Изобретение относится к электротехнике и может быть использовано в электроприводе постоянного тока.
Целью изобретения является повышение качественных показателей электропривода в области низких частот вращения.
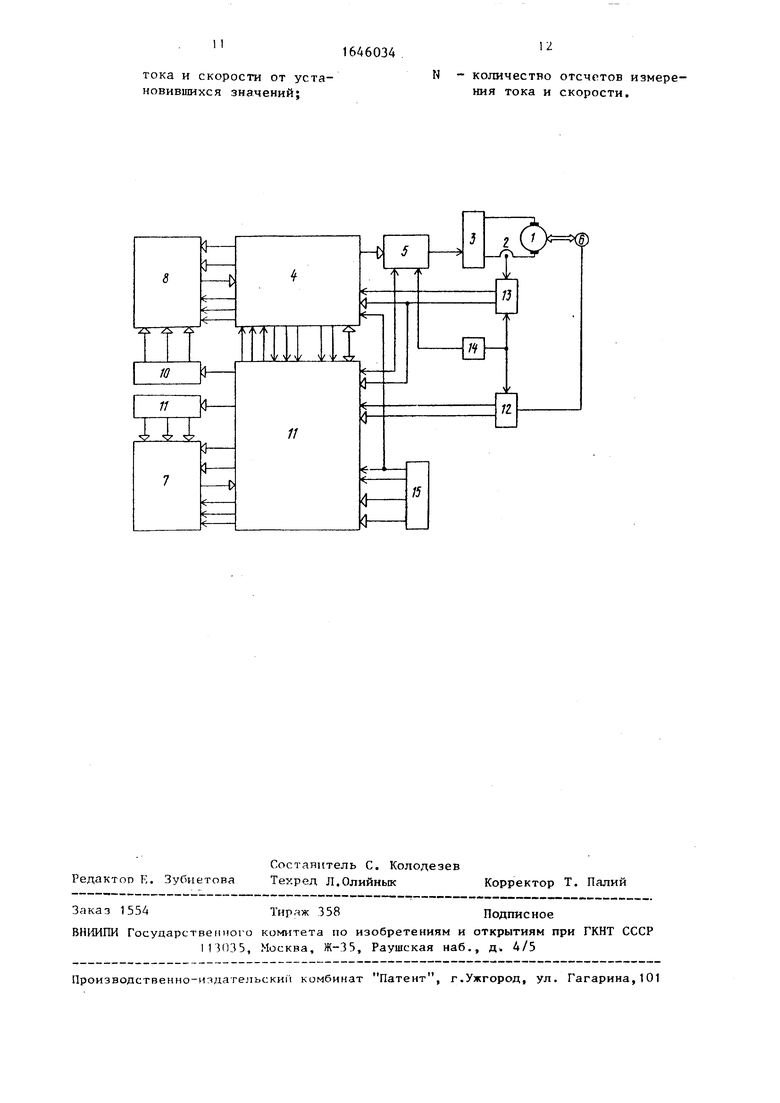
На чертеже приведена схема предлагаемого электропривода.
Электропривод постоянного тока содержит электродвигатель 1, в якорной цепи которого установлен датчик 2 тока, подключенный к выходу транзисторного коммутатора 3, к входу которого подключены последовательно соединенные первое вычислительное устройство 4, преобразователь 5 код - интервал, вал электродвигателя 1 меха нически соединен с датчиком 6 скорости.
Кроме того, электропривод постоянного тока содержит первый 7 и второй 8 блоки умножения, первое 9 и второе 1C постоянные запоминающие устройства, второе вычислительное устройство 11, цифровые преобразователи скорости 12 и тока 13, генератор 14 тактовых импульсов, первый и второй выходы которого соединены с синхронизирующими входами, соответственно, преобразователя 5 код - интервал, цифрового преобразователя 12 скорости и цифрового преобразователя 13 тока, информационный и сигнальный выходы которого подключены соответственно к первым группам входов и первым входам первого 4 и второго 11 вычислительных устройств, вторая группа входов и второй вход яторого вычислительного устройства 11 - к информационным и сигнальным выходам цифрового преобразователя 12 скорости, третий, четвертый, пятый входы, первый, второй, третий, четвертый, пятый
tf
С
о
-U
сь
о со
4ь
3
выходы, вторая группа входов первого вычислительного устройства 4 соеди- йены соответственно с первым, вторым, третьим выходом, третьим, четвертым, пятым, шестым, седьмым входом, третьей группой входов второго вычислительного устройства 11 , ШЕСТОЙ, седьмой, восьмой выходы, четвертая группа входов, первая, вторая группы выходов и третья,четвертая группы выходов которого соединены соответственно с первым, вторым, третьим входами, первой группой входов первого блока 7 умножения и группами входов первого 9 и второго 10 постоянных запоминающих устройств, шестой, седьмой, восьмой выходы, третья группа входов, первая, вторая группа выходов первого вычислительного устройства 4 соединены соответственно с первым, вторым, третьим входами, группой выходов, первой, второй группами входов второго блока 8 умножения, первый, второй,
1646034
третий выходы каждого постоянного запоминающего устройства 9 и 10 соединены с третьим, четвертым, пятым входами первого 7 и второго 8 блоков умножения, первый выход блока 15 задания подключен к второму входу второго вычислительного устройства 11 и девятому входу первого вычислиIQ тельного устройства 4, десятый вход, пятая, шестая группы входов которого соединены соответственно с вторым выходом, первой, второй группами выходов блока 15 задания.
