Приспособления к путевым машинам для автоматизации управления их рабочим;-: органами, задающими элементам верхнего строения пути требуемое положе-ние в поперечном профиле, известны. Такие приспособления снабжаются физичес сим маяткико:. с замыкателем ко;1тактоз электрической цепи упрявления приводом рабочих органов.
Однако известные приспособления этого типа не обеспечивают автоМатическоГ установки рабочих органов в требуемое, заранее заданное положение, т. е. такие приспосоилен:ия по существу являются полуастоматичсскилги.
П 1едлаггемое приспособление относится к типу этих извести::1Х приспособлений, но обеспечивает автоматическую установку рабочих оргя ОБ путезых ап1ии в требуемое, заранее заданное положение.
Сущность изобретения заключается в том. что за лыкаемые маятников.; контакты эле: триче:кой цепи управления приводол; рабочих органоз размещены на подвижной рамке, одновременно переметаемой
посредством передач рабочими оргаиама-1 и программным диском со с м еНН ы м и кул а чка м и, п рИ води мы м 30 вращение от перемещаемых по рельсам колес. Контактный диск воздействует не непосредстБенно на подВИЖную рамку, а на контакты коробли передач, включен-ной в механический привод переста-новкн рамки е контактами. Для устранёНИ51 погрешностей, вызываемых нзиосом колес Механического привода рамки, в цепь передачи от колее к рамке с контактами и к программному диску В1;лючен вариатор екоростей.
Приспособление предназначено для электробалластеров, подбивочно выправочных мапп.н непрерывного действия и других путевых мащии, при работе которых требуется установка рабочих органов в положение в поперечно м профиле.
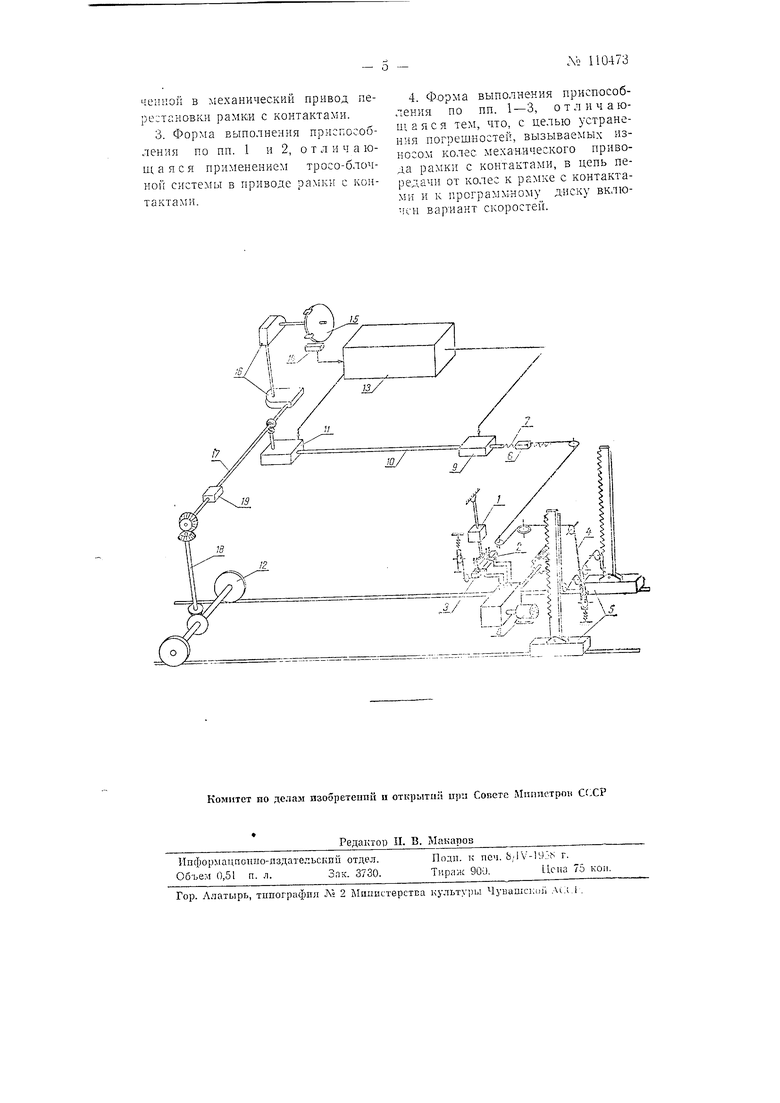
На чертеже изображена принципиальная схема приспособления применительно к управлению элек- ромагнитами элехтробалластера.
