а IND
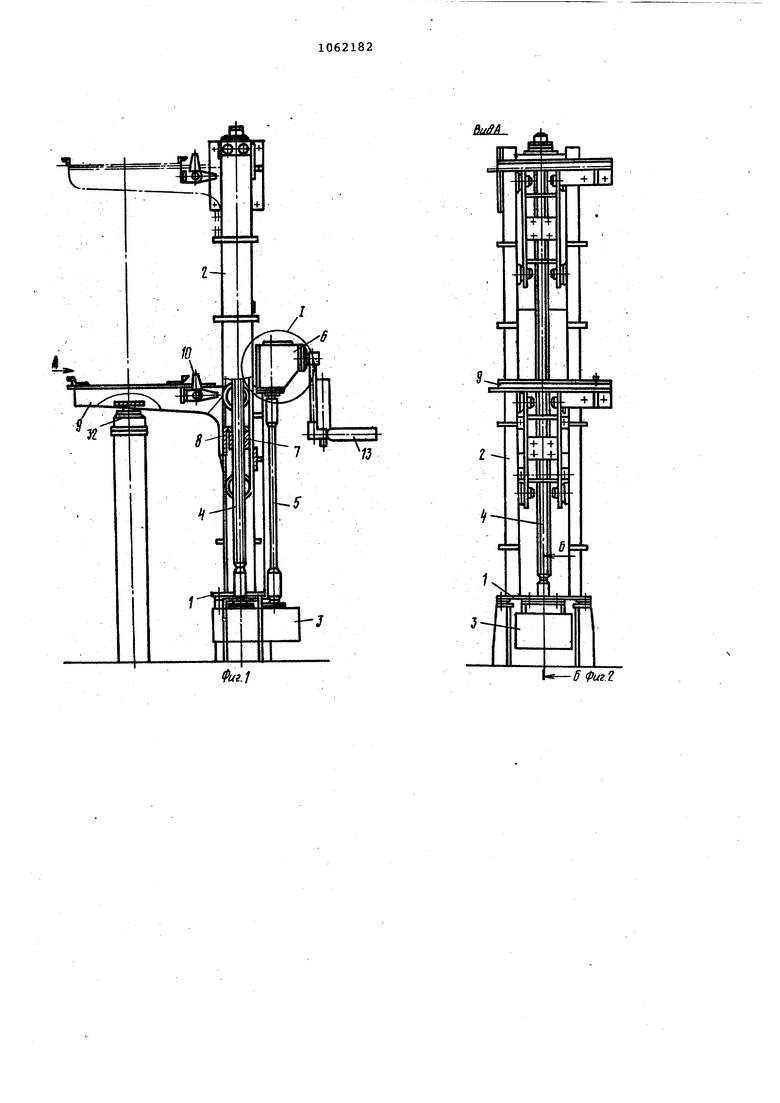
оо to Изобретение относится к подъемным устройствам, в частности к винтовым механическим подъемникам с ручным приводом стационарным или .передвижным, предназначенн,ым для вертикального перемещения контейнеров с грузом, например с уровня одной палубы судна до уровня другой его палубы, устанавливаемым на судах, кораблнх, базовых плавучих средствах флота, а также в. пОмеще«ииях общепромышленного 1 назначения Известен подъемник с ручным.приводом, содержащий опорную раму, несущую стойку, ,на которой с возможностью продольного перемещения смон тирована подъемная площадка и механизм подъёма последней, состоящий из винта и гайки, связанной с площадкой, причем винт взаимосвязан С редуктором, который кйнематически, соединен с рукояткой управлени-я, смонтированной на указанной стойке DIJИзвестный подъемник обладает суще.ственными недостатками: сложноетью конструкции привода механизма подъема, его громоздкостью и больщой массой низкой надежностью работы подъемника за счет возможности поломки его элементов при превьшени максимального момента на рукоятке привода подъема. Целью изобретения является повы, шение надежности устройства. Цель достигается тем, что на подъемнике с ручным приводом, содер жаЩем опорную раму, несущую стойку на которой с возможностью продоль.ногоперемещения смонтирована подъе ная площадка и механизм подъема по следней, состояли из винта и гайк связанной с площадкой, причем винт взаимо.связан с редуктором, который кинематически соединен с рукояткой управления, смонтированной на .стой ке, на входном валу редуктора вы.полней бурт с выемками для взаимодействия с подпружиненными в осево направлении шариками, установленны ми в отверстиях шестерни, причем о верстия выполнены соосными с осью вала и симметрично расположены относительно нее, шестерня опирается своим торцом на. бурт, а выходной вал снабжен муфтой обратного хода. На фиг.1 показан подъемник гру.зовой ручной, