teri. г-:,4 -.. . V- .-.,О ,;-т .-«;-: .я.-oY
.. . и.4.; - le- : f:.о. . f ... . о- °
23 30 31
фаг.1
2.Устройство по п.1, отличающееся тем, что дополнительные направляющие выполнены в виде пары роликов, образующих желоб, держатель - в виде штанги, размещенной в желобе,,
3,Устройство по п,1, отличающееся тем, что по меньшей мере два блока установлены на штан-.
ге - по одному на ее противоположных концах, а концы гибкой тяги закреплены на каретке,
4. Устройство по П.1, о т л и чающееся тем, что направляющие закреплены на основании с возможностью поворота ,в плоскости, перпендикулярной направлению перемещения держателя,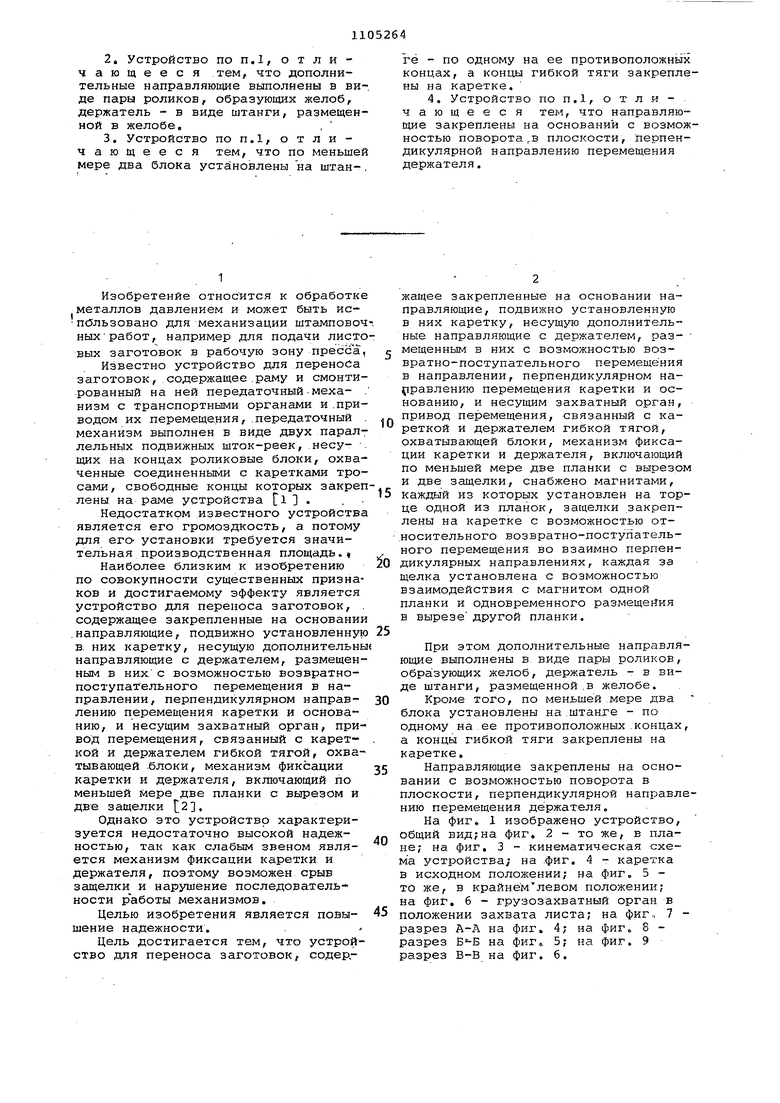

| название | год | авторы | номер документа |
|---|---|---|---|
| Камера для фотосъемки на листовую пленку | 1980 |
|
SU1120275A1 |
| Устройство для упаковывания штучных изделий | 1984 |
|
SU1339051A1 |
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| ЗАМОК РЕМНЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕГО СБОРКИ | 1996 |
|
RU2125396C1 |
| БЛОЧНЫЙ МЕХАНИЗМ ЗАПИРАЮЩЕЙ ЗАЩЕЛКИ | 2006 |
|
RU2362860C1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Регулятор натяжения движущегося материала | 1989 |
|
SU1712294A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для разборки полых цилиндрических изделий | 1990 |
|
SU1794835A1 |

1. УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК, содержащее закрепленные на основании направляющие, подвижно установленную в них каретку, несущую дополнительные направляющие с держателем, размещенным в них с возможностью возвратно-поступательного пе-. ремещения в направлении, перпендикулярном направлению перемещения карет ки и основанию, и несущим захватный орган, привод перемещения, связанный с кареткой и держателем