Изобретение относится к элементам систем автоматического управления и может быть использовано для улучшения качества систем путем введения астатизма.
Известно линейное корректирующее устройство, содержащее интегратор, сумматор и динамические звенья 1.
Основной недостаток этого устройства - взаимнооднозначная связь между амплитудой и фазовой характеристиками, ограничивающая его корректирующие свойства.
Наиболее близким к предлагаемому является псевдолинейное корректирующее устройство, содержащее логический блок управления, состоящий из двух линейных динамических звеньев, четырех, релейных блоков и трех блоков умножения, а также интегратора, вход которого соединен с входом устройства и с первым входом сумматора, а выход - с вторым входом сумматора 2.
Недостатком известного устройства является сложность его технической реализации из-за наличия в схеме трех блоков умножения и четырех релейных блоков. Кроме того, оно теряет псевдолинейные свойства при появлении на входе устройства постоянной составляющей.
Цель изобретения - упрощение устройства и сохранение корректирующих свойств при наличии постоянной составляющей на входе устройства.
Поставленная цель достигается тем, что в устройство, содержащее интегратор, вход которого соединен с входом устройства и с первым входом сумматора, а выход - с вторым входом сумматора, введены последовательно соединенные запоминающий элемент и масщтабный блок и последовательно соединенные дифференцирующее звено и нуль-орган, выход которого подключен к управляющему входу запоминающего элемента, входы дифференцирующего звена и запоминающего элемента соединены с входом устройства, а выход масштабного блока подключен к третьему входу сумматора, выход которого является выходом устройства.
На фиг. 1 представлена структурная схема предлагаемого псевдолинейного корректирующего устройства; на фиг. 2 - формы сигналов, поясняющие работу устройства.
На фиг. 1 и 2 приняты следующие обозначения: входной сигнал х устройства; выходной сигнал Y устройства; выходной сигнал Z интегратора; выходной сигнал (е днфференцирующего звена; выходной сигнал V нуль-органа; выходной сигнал и запоминающего элемента; смещение х; постоянная составляющая UQ сигнала и.
Устройство включает интегратор 1, вход и выход которого соединены соответственно с первым и вторым входом сумматора 2,
к третьему входу которого через масштабный блок 4 подключен выход запоминающего элемента 3. Вход последнего непосредственно соединен с входом устройства, а также с входами интегратора 1 и дифференцирующего звена 5, выход которого через нуль-орган 6 подключен к управляющему входу запоминающего элемента 3. Выходом устройства является выход сумматора 2. Устройство работает следующим образом.
Входной сигнал X (t) поступает на первый вход сумматора 2, а также на входы интегратора 1, запоминающего элемента 3 и дифференцирующего звена 5. Сигнал &)..(t) с
выхода дифференцирующего звена 5 поступает на вход нуль-органа 6, выходной сигнал которого v...(t) представляет последовательность импульсов, возникающих в моменты tj .равенства нулю сигнала (t.(t). Эти импульсы поступают на управляющий
вход запоминающего элемента 3, который фиксирует входной сигнал х (t) в моменты t ,сохраняя постоянным зафиксированное значение амплитуды сигнала на промежутке времени tj, .., В результате сигнал
X (t) преобразуется запоминающим элементом 3 в кусочно-постоянный сигнал U(t), который через масщтабный блок 4 с инвертированием подается на третий вход сумматора 2, на второй вход которого поступает сигнал 2 (t) с выхода интегратора 1. На
отрезке времени между двумя запоминающими ti, tiVj.... для сигнала на выходе устройства (t) можно записать
Y(t)x(t)+.K.2.(t)+KoU(t), (1) гдez.(t)z(ti)..+; x(t)dt;
шостоянное на отрезке
U№))времени tj, зафиксированное значение сигнала x(ti); ij -моменты запоминания; Ко,Kf-постоянные коэффициенты.
Проводя гармоническую линеаризацию
выражения (1) для передаточной функции дифференцирующего звена 5, вида N(S),, (2) что соответствует реальному дифференциатору, получают следующее значение эквивалентной передаточной функции устройства Н Ае8. (3),
(l.K..(Ko|:,:,-p arete
l+Ko
1+ ев Т
Как видно из соотношений (3), эквивалентные амплитуды и фазовая характеристики устройства не зависят от амплитуды входного сигнала х (t) и, следовательно, оно является псевдолинейным.
Появление на входе корректирующего устройства сигнала смещения ж о приводит
лишь к смещению выходного сигнала u(t) запоминающего элемента 3 на величину Хо без изменения формы этого сигнала V.(t). Так как выходной сигнал Ш ..(t) дифференцирующего звена не содержит постоянной составляющей, то измеиения моментов запоминания tj .до сравнению с симметричным режимом не происходит. Таким образом, запоминающий элемент 3, а следовательно, и все устройство в целом осуществляет линейное преобразование постоянной составляющей входного сигнала x(t) и псевдолинейное преобразование переменной составляющей.