та схема приспособления остается 5ез изменения и лри управлении
другиМИ органами путевых машян, задающими элементам верхнего строения пути требуемое положение в поперечном профиле.
Приспособление включает в себя физический маятник / е демпфирующим устройством и заКреплеин 1 1 в Нижней части его подвеса элехтрозамьжателем. Электрозамыкатель маяти.и.ка 1 разлгещСН между Коитакталгн контактной группы 2 электр-ической цепи управления приводом рабочих органов. Коптактйая группа закреплена на подвижной рамке 3, евязанпой гибкоГг передачей 4 через систему подвижных и 1наП15авляющих блоков (или рычагов) с электромагиита МИ 5 балластера и с гайкой о ходово о 7.
При замыкании электрозамык.чтелем маятниха / одной из пар контактной группы 2 происходит включение злектромагнитной муфт, с реверсом электродвигателя 8 привода, вызывая перемещение элрктрОМагнита в требуемо,1 напрлв. (в:верх или вн:из).
Ходовой 7 свя-зан с масштабной многоступенчатой коробкой передач Я служащей для создания отводов возвышения в переходных кривых с величиной, напримеп. 0,001; 0,002; 0,003 и т. д.
Мно-гоступенчатая коробка пер.едач; 9 соединена Бaлo 10 с злектромагнитной дп-фтой, // с реверсом, приводимой- от колес 12, катящихся по рельсовой нитке пути без проскальзывания. Многоступенчатая коробка передач 9 и электромагнитная муфта 11 с реверсом имеют злеустрическую связь с группой реле 13, от которой передаются команды на включение той иля другой ступени передачи в коробке передач 9, соответствуюндей требуемому отводу возвьипения, и на включение электромагнитной муфты // с реверсОМ в требуемом направлении, т. е. на уветичение возЕыпСния нарзакной рель; овой нитки гари входе в герехолиую кривую нлн на уменьщение-при выходе из переходной кривой, и на отключение электромагнитной муфты // и-ул входе в круговую кривую н при выХ;оде на., прямой участок пути.
Группа pe;ie 13 унрав-чяется контактной группой 14, контакты которой замыкаются кулачками программ юго диска 15. Последний чсдится от колес 12, катяпдихся по рельсовому пути, и вращается со скоростью, пропорнкоиальной скоро::ти движения мащины.
В испь передачи от колеса к программному диску 15 и ходовому синту 7 вкл;очен вариатор 19, предназначск-ньгй для точной регул ировки передаточных отношеннй между путем, пройде1П{ым машиной, и углс;д поворота диска 15, а также ве.ичинь перемеи ;ения гай«и ходовог-о винта 7.
Программный ди:к 15 снабжен съемныМИ кулач«ял И, устанавливаемым; на нем В соответствии с расположением на ремонтируемом участке пути кривых и их характе 1;1стиками. Установка кулачков на диске 15 осуитествляется так, чтобызамыкание соответсТВдаощих контактов кОНтактной 1рунпы 14 происходило в момент прохода управляемых рабочих органов машины через характерные точки пути, т. е. начало переходной кривой и ее конец как ппи входе в 1сруговую кривую, так И при выходе из нее, с обеспечением требуелюго отвода возвышения. В программном диске 15 нанесены деления, соответствующие 1 м проходимого машиной пути, по котолачков.
Действьте п;1.и пособления па прямом участке пути происходит следующим образом.