гибкой тягой, охватывающей блоки, механизм фиксации каретки и держателя, включающий по меньщей мере две планки с вырезом и две защелки, отличающееся тем, что, с целью повышения надежности, оно снабжено магнитами, каждый из которых установлен на торце одной из планок, защелки закреплены на каретке с возможностью относительного возвратно-поступательного перемещения во взаимно перпендикулярных направлениях, каждая защелка установ(Л лена с возможностью взаимодействия с магнитом одной планки и одновременного размещения в вырезе другой планки.
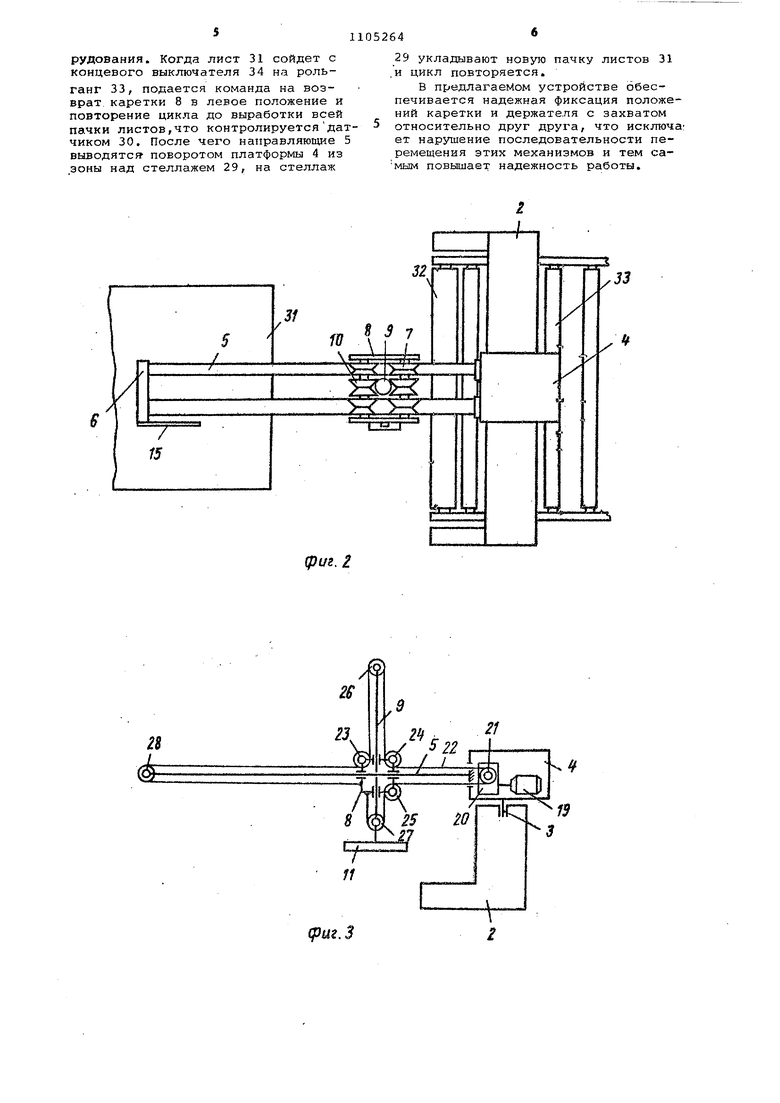
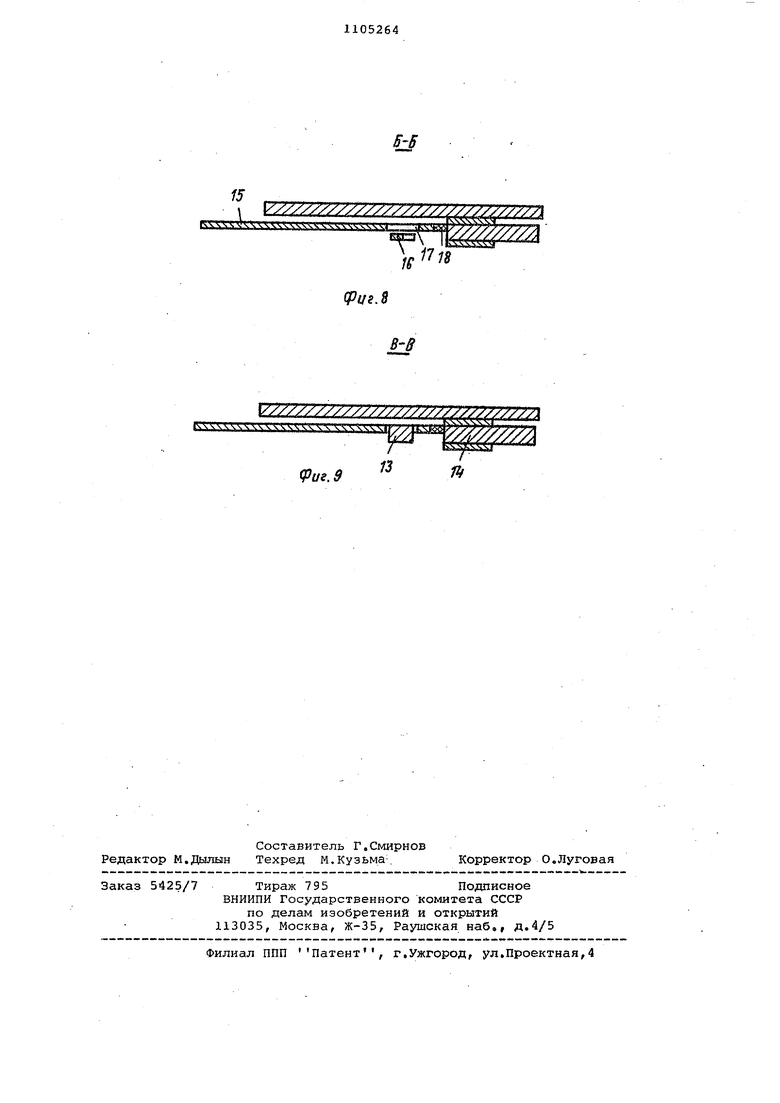
Изобретение относится к обработке металлов давлением и может быть ис пользовано для механизации штамповоч ныхработ, например для подачи листо вых заготовок в рабочую зону пресса Известно устройство для переноса заготовок, содержащее.раму и смонтированный на ней передаточный-механизм с транспортными органами и .приводом их перемещения, .передаточный механизм выполнен в виде двух параллельных подвижных щток-реек, несу- щих на концах роликовые блоки, охваченные соединенными с каретками тросами, свободные концы которых закреп лены на раме устройства Г 3 . Недостатком известного устройства является его громоздкость, а потому для его- установки требуется значительная производственная площадь. Наиболее близким к изобретению по совокупности существенных признаков и достигаемому эффекту является устройство для переноса заготовок, содержащее закрепленные на основании .направляющие, подвижно установленную в. них каретку, несущую дополнительны направляющие с держателем, размещенным в нихс возможностью возвратнопоступательного перемещения в направлении, перпендикулярном направлению перемещения каретки и основанию, и несущим захватный орган, привод перемещения, связанный с кареткой и держателем гибкой тягой, охватывающей .блоки, механизм фиксации каретки и держателя, включающий по меньшей мере две планки с вырезом и две защелки 2. Однако это устройство характеризуется недостаточно высокой надежностью, так как слабым звеном является механизм фиксации каретки и держателя, позтому возможен срыв защелки и нарушение последовательности работы механизмов. Целью изобретения является повышение надежности. Цель достигается тем, что устройство для переноса заготовок, содер,жащее закрепленные на основании направляющие, подвижно установленную в них каретку, несущую дополнительные направляющие с держателем, раз- мещенным в них с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном нарравлению перемещения каретки и основанию, и несущим захватный орган, привод перемещения, связанный с кареткой и держателем гибкой тягой, охватывающей блоки, механизм фиксации каретки и держателя, включающий по меньшей мере две планки с вырезом и две защелки, снабжено магнитами, каждый из которых установлен на торце одной из планок, защелки закреплены на каретке с возможностью от.носительного возвратно-поступательного перемещения во взаимно перпендикулярных направлениях, каждая за щелка установлена с возможностью взаимодействия с магнитом одной планки и одновременного размещения в вырезедругой планки. При этом дополнительные направляющие выполнены в виде пары роликов, образующих желоб, держатель - в виде штанги, размещенной.в желобе. Кроме того, по меньшей.мере два блока установлены на .штанге - по одному на.ее противоположных .