i Изобретение относится к нелинейным корректирунпцим устройствам и может быть использовано в системах автоматического регулирования и управления, которые подвержены действию возмущений. Известно корректирующее устройство, содержащее последовательно соеди ненные запоминающий блок, первый масштабирующий блок и сумматор, вторым входом через второй масштабирующий блок подключенный к сигнальному входу запоминающего блока и фильтра выходом через нуль-орган подключенный к управляющему входу запоминающего блока tl}. Известно корректирующее устройство, содержащее последовательно соеди ненные, запоминающий блок, масштабирующий блок, сумматор, релейный блок и блок умножения, вторым входом чере блок определения модуля соединенный с выходом запоминающего блока, сигнальный вход которого соединен с вто рым входом сумматора и через последо вательно соединенные фильтр и нульорган - с управляющим входом запоминающего блока 2. Недостатками известных корректирующих устройств являются их сложность и низкое быстродействие, Наиболее близким к предлагаемому по технической сущности является корректирующее устройство, содержаще последовательно соединенные запоминающий блок, масщтабирующий блок и сумматор, вторым входом соединенный с входом запоминающего блока, интегратора и фильтра, входом через нуль-орган соединенного с управляющим входом запоминающего блока, выход интегратора соединен с третьим входом сумматора з. Однако после затухания переходного процесса в устройстве возникают автоколебания. Целью изобретения является уменьшение амплитуды автоколебаний в корректирующем устройстве. Поставленная цель достигается тем что в корректирующем устройстве, содержащем последовательно соединенные запоминающий блок, масштабирующий блок и сумматор, вторым входом подключенный к входам интегратора и-фильтра, выходом через нуль-орган соединенного с управляющим входом запоминающего блока, выход интеграто ра соединен с сигнальным входом запоминающего блока. На фиг. 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - фазовый портрет системы, в которой установлено предлагаемое устройство. Схема (фиг. 1) содержит блок 1 сравнения, сумматор 2, интегратор 3, объект 4 регулирования, запоминающий блок 5, масштабирующий блок 6, фильтр 7, нуль-орган 8, корректирующее устройство 9, На фиг. 2 приняты следующие обозначения: 10-16 фазовые траектории; х, х - сигнал рассогласования и его первая производная. На фиг. 1 приняты следующие обозначения: f - сигнал возмущения; у - выходной сигнал объекта 4; z выходной сигнал корректирующего устройства 9; V - выходной сигнал фильтра 7; W - выходной сигнал интегратора 3; U - выходной сигнал запоминающего блока 5; g - сигнал задания. Рассмотрим работу корректирующего устройства в составе системы автоматического регулирования, которая содержит блок 1 сравнения, выход которого соединен с входами интегратора 3, фильтра 7 и первым входом сумматора 2, к второму входу которого через масштабирзтощий блок 6 подключен выход запоминающего блока 5. Выход интегратора 3 соединен с входом