(54) ЭЛЕКТРОПРИВОД ДЛЯ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Электропривод | 1980 |
|
SU1053253A1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Устройство для динамического торможения асинхронного электродвигателя | 1980 |
|
SU868959A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1980 |
|
SU1046887A2 |
| Устройство для регулирования скорости частоты вращения асинхронного двигателя | 1979 |
|
SU936324A2 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1037402A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Устройство для регулирования частоты вращения асинхронного двигателя | 1980 |
|
SU936326A2 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |

Изобретение относится к эпекгрогехнике, а именно к авгоматизированному элек тропривоау, и может быть использовано в электроприводах крановых механизмов с регулированием скорости передвижения в широких пределах. Наиболее близким по технической сущ ности и достигаемому результату к прец- лагаемому является электропривод для грузоподъемного механизма, содержащий асинхронный электродвигатель, основной коммутатор в цепи обмоток статора, управляемый выпрямитель в цепи ротора, к выходу которого подключен резистор, последовательно соединенные .элемент с регулируемым nopoiOM срабатывания и рас- преаелитель импульсов, выход которого соединен с управляющими электродами ти ристоров выпрямителя, а один вход элемента с регулируемым порогом срабатывания соединен с анодной группой выпрям теля, блок управления основным коммутатором и команао чппарат ,1. Однако в известном устройстве ограниченная возможность его примененияв связи с тем, что оно не позволяет учитывать характер и величину момента нагрузки и не обеспечивает регулирование скорости двигателя при активном моменте нагрузки, т.е. регул1фование скорости производится в первом и четвертом квадрантах механической характеристики в двигательном режиме работы и не регулируется скорость привода во втором и четвертом квадрантах механической характеристики в тормозном режиме работы. Цель изобретения - расширение функциональных возможностей электропривода. Указанная цель достигается тем, что в электропривод для грузоподъемного механизма введены задатчик нагрузки, эле мент .ИЛИ, дополнительный коммутатор и блок управления им, причем одни из выводов дополнительного коммутатора соединены с выходом выпрямителя, а другие выводы его с двумя обмотками статора двигателя, вход аадатчика нагрузки соеоинеи с команцоаппаратом, а его один выход - с блоком управления основным коммутатором и с одним из вкодов элемента ИЛИ, дру.гой вход которого соединен со вторым выходом задатчика нагрузки и с блоком управления дополнительного коммутатора, выход элемента ИЛИ соединен со вторым входом элемента с .регулируемым порогом срабатывания.
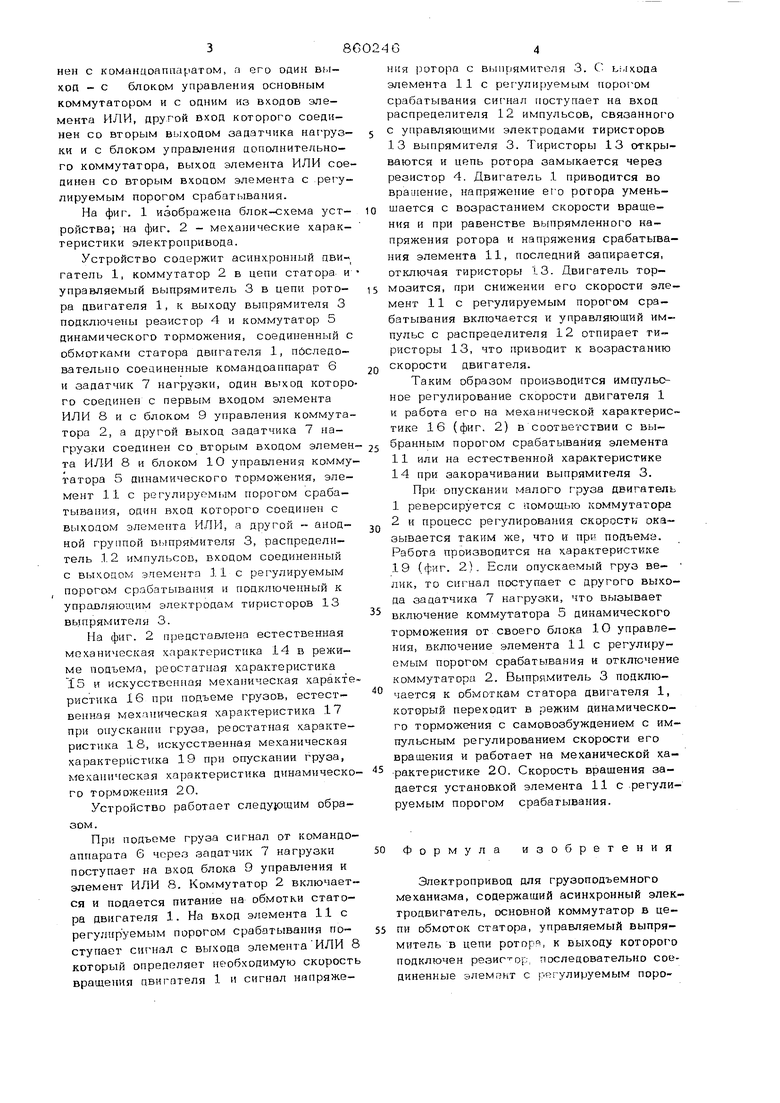
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - механические характеристики электропривода.