15 Электропривод работает следующим образом. После включения устройств электропривода и установки начальных адресов регистров условий ( 0; i-v 0) по сигналу Пуск, формиру20 емому блоком 15 задания, в первом вычислительном устройстве 4, в соответствии с алгоритмом работы, осуществляется вычисление ГГИД закона контура регулирования тока двигателя
25

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Способ цифрового управления тиристорным электроприводом постоянного тока | 1988 |
|
SU1582318A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| Устройство для вычисления полиномиальной функции от аналогового аргумента | 1990 |
|
SU1737444A1 |
| Арифметическое устройство в модулярной системе счисления | 1987 |
|
SU1432517A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХФАЗНЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА С ПОМОЩЬЮ ТРЕХФАЗНОГО МОСТОВОГО ИНВЕРТОРА | 2018 |
|
RU2682242C1 |
| Цифровой анализатор спектра,ОСНОВАННый HA диСКРЕТНОМ пРЕОбРАзО-ВАНии фуРьЕ | 1978 |
|
SU807181A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для вычисления спектраМОщНОСТи | 1978 |
|
SU805191A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводе постоянного тока. Целью изобретения является повышение качественных показателей электропривода в области низких частот вращения. Электропривод постоянного тока .содержит последовательно соединенное вычислительное устройство 1, преобразователь 5, код - интервал, транзисторный коммутатор 3, электродвигатель. В данном электроприводе обеспечивается расчет коэффициентов регуляторов тока и скорости в функции дисперсии отклонения значения тока и скорости. 1 ил.
V
К И
Kn( iK) + ки
ут -1 (Ч + н) + к .)-.
где V j, - значение кода на третьей группе выходов вычислительного устройства I на (К-И)-м такте широтно- импульсного сигнала управления; Кп, Ка, KM соответственно коэффициенты пропорциональности, дифференциальной, интегральной составляющих закона регулирования тока; i - заданdK- у т -(„,+ iK) + d(
d, , при К 0(2)
В вычислительном устройстве 11 в- соответствии с алгоритмом осущестv +( KW.W + K|,(w% - WK) + где V k-H - значение кода на третьей группе выходов вьршслительного устройства 11 (определяет значение i на (К+1)- м такте гоиротно-импульспого преобразовататя); KW, К„, К, к(, - соответственно коэффициенты задания скорости и пропорциональной дифференциальной, интегральной составляющих
zk W$.T - (wk.1+ wk.a) + z,.(, zk/
(1)
ное значение тока, формируемое вычислительным устройством 11; iK, I«- значение тока на первой группе входов для К-го - и (К-1)-го тактов широтно- импульсного сигнала; Т - период коммутации широтно-импульсного преобра- зователя; К 1, 2, ..., ;
вляет вычисление ПИД закона контура 45 Регулирования скорости двигателя.
4 t
Wk,) н- Z
Z J+ К(
. WV-CWK - WK.I ,
т
закона регулирования скорости; w«
(3)
W заданное значение скорости двигателя, формируемое блоком 15 задания; WK WK-I значение скорости на второй группе входов вычислительного устройства 11 для К-го и (К-О-го тактов широтно-импульсного сигнала;
}y Т при К О
(4)
Ки, Kg,
К
п
вычисления закоования тока и я по адресам, средних кг-адра- ка (jr к скороснулевых значений
И
К,,тэкг i ч скорости
i-r, - О, задаваемо электропривода) и
устаноривглх(.ч зн (Б процессе работ Значения OjиЬ,увы лам
,(5)
J jn .