концах, а концы гибкой тяги закреплены на каретке. Направляющие закреплены на основании с возможностью поворота в плоскости, перпендикулярной направлению перемещения держателя. На фиг. 1 изображено устройство, общий вид;на фиг. 2 - то же, в плане; на фиг. 3 - кинематическая схема устройства; на .фиг. 4 - каретка в исходном положении; на фиг. 5 то же, в крайнёмлевом положении; на фиг. 6 - грузозахватный орган в положении захвата листа; на фиг,, 7 разрез А-А на фиг. 4; на фиг. 8 разрез Б-Б на фиг, 5; на фиг. 9 разрез В-В на фиг. б.
Устройство содержит смонтированную на основании 1 П-образнуго стойку 2, на которой- на оси 3 установлена платформа 4, имеющая возможность поворота вокруг вертикальной оси. На платформе 4 закреплены две консольные цилиндрические направляющие 5, свободные концы которых соединены поперечиной б. На направляющих 5 на катках 7 установлена каретка 8. В каретке 8 с возможностью перемещения -в направлении, перпендикулярном ее движению, установлен держатель , выполненный в виде цилиндрической штанги 9, размещенной в роликовых направляющих 10 каретки 8 и несущей на торце захват, например вакуумную присоску 11.
Устройство содержит также механизм фиксаи,ии каретки 8 и держателя 9, выполненный в виде установленных в корпусе 12, закрепленном на каретке 8, с возможностью, возвратнопоступательного перемещения во взаимно перпендикулярных направлениях защелок 13 и 14, а также двух замков
15и 16, выполненных в виде планок с прямоугольными вырезами 17, консольно закрепленных одна 15 - на планке 6, а вторая 16 - на держателе 9. Замки 15 и 16 расположены в параллельных вертикальных плоскостях таким образом, что своими торцами могут контактировать с частью торцов защелок 13 и 14, соответственно замок 15 с защелкой 14, а замок
16с защелкой 13, при этом каждая.
из защелок второй частью торца имеет возможност.ь захода в вырез 17 противолежащего 3 амк а.