Устройство содержит асинхронный ЦБИ гатель 1, коммутатор 2 в цепи статора и управляемый выпрямитель 3 в цепи ротора двигателя 1, к выходу выпрямителя 3 подключены резистор 4 и коммутатор 5 динамического торможения, соединенный с обмотками статора двигателя 1, пбслецовательно соеаиненные командоаппарат 6 и задатчик 7 нагрузки, один вьход которого соеци ен с первым входом элемента ИЛИ 8 и с блоком 9 управления коммутатора 2, а другой выход задатчика 7 нагрузки соединен со вторь1М входом элеме та ИЛИ 8 и блоком 1О управления комму татора 5 динамического торможения, элемент 11с регулируемым порогом срабатывания, один вход которого соединен с выходом элемента ИЛИ, а другой анодной группой В1 1прямителя 3, распределитель 12 импульсов, входом соединенный с выхоцом элемента lie регулируемым порогам срабатывания и подключенный к управляющим электродам тиристоров 13 выпрямителя 3. На фиг. 2 представлена естественная механическая характеристика 14 в режиме подъема, реостатная характеристика 15 и искусственная механическая характ ристика 16 при подъеме грузов, естественная механическая характеристика 17 при опускании груза, реостатная xapaicTeристнка 18, искусственная механическая характеристика 19 при опускании груза, механическая характеристика динамическо
го торможения 20.
Устройство работает следующим образом.
При подъеме груза сигнал от командоаппарата 6 через зацатчик 7 нагрузки поступает на вход блока 9 управления и элемент ИЛИ 8. Коммутатор 2 включается и подается питание на обмотки статора двигателя 1. На вход элемента Не регулируемым порогом срабатывания по ступает сигнал с выхода элемента ИЛИ 8 который определяет необходимую скорость вращения двигателя 1 и сигнал напряжеция ротора с выпрямителя 3. С ьыхода элемента 11с регулируемым порогом срабатывания сигнал поступает на вход распределителя 12 импульсов, связанного
с управляющими электродами тиристоров 13 выпрямителя 3. Тиристоры 13 открываются и цепь ротора замыкается через резистор 4. Двигатель 1 приводится во вращение, напряжение его ротора уменьшается с возрастанием скорости вращения и при равенстве выпрямленного напряжения ротора и напряжения срабатывания элемента 11, последний запирается, отключая тиристоры 13. Двигатель тор-
мозится, при снижении его скорости элемент 11 с регулируемым порогом срабатывания включается и управляющий импульс с распределителя 12 отпирает тиристоры 13, что приводит к возрастанию
скорости двигателя.
Таким образом производится импульсное регулирование скорости двигателя 1 и работа его на механической характерис тике 16 (фиг. 2) в соответствии с вы-
дается установкой элемента 11с регулируемым порогом срабатывания.
Формула изобретения
Электропривод для грузоподъемного механизма, содержащий асинхронный электродвигатель, основной коммутатор в цепи обмоток статора, управляемый выпрямитель в цепи ротора, к выходу которого подключен резистор, последовательно соединенные элемгэнт с рйгулируемым поробранным порогом срабатывания элемента 11 или на естественной характеристике 14 при закорачивании выпрямителя 3. При опускании малого груза двигатель 1реверсируется с помощью коммутатора 2и процесс регулирования скорости ока зывается таким же, что и при подъема. Работа производится на характеристике 19 (фиг. 2), Если опускаемый груз ве- лик, то сигнал поступает с другого выхода задатчика 7 нагрузки, что вызывает включение коммутатора 5 динамического торможения от своего блока 10 управления, включение элемента 11с регулируемым порогом срабатывания и отключение коммутатора 2. Выпрямитель 3 подключается к обмоткам статора двигателя 1, который переходит в режим динамического торможения с самовозбуждением с импульсным регулированием скорости его вращения и работает на механической ха.рактеристике 2О. Скорость вращения загом срабатывания и расаределитепь импульсов, выход которого соединен с управляющими элрктроцами тиристоров выпрямителя, а один вход элемента с регулируемым порогом срабатывания соединен с анодной группой выпрямителя, блок управления основным коммутатором и командоаппарат, отличающийся тем, чго, с целью расширения функциональных возможностей, в него введены задатчик нагрузки, элемент ИЛИ, дополнительный коммутатор и блок управления им, причем одни из выводов дополнительного коммутатора соединены с выходом выпрямителя, а другие выводы его с двумя обмоткаМИ статора двигателя, вход задатчика нагрузки соединен с командоаппаратом, а его один выход - с блоком управления основным коммутаторе и с одним из входов элемента ИЛИ, другой вход которого соединен со вторым выходил аацатчика нагрузки и с блоком управления дополнительного коммутатора, выход элемента ИЛИ соединен со вторым входом элемента с регулируемым порогом срабатывания
Источники информации, принятые во внимание при экспертизе
/7
17
/f
(риг. г