запоминающего блока 5, а выход 7 через нуль-орган 8 подключен к управляющему входу запоминающего блока 5. Выход сумматора 2 связан с входом объекта 4 регулирования, выход которого связан с первым входом блока 1 сравнения, на второй вход которого подается сигнал задания. Система работает следующим образом. Сигнал рассогласования системы х с выхода блока 1 сравнения подается на первый вход сумматора 2, а также на входы интегратора 3 и дифференцирующего фильтра 7, последний в общем случае имеет передаточную функцию H-7/S/ ti+trjS t,( H;f-S) . В моменты времени t., когда сигнал v на выходе фильтра / переходит из положительной области в отрицательную и наоборот, нуль-орган 8 выдает сигнал на управляющий вход запоминающего блока 5. Запоминаю дай блок 5 фнксирует в моменты времени t- сигнал, поступивший на его вход, сохраняя постоянным зафиксированное значение сигнала и на промежутке времени t,-, t ;4. . Тогда для отрезка време ни , можно записать z x+kpU, где (t) - постоянные на отрезк времени t; , t, зафиксированные знач ния интеграла от сиг нала рассогласОВания X системы t - моменты запоминания; k - коэффициент передачи масштабирующего блока 6. Пусть движение в системе автоматического регулирования описывается дифференциальным уравнением .fex -K,bu.J-.c. olt ° dt ,2 ci-t I, Ь, d, с - постоянные коэффигде а. циенты. Дифференциальное уравнение замкн той системы относительно выходного сигнала w интегратора 3 имеет вид - .Ъ...с|.14. Л di Предположим, что сигналы задания и возмущения f имеют скачкообразный характер, т.е. (t) и (t) Покажем, что в предлагаемой систе ме статическая ошибка ликвидируется Для этого найдем установившиеся значения ст и vjcT Пусть все производные в уравнениях (1) и (2) равн нулю, тогда b acT -Kobu -cf cf. SCTПодставив выражение (4) в (3), получим, что х,т 0. Рассмотрим теперь переходный процесс в системе автоматического регулирования. Пусть выходной сигнал v фильтра формируется следующим образом t X(5) Предположим, что до появления возмущения систе.ма находилась в состоянии покоя ( 0), а в момент появления возмущения запоминание не происходит, так как в общем случае х+Тх 0, поэтому . Так как коэффициент передачи разомкнутой системы обычно достаточно велик, то корни характеристического уравнения замкнутой системы будут комплексно-сопряженными. Движению системы на фазовой плоскости (х, X ) (фиг. 2) из начального состояния (точка А) соответствует спираль 12, которая либо накручивается на точку () при , либо раскручивается при . Такое движение происходит до момента времени t , когда fx(t)-x(t), т.е. когда изображающая точка попадает на прямую MN (фиг. 2). После этого движение системы происходит под действием постоянного зафиксированного сигнала kow(ti) ц начальных условий x(t) и yL( ;(t). в зависимости от значения коэффициента передачи к масштабирующего блока 6 это движение может происходить по траекториям 12, 13 и 14, Если коэффициенты к и Т выбраны так, что фазовая траектория в момент времени , проходит через начало координат (, х 0) и запомненный сигнал w(t2) cf