Защелка 13 входит в вырез 17 замка 15, а защелка 14 - в вырез замка 16
На торцах замков 15 и 16 закреплены постоянные магниты 18, Привод перемещения каретки 8 и держателя 9 выполнен в виде электродвигателя 19.и червячного редуктора 20, на переходнсм валу которого установлена приводная звездочка 21, связанная гибким элементом в виде втулочно-роликовой цепи 22, закрепленной на каретке 8, с холостыми звездочками 23, 24 и 25 а также закрепленными на каретке 8 звездочкагли 26 и 27, расположенными на держателе 9 по обе стороны каретки 8, и звездочкой 28, закрепленной на поперечине 6,
На основании 1 размещен стеллаж 29 с датчиком 30 наличия на нем подаваемых листов 31. Листы 31 подаются в зону технологического оборудования приводными валками 32 и рольгангом 33 с датчиком наличия листа на нем,
Устройство работает следующим образом.
Перед началом работы на платформ 4 с консольными направляющими 5
вручную поворачивают вокруг оси 3 на угол, обеспечивающий цеховому транспорту (не показан) свободную загрузку стеллажа 29 пачкой листов 31. Затем платформу 4 устанавливают в исходное положение, располагая консольные направляющие 5 над пачкой листов 31. В исходном -положении (фиг.4 и 7) каретка 8 размещена в крайнем правом по чертежу положении,
0 а держатель 9 с присоской 11 зафиксированы в крайнем верхнем положении, при этом защелка 14 входит в вырез 17 замка 16,а защелка 13 своим торцом притянута магнитом 18 к торцу замка 16.
Включают электродвигатель 19. Поскольку держатель 9 зафиксирован защелкой 14 неподвижно относительно каретки 8, то при перемещении цепи 22 каретка 8 вместе с держателем 9 начинает.перемещаться влево по чертежу. При подходе каретки 8 в крайнее левое положение, она наезжает на замок 15 (фиг. 5 и 8), который своим торцом выталкивает защелку 14
5 из выреза 17 замка 16. После выхода защелки 14 из выреза 17 замка 16 держатель 9 с присоской 11 и замком 16 начинает опускаться, при этом магнит 18, закрепленный на торце
0 замка 16 заводит защелку 13 в вырез 17 замка 15, фиксируя каретку 8 в крайнем левом положении. При этом цепь 22, перемещаясь, продолжает опускать держатель 9 с присоской 11
5 (фиг. 6,8). При касании присоски 11 верхнего 31 привод отключается от концевого выключателя (не показан) . После создания рабочего разряжения в присоске электродвигатель. 19 переключается на реверс и дер0:сатель 9 с присоской 11 и листом 31 поднимается. При этом замок 16 своим торцом выталкивает защелку 13 из выреза 17 замка 15, каретка 8 начинает перемешаться .вправо и магнит 18, .за5крепленный на торце замка 15, заводит защелку 14 в вырез замка .16. .Таким образом, держатель 9 с присоской 11 фиксируется на каретке 8 в крайнем верхнем положении и каретка 8 подает
0 лист в валки 32.
При больших габаритах листа 31 присоска 11 захватывает лист за его правый конец, а левый конец листа
5 при перемещении каретки 8 вправо
скользит по нижележащему листу. В крайнем правом положении каретки 8 после завода конца листа в валки 32 электродвигатель,19 отключается,
0 а присоска 11 соединяется с атмосферой.
После отключения присоски 11 лис1 валками 32 и рольгангом 33 подается 5 в рабочую зону технологическдго оборудования. Когда лист 31 сойдет с концевого выключателя 34 на рольганг 33, подается команда на возврат каретки 8 в левое положение и повторение цикла до выработки всей пачки листов,что контролируетсядатчиком 30, После чего направляющие 5 выводите поворотом платформы 4 из зоны над стеллажем 29, на стеллаж
29 укладывают новую пачку листов 31
.и цикл повторяется.
В предлагаемом устройстве обеспечивается надежная фиксация положений каретки и держателя с захватом относительно друг друга, что исключа: ет нарушение последовательности перемещения этих механизмов и тем самым повышает надежность работы.
IS 1
(Риг.7
SIi.
(pi/e.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
