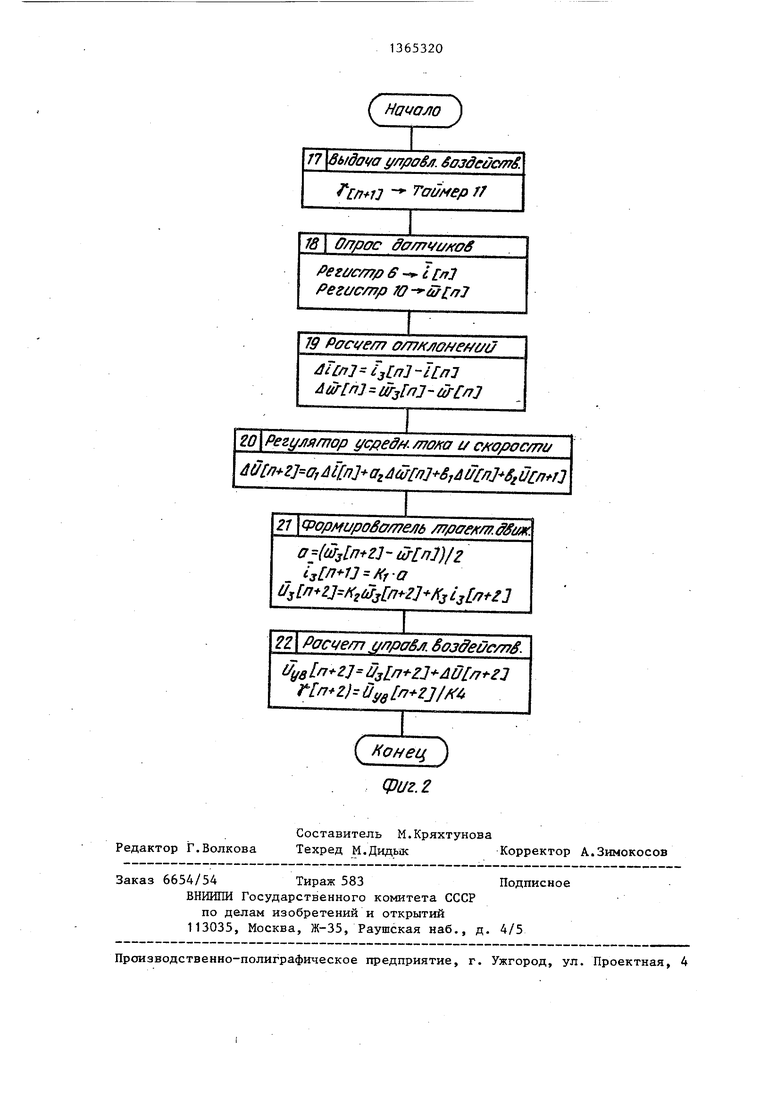
Выходной импульс формирователя 15 поступает также на управляющий вход вычислителя 14 и запускает ее, после чего она начинает выполнять программу управления тиристорным электроприводом. Алгоритм управления электроприводом приведен на фиг. 2.
Программа состоит из шести основ- - ных программных блоков. 17-22 - под- программ,в частности: вьщачи управ- ,ляющего воздействия (блок 17), опроса датчиков (блок .18); расчеты отклонений (блок 19); регулятора усредненного тока и скорости (блок 20); формирователя траектории движения (блок 21);расчета управляющих воздействий (блок 22).
При выполнении подпрограммы выдач управляющего воздействия вычисли- тель 14 записывает в таймер 11 значение управляющего воздействия , опредеденное на прошлом интервале, и запускает его. Отсчитав необходимое время,таймер 11 выдает управляющий импульс, который,поступая на первый управляющий вход импульсного тиристорного преобразователя, реализует необходимую скваж- ность -vtn+l , заданную системой управления.
Вычислитель 14 выполняет подпрограмму опроса датчиков,в которой она вырабатывает управляющие сигналы,поступающие на управляющие входы первого 6 и второго 10 регистров и посредством которых осуществляется считывание хранящейся в них информации, а именно усредненного тока i п и ско- рости вращения на истекшем п-м интервале дискретности.
После этого вычислитель 14 выполняет подпрограмму расчета отклонений, определяя отклонения между заданными управляемыми координатами электродвигателя 1 - усредненными током и скоростью и их реальными координатами на истекшем п-м интер- вале дискретности
ui fn . - i n I dU) n - .
Отклонения, определяемые вырг1же- нием (1),являются исходной информая,
IQ is 20и25 ЗО , „
. .
45
50
55
цией для подпрограммы регулятора усредненного тока и скорости,выполняя которую вычислитель 14 рассчиты- вает корректирующие добавки к заданию на напряжение электродвигателя 1 на (п+2)-м интервале дискретности, которое обеспечит выход управляемых координат электродвигателя 1 на заданную траекторию движения. Вычислительный алгоритм, реализуемый подпрограммой регулятора, определяется следующим выражением:
а,1 Сп + + + Ь, ли nj + bj 4U tn+1j, (2)
где :JU CnJ, /)U n+lj - значения корректирующихдобавок на предыдущих интервалах дискретности;
а.,, а , Ь , bj -.коэффициенты
настройки регулятора.
В дальнейшем вычислитель 14 реализует подпрограмму формирователя траектории движения, вырабатывая траекторию движения управляемых координат, характеризуемую необходимым ускорением, а значит и моментом, развиваемым электродвигателем 1
а ( Ыз n+2j- )/2; io, Гп+1 К,, а ; и,. п+2 K2U iCn+21+ ,
(3)
где К., - Kj - постоянные коэффициенты.
Следует отметить,что желаемая траектория скорости - WjC хранится в блоке 13 памяти.
Завершая выполнение управляющей программы на интервале дискретности, вычислитель 14 выполняет подпрограм- му расчета управляющих воздействий,в которой определяется скважность напряжения импульсного тиристорного преобразователя 2 - tn+2}, необходимая для отработки желаемой траектории движения
й,, изГп+2 + -зи n+2j; З-Гп+2 U gtn+21/К, (4)
где К 4 - постоянный коэффициент}
После вычисления управляющего воздействия п-н2 вычислитель 14 останавливается. По приходу очередного импульса с выхода формирователя 15 импульсов на управляющий вход вычислителя 14 последняя запускается и ее работа повторяется в рассмотренной последовательности.
Формула изобретения
Электропривод,содержащий электро- двигатель постоянного тока, якорная обмотка которого подключена к импульсному тиристорному преобразователю через датчик тока,связанный выходом со счетным входом первого счетчика, выход которого через первый регистр подсоединен к информационному входу вычислителя, связанного с импульсным тиристорным преобразователем, тактирующий генератор, формирователь им- пульсов, отличающийся тем,что,с целью улучшения динамических показателей,в него дополнительно введены программный блок, блок памя- ти, таймер,вторые счетчик и регистр, датчик скорости и два преобразователя напряжение-частота, причем выход датчика тока через первый преобразователь напряжение-частота подсоединен к счетному входу первого счетчика,
выход которого соединен с информационным входом первого регистра, а выход датчика скорости через второй преобразователь напряжение-частота подсоединен к счетному входу второго с 1етчика, выход которого подсоединен к информационному входу второго регистра, при этом другие информационные входы первого и второго регистров, информационный вход таймера,входы программного блока и блока памяти объединены и подключены к информационному входу вычислителя,а управляющие входы первого и второго регистров, таймера, программного блока и блока памяти объединены между собой и подключены к управляющему выходу вычислителя, выход таймера подключен к первому управляющему входу импульсного тиристорного преобразователя, второй управляющий вход которого объединен с входом фррмирователя импульсов, с синхровходами первого и второго регистров и подключен к выходу тактирующего генератора, а выход формирователя импульсов соединен с установочными входами первого и второго счетчиков и с управляющим входом вычислителя.
17
выдоха 1//троёл. Sojdct/c/nS.
п-и - //
18 ОЛрОС &(7/77Vf//fOS
fleie/c/77/i} ff Peei/c/Tjp
79 PoCt/e/77 ff/77 Gf/ef/ /f}
TcnJ-ijLfjl-iLnl агСл
201 Регдлагпор /77O/fa и c/fOpoc/77i/ AUi:n -2 ajM n -i-az uf n Sj i/i:n - SiUCni-n
21 YPopf upoScf/}7e/f6 /77pffe/ /ff..
ff;(itfзin гJ )lz г-о
3f 2j /f2 j f7i-2}- /(ji3 /7i /
2Z Pocvem j/i7pc7Sji. eojffeuc/Tj.
l7yB lf3l/7i-Zj - fff/7i- J иуд f7+2J/f(
С На )
} фиг. 2
| СТРЕЛКОВЫЙ ТИР | 2007 |
|
RU2360209C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления тиристорным импульсным регулятором электроподвижного состава | 1979 |
|
SU855923A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