o/bkji, то система останавливается точно в заданном состоянии траектории 13 (фиг. 2). При этом автоколебания в системе отсутствуют, 1пя систем автоматического регулирования, начальные состояния которых лежат на линии KL (фиг. 2), переходный процесс заканчивается за конечное время ,+tj точно в заданном состоянии. При отклонении начальных состояний от линии KL изменяется характер переходных процессов в системе. Время переходного процесса при этом меняется незначительно. Если движение системы начинается из областей МОК и- LON фазовой плоскости, то переходные процессы в ней протекают с перерегулированием (фиг. 2, траектория 15). Переходные процессы без перерегулирования имеют место в системе, начальные состояния которой лежат в областях MOL и KON (фиг. 2, траектория 16), Таким образом, соединение выхода интегратора с сигнальным входом запоминающего блока позволяет улучшить качество процессов в системе в результате уменьшения амплитуды автоколебаний в корректирующем устройстве примерно в восемь раз. За базовый объект принята система автоматического регулирования, в которой в качестве регулятора используется промышленное регулирующее устройство типа Ф5179 с адаптивным субблоком Ф5181. Регулирование в такой системе ведется по ПИД-закону, в котором коэффициент передачи меняется по следующему алгоритму 0,2 при .,IE|+c K, 5,0 при Ох„|+к.,, где Jtl - модуль ошибки регулирования запоминаемое максимальное значение демпфированного сигнала модуля ошибки регулирования;запоминаемое максимальное значение производной регули руемого параметра; Kj, - соответственно коэффициенты упреждения и соотношения; с - постоянный коэффициент. Таким образом, базовый объект относится к системам с переменной структурой, в которых при несимметричных режимах, возникающих при действии на систему внешних возмущений, качество процессов ухудшается, в частности в системе могут возникнуть автоколебания. Кроме того, базовый объект имеет сложную конструкцию, так как содержит два блока запоминания и три блока модуля. Применение предлагаемого изобретения позволяет примерно в шесть раз упростить конструкцию системы и улучшить интегральные оценки качества регулирования в ней примерно в восемь раз в результате уменьшения амплитуды автоколебаний в пред- лагаемом корректирующем устройстве.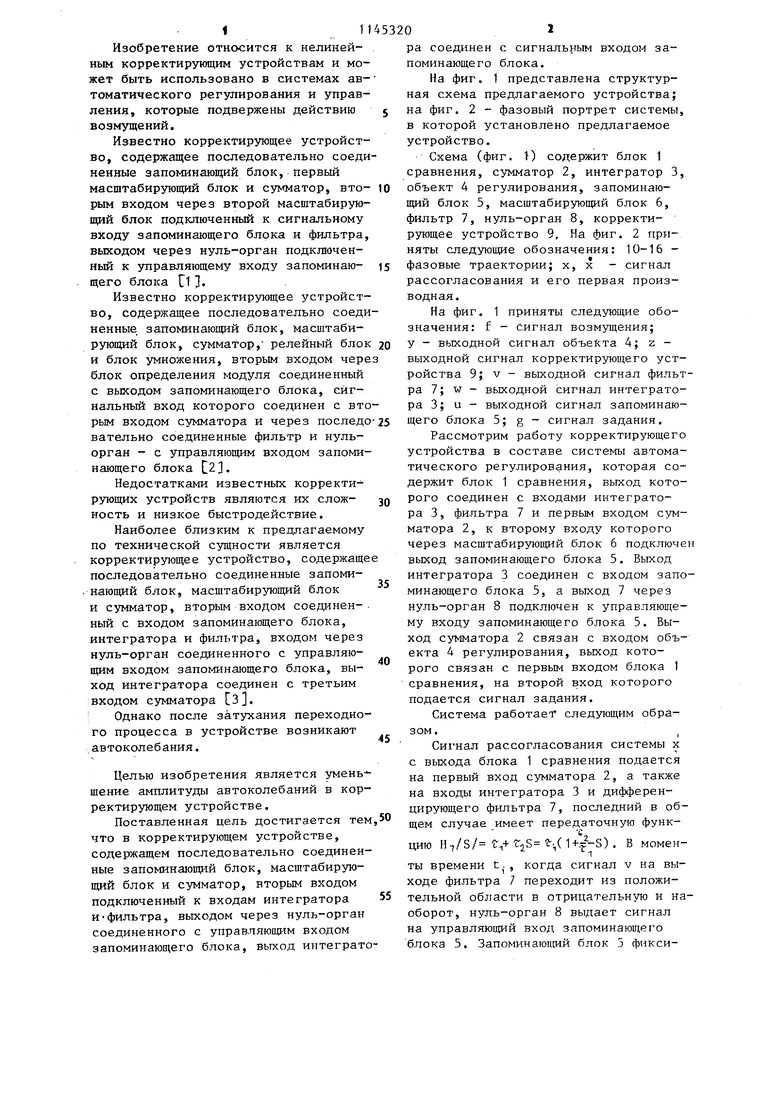

| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 1972 |
|
SU435499A1 |
КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО, содержащее последовательно соединенные запоминающий блок, масштабирующий блок и сумматор, вторым входом подключенный к входам интегратора и фильтра, выходом через нуль-орган соединенный с управляющим входом запоминающего блока, отличающееся тем, что, с целью уменьшения амплитуды автоколебаний в устройстве, в нем выход интегратора соединен с сигнальным входом запоминающего блока.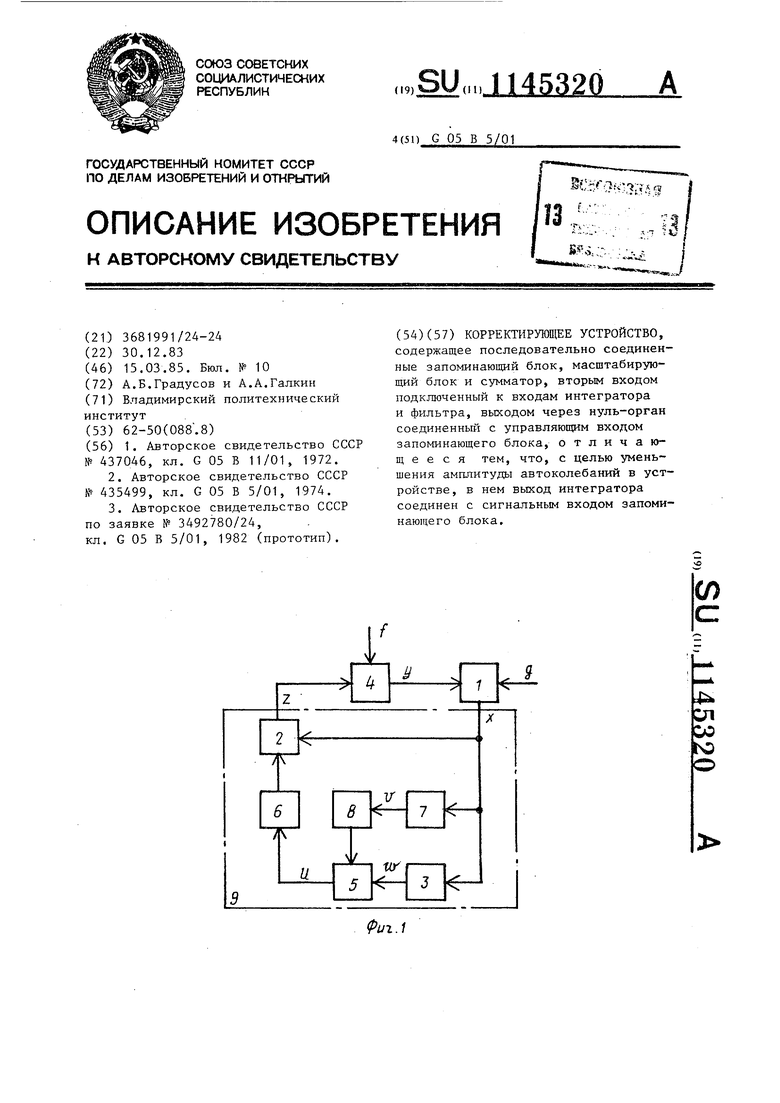
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического регулирования | 1972 |
|
SU437046A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