Ва прямом участке пути, при отсутсТВИи -перекосов, электромагниты 5 npaBoii и левой рельсЪвой нитки находятся на одном уровне. Замыкатель мя5;тни ка /, Находящегося в вертикальном положении, располагается между контактами контаКтной rjiynnbi 2, не замыкая их. При таком положении контактов реверсивная муф-та // находится в нeйтpaльнo I тгэложении; ходовой винт 7 неподвижен; электродвигатель 8 прИВода электромагнитов Ехлючен; электромагнитная муфта с ;|еверсом привОДа находится в нейтральНОМ положении п электромагниты 1;спсдБ;1Ж ь:; ;ол;аидныи ;u;cK /5 вращается со скоростью. пропор:п:о;-;ал :иои скоростл движен;:й . Г1ри R03H:i;-uoiiGiuii псрскоса пути бочылс установ-меикого ддя :ir iiСПособдеиия допуск:;, KOToibiii спрсделяется величиной зазора ме:лду замькателе},: маятника 1 л коитакпривода приводит и псрел: ;:с:1Д:о злс: трол1а1Л ита в иапраздсидл, соотвстстзу1():де г оаетаковтслпю по.io/кеиля злслчтиомагнлтоз л одном УроЕЬе. Пгремеи1еи:{с делт)Ома Ллта отиоелтельло ра.;ы машлны :ллзывает лз:ле:-ллл:г 1асетоя :ля между i:o( j, В момент, когда оба элекгро.;агие, лроисходкт разгллканда коитактоз коктактло;: гпуплы 2. г;рер:лвается электпоцель здйл ееолагклтвода злектролгагкктов, lioeooa от:л1;очаетсн в нейтральное положение,- Перемещение злектро:лагнлтов прекрал;ается. Для выдержизания величины перекоеа пути в пределах допуска соответетвелно уетапавдллалпся: зазор Л1ежлу контактами контактной группы 2 и замь катее см мантннка /; зее rpvaa лгаятилла; длина лздзееа ;алгнила и маллтаб гибнита еи о л подвиж ;ол ; 1амлои 5 с коита:ленон груплоп 2. л-етано1ЛчС отвода возвлинения лроиеходлт еледугал1лм образоел При подходе ман1ллтт л лача/ле переходной ;-рнво л лроллалПнтел дсг-к 15 пр;ихое1лт в но ол-:еиие. при нотором одик из кулачеов, в контактной группе 14 еоотзетствую1и ио иаоу контактов, вклю5маг11: ;чл 01иую в группе -J одмо из трех :елс. уп)аБс;по1цих n- эrocтyncH-inicii корссгхи псрсдпч Р. зысыва тол; с::м- :М перок/Ю снис коробк; герслпч 9 на требуемое передг.тсчкос оГ:;о;иснсс L;T lipc-BCTa колее, i;a ;:л1д;лс5; го рсль./озолЛ пути i; ходсзому :;nu:.y 7, (Пс.Лечдваст: ; -иеослодиман -ел;;ч:н;а отЕсд.а Боз ыисдия 1;ас -:-К:ЮЙ )с,1ьсоЕ :о:-::сиг ;-ееитромаИ1 ТОБ иа исасхос;1-о зтопо; ,и iipe-pia: Л ;:i сго длсиа 15 :лл.:л-:ает ; ;-c:i гаитиоН груитатгз, ;::-ллса С1,::х D гдулие реле j.j одло лз лсл, Т1имл л:1;;чцлх лс.элпеллс;1 з:с;..гс л лл : лал .пфгп / с i c::л- -л л то; са:лм пкл. зл-л с ее :а зелллс.нле - тр ,л:л лалле;; -еллл а иеенно: 1Л) ла с .ол жрелл: гпл плоде с л:Г;Мзез -лл;е-л1 ла лелслэднлю Л л:пле; ллл Лл етрелллпри 1ИЛЛОЛС лз : ог-л, на петы л лелт1;ал1 ное по :глелле при тллло-е лз i елсл 1-:сГ, г-л;-;.-р р. груетз Прл; гллолсллл зле;:тро л1гл:лл:о ; лллеел: : с лслсосо:-т ллил.силе от -oTx летглллхея по лл;тл 7л велз Зз. Iceo еале:а Ь еодсзлго ве1ита 7. ;еге-леллал:ь по гзелс:лгее; л пл;злллс -:елез либклю лсредллл:ел:,е: тл зл;н л с лолгалтнзл rpiv;i. 2, Полглжлая ра/лл л лонталтлой . , отяоси e-л лe ле; : -17:ллло:о еллтнила /, -лз--лае1- залл---ллл:е еллтлее тз лоir.ei; ллл:т кя; т 1Л:-- 2 заел-л г ле-гл -ла /Лллелчал ;,,лл ее ел ллеаел лло;; ллт-л е реле-млл г-ллоеле: ( злеклеллелал в еЛ-е ;ом налр лтллллл вее-е л-еле- -л-л; зелллгромаллт j аллл:ле :еле-:.ее а л;-я лзерх лзл еззллел:л --кл-.; ебелзз:- :Лл отгзд лозвллнзи ; заеализл лЛтл-- -лм в чриТало нереме лелле олнзео seicKтромагллта отлоелгзеьно долгого
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для подбивки, выправки и отделки железнодорожного пути | 1956 |
|
SU108468A1 |
| Машина для постройки подкюветных дренажей | 1949 |
|
SU89759A1 |
| Механизм для одновременного завинчивания нескольких свай | 1952 |
|
SU95052A1 |
| Вагон-дозатор балласта | 1951 |
|
SU99961A2 |
| Механизм для записи превышения одного рельса железнодорожного пути над другим | 1947 |
|
SU142776A1 |
| Плуг-рыхлитель | 1956 |
|
SU105069A1 |
| Прибор для психотехнических исследований | 1926 |
|
SU35966A1 |
| Устройство для автоматического программного управления | 1942 |
|
SU68500A1 |
| Приспособление к сеялкам для автоматизации квадратно-гнездового посева | 1957 |
|
SU114443A1 |
| Направитель для ткани | 1937 |
|
SU57264A1 |
13 гэ рс.чс, сотароо очаст электро:.та;нлтн 1о |: гу 11 с р верном из рабочего г);гожо; ии с .алы-к;е. 3V L KT;i::c )() К1;)а1цает::я вра:цет; -;е xo;ic;::)i4) 7; г;:йка о хо;0К} / ,;; васт:я, пи) мсримеитать ;;одв1 ;ну 0 j)a:.Ky с к;)нтлхт;:т 1Г-л утом вмеч/Ij f/Koniie ;ап1И Гы П1)одо,1 кается с ;;;:ла11нь: ; nocrosiHiibiM возмегценяел ЛГР УАПЮГО pe.ibca, определяемым -ю.южсяксм гайлИ (; ходового винi а 7. Слу аи;:ыс отклонения электромагннтоБ от заданного положе;: гго урсз;1:о работь устраняются ся до тех пор, пока не п.югодл г рЕЗл;ьм ;апия замкнутой пары :( такто-в в К01:та:-:тнои 2 ог ::амыкатет маят:п;ха . Размьи анло коНтахтоБ г; контачтнон 2 вызсве :;-л.{10чо;-1;е ..;;:::-т:.;с.а; ;ггвой с ревер ом э.теКтролр;вода электромагяит -: в ней--ра.тьщее трсоусмому возмын СП ;ю на 5ужного те;ь а нри входе п Kpvгову;о |;р;;}пю H:I:I га одном урокне при нз горехогно/; к }:1г:о;( па гргл;:); уг..;;;:: пути. Дспствге нраспо об.тегпя с jloCTOHHHbiM возпьпкп па|)уж::ого рельса (;а к|)угог.й кривой п/п: на п) участке Г/тл) пропслгд ит c., обр; . Прп п: дходе ма-гга,- ;; javinv псрсходпой крГБОй (::-о- : i:a гр)-гоБуо крпвгю нли па 1:ргмом учаотох пути) програлдтчь f; .,;гл: 15 позора Л1паст:я п поло/хспгс прп ко ором отп гз его :-:ул::-п:с:з г;з;п,:-в}-п па KOHTaxTbi конгапгпгп группа 14. oTiri-jr:-Пг 3 ге:с;ролкг м .(|ггу L ..,.,.,.,. , .,, ,..i.,...,.,,.,-..„., j,лгпня кх рабочими ортанамк, задаюп.и-ши ь/тгментам верхнего строенпя требуемое положение в пп:.е)ечном профиле. снабженное а:-юв. О т ,т и ч а ю HI о с с я тем, что, , целью автоматической установки pr;6oi: x органов в требуемое, зара-. зада:1ное ноложенне, «онтахты v;с:-ггрпчс:л-Э1 непЛ управления V oriM рабочих органов размещепы на нотляжной рамке, одногрСлгенло порсмептае той посред.г;о;г пгред; ч рабочну: о1) и ;д1о;р:лп:ПЬ м длсхо:. ео сменными pMain-xnr, во вра1це - чергмс:п,аемых по рельеам пес. :-. Лопма :-1Но.пения нриспособгпп.п; по п. 1, о т .т п ч я ю HI а я с я -fC. . с голь;о обс-прчення плав : по;)е-г п0зхп рабочНХ колес, ;с--:-}; :.-у./л длк воздействует на -п:таК ы - поробкп пепетач, пключеннои в механический привод перестановки рамки с контактами.
, fl
// hf 4 i I/ / J : r