В результате предлагаемое псевдолинейное корректирующее устройство позволяет получать системы, показатели качества которых не изменяются при возникновении в сигнале ошибки смещения х.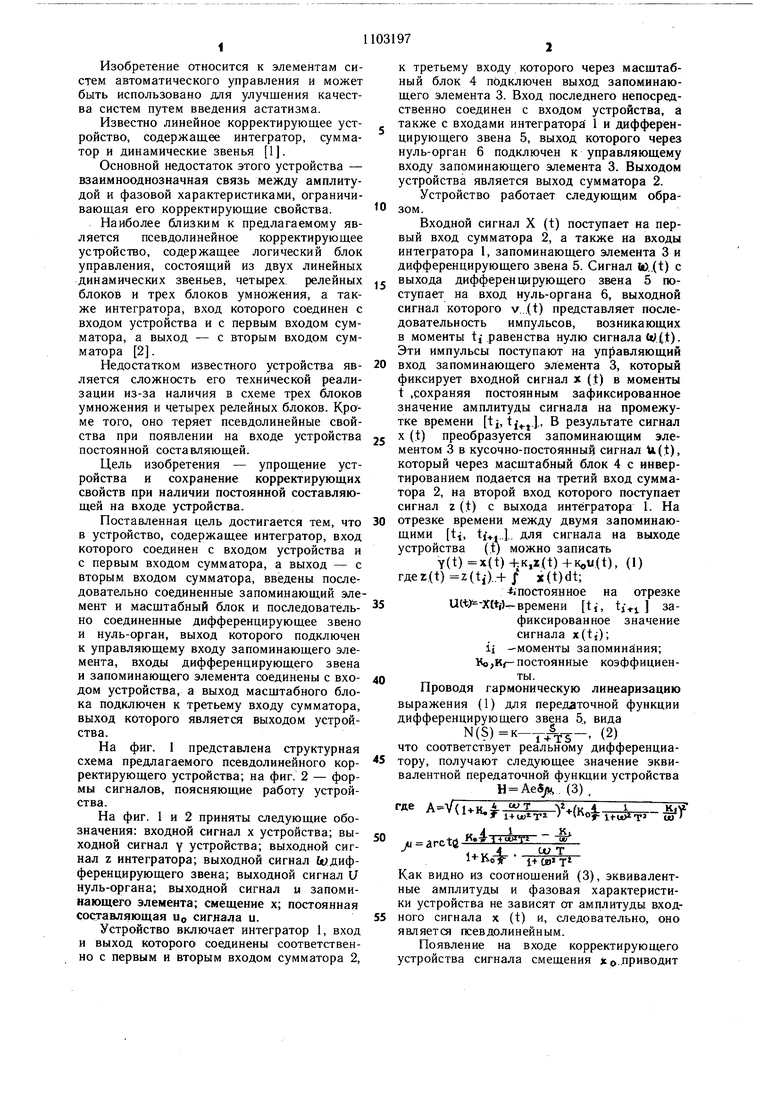

| название | год | авторы | номер документа |
|---|---|---|---|
| Корректирующее устройство | 1986 |
|
SU1390597A1 |
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| Анализатор функций плотности распределения | 1978 |
|
SU752354A2 |
| Функциональный частотный преобразователь | 1983 |
|
SU1120365A1 |
| Измерительный частотный преобразователь | 1974 |
|
SU518866A1 |
| Устройство для моделирования упругого гистерезиса | 1986 |
|
SU1397946A1 |
| Нелинейное корректирующее устройство | 1978 |
|
SU750421A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
ПСЕВДОЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее интегратор, вход которого соединен с входом устройства и с первым входом сумматора, а выход - с вторым входом сумматора, отличающееся тем, что, с целью упрощения устройства, в нем установлены последовательно соединенные запоминающий элемент и масщтабный блок и последовательно соединенные дифференцирующее звено и нуль-орган, выход которого подключен к управляющему входу запоминающего элемента, входы дифференцирующего звена и запоминающего элемента соединены с входом устройства, а выход масштабного блока подключен к третьему входу суммато-ра, выход которого является выходом устройства. 00 Х 
(at
V
Редактор С. ЛисинаТехред И. ВересКорректор И. Муска
Заказ 4978/35Тираж 842Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская иаб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель Г. Вышковский
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесенерский В | |||
| А., Попов Е; П | |||
| Теория систем автоматического регулирования | |||
| М., «Наука, 1975, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Псевдолинейное корректирующее устройство | 1976 |
|
SU640248A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