где N - количество отсчетов измерения тока и скорости; Ai i - Д WJ-WJ -W-.,; i;, W.f ij-, Wj.( , соответственно, значения тока и скорости Е j-й и (j-l)-u мо- менты измерения согласно блок-схеме алгоритмов о
Первоначально коэффициенты передачи законов регулирования (1), (3) определяются в процессе выполнения алгоритма программы работы вычислительного устройства 11 при Р 0 и i. (i мни определяется минимальмин
мим
ным значением момента удержания электродвигателя в неподвижном состоянии при имеющемся моменте нагрузки на валу). При отработке блоком 5 сигнала управления осуществляется запись в соответствующий регистр битов запрета прерываний по току i и скорости W и на 2-м выходе устройства 11 и устанавливается запрещающий уровень сигнала ПРТ. Поспс записи кода i ,, втором выходе устройства И устанавливается разрешающий уровень сигнала ПРТ. Затем вычисляется приращение W тока i за такт измерения (так измерения тока и скорости обычно выбирается кратным такту широтно-им- пульсного преобразователя) и проверяется ограничение ,/где Д, - граничное значение прпрашения тока, характеризующее переходный процесс, т.е„ в переходных режимах вычисления (J-, не производятся). При расчете значение W2 значение WK устанавливается в соответствующие регистры и умножается в блоке 7 умножителя, при этом происходит смена информа ;ии на группах выходов 1 и 2 устройства 11.
С 1-й группы выходов блока 7 умножения считывается значение W2. В блоке 1 1 организован счетчик тактов и при m N в соответствующие регистры записываются значения W и 1/W,. Информация на группах выходов 1 и 2 устройства 11 обновляется и с 1-й
акои, ра- осений
164603/46
К,,тэкг i ч скорости V
i-r, - О, задаваемое п электропривода) и пи
устаноривглх(.ч значений гцсГи W. (Б процессе работы электропривода). Значения OjиЬ,увычисляются по Формулам
группы выходов блока 7 умножения считывается значение (j- , которое сравнивается с допустимым значением (Т среднего квадратичного отклонения тока. При (jr (j осуществляется аналогичное вычисление среднего квадратичного отклонения Оwскорости днига- геля .
При расчете осуществляется смена информации на группах вводов 3 и 4 vcтройства li с задержкой (на считывание), изменяется состояние на выходах ПЗУ 9, 10 и сформируется игнап зп.ПЗУ на 3-м выходе устройств 11. Таким образом, значения ко-эффит ен
0
5
0
5
0
ТОБ V.
К
К,
и К
считыП« КИ М- сч 10 и ПЗУ о в
GTW,
n urt П4 ваются из ячеек ПЗУ
соответствии со значениями О вычисленными при U - 0 и i процессе работы электропривода в интервал времени, оставшийся после обработки вычислителем программы ПИД закона регулирования, скорость (3), (4), запускаемой прерыванием по скорости W, выполняется подпрограмма, в результате выполнения которой
корректируются значения ,G w, a
К,
следовательно, и коэффициенты Кц, , Кл, KQ, , К„ . После считывания снгГ
налов задания W, и текущей W скорости и проверки аварийных режимов путем сравнения WK с максимальным значением Идцак сравниРается приращение скорости (WK - Wj,.) с максимальным значением прирашения $мак&
При расчете осуществляется запись значения Т (период широтно-им- пульсного сигнала) в регистры чтения из соответствующих регистров результата умнокечшя . выгголненного блоком 3 умножения
У
После вычисления F (W + WK.) в результате расчетов осуцествляется последовательно запись в регистры
Т значений F и -j , считыпагае из регистpa произведения и определение
сомножителя интегральной составляющей Z Kt, ГО1Д закона (3), (4). При записи в регистр значения Z, формируется сигнал на 6-м выходе устройства 11 и изменяется информация на группе входов 1 устройства 11. При выполнении операции умножения с группы выходов блока 7 умножения считывается значение А интегральной составляющей закона (3), (4) и осуществляется определение пропорциональной составляющей G К ..(и,, - Wfc ) ПИД закона регулирования скорости двигателя. При вычислении значения (W - W«) на 7-м выходе устройства 11 формируется сигнал с разрешающим уровнем и осуществляется определение дифференциальной составляющей I (Ка - S)
J- f
ПИД закона (3), (4). При расчете значения Т, считываемого из регистра на выходе 8 устройства 11 формируется разрешающий уровень сигнала.
Окончательно вычисляется значение VK.H Л + G + I выходного сигнала контура регулирования скорости, которое с целью исключения аварийных р жимов в электроприводе проверяется. Величина Vt/.( является задающим сигналом для контура регулирования тока и по двунаправленной магистрали между 2-й группой входов устройства 1 и 3-й групп входов устройства 11 поступает в вычислительное устройство 4. Прерывание таймера сопровождается формированием в блоке синхронизации сигнала прерывания по сигналу на 1-м входе устройства 4„
После считывания значений тока i и проверки на допустимые значения:
L
макс
(максимальное значение приращения тока), WMaKC (максимальное значение приращения тока) (блоки 5-8 осуществляется вычисление интегральной составляющей D К d j, (закона (О, (2) регулирования тока двигателя. При этом считывание сомножителя d к , осуществляется из регистров и на выходе устройства 4 формируется разрешающигй уровень сигнала. Блоком 4, осуществляется вычисление пропорциональной составляющей В Kp(iy- iK) закона (1), (2). При считывании значения (ij, i ;) на 7-м выходе устройства 4 формиру- ется разрешающий сигнал. При расче
5
0
5
те вычисляется дифференциальная составляющая С К - (i,W) закона (1),
т 5(2), Считывание сомножителя - (i -W)
f
осуществляется из соответствующих регистров устройства 4. При появлении сигналов на любом из выходов 6, 7, 8 устройства 4 с задержкой на 2-м выходе устройства 4 формируется сигнал чтения ПЗУ 10 чт ПЗУ10. После вычисления V( D + В + С и проверки условий на минимальное и максимальное значения, значение Vj, записывается в управляющий регистр устройства 1.
Вычисленное значение V по формулам (1), (2) преобразуется преобразователем 5 код - интервал в длительность импульса, поступающего на транзисторный коммутатор 3, Таким образом напряжение на двигателе 1 формируется по широтно-импульсному закону с частотой генератора 14 тактовых импульсов.
30
35
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, в якорной цепи которого установлен датчик тока, подключенный к выходу транзисторного коммутатора, к входу которого подключены последовательно соединенные первое вычислительное устройство, преобразователь код - интервал, вал электродвигателя механически соединен с датчиком скорости, о т л и- 40 чающийся тем, что, с целью повышения качества электропривода в области низких частот, дополнительно введены первый и второй блоки умножения, первое и второе постоянное запоминающее устройство, второе вычислительное устройство, цифровые преобразователи скорости и тока, генератор тактовых импульсов, первый и второй выходы которого соединены с синхронизирующими входами, соответственно, преобразователя код - интефвал цифрового преобразователя скорости и цифрового преобразователя тока, информационный и сигнальный выходы которого подключены соответственно к первым группам входов первого и второго вычислительных устройств, вторая группа входов и второй вход второго вычислительного устройства
45
50
55 подключены к информационным и сигнал ным вькодам цифрового преобразоватегя гкопости, третий четвертый, пятый входы, первый, второй, третий, чет- вертый, пятый выходы, втирля группа входов первого вычислительного устройства соединены соответственно с первым, вторым, третьим выходом, третьим, четвертым, пятым, шестым, седь- мым входом, третьей группой входов второго вычислительного устройства, шестой, седьмой, восьмой выходы, четвертая группа входов, первая, вторая группы выходов и третья, чет- вертая группы выходов которого соединены соответственно с первым, вторым, третьим вхсдами, первой группой выходов первой, второй группой входов первого блока умножения и группами входов первого и второго постоянного запоминающих устройств, шестой, седьмой, восьмой выходы, третья
VK+, - Kn(V ik) + - (i, + iK,)+ dj+
Л
где dk fi Т - -T (i + ik ) -3 B° ВТ°Р°М вычислительном устройL 2 к гстве Реализована следующая математи30 ческая зависимость;
V 2 d .,.
2 (W W)c-l +
vk., Vj + Kn(w WK + f
44 I
H(rw.izAwj,
де Zk -| (WK.,+ W,.t) +
40
+ Z K-1 J V - значение кода на выходе
первого вычислительного45
устройства на (К-И)-м такте широтно-импульсного сигнала}
КП Ictt
К .. - соответственно коэффициен- JQ
ты пропорциональной диффе- ,ьной, интегральной составляющих закона регулирования тока;;
период коммутации широтно-
импульсного преобразователя;
соответственно значения тока эалания и токл на
группа входов, первая, вторая группа выходов первого вычислительного устройства соединены соитиетстврнно с первым, вторым, третьим р-- одами, группой выходов, первой, второй группами входов второго блока умножения, первый, второй, третий высоты каждого постоянного запоминающего vcvpoucTBa соединены с третьим, четвертым, пятым входами первого и второго блоков умножения, блок задания, первый выход блока задания подключен к второму входу первого вычислительного устройства и восьмому эходу второго вычислительного устройства, девятый вход пятая, шестая группы входов которого соединены соответственно с втог, in выходом, первой, второй группами выходов блока задания кроме того, в первом вычислительном устройстве реализована следующая математическая зависимость:
2 (W W)c-l +
f
40
К-м такте широтно-импульс
V- значения кода на выходе
второго вьгчислительного устройства;
V Кя,
К , К(С- соответственно коэффнциен- ты задания скорости и пропорциональной, интегральной и дифференциальной составляющих закона регулирования скорости;
W., W, - соответственно, значения
скорости задания и скорости на К-м такте широтно- импульсчого сигнала;
Cf., и..- соответственно средние
квадратические отклонения
тока и скорости от установившихся значений;
N - количество отсчетов измерения тока и скорости.
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США Р 4719400, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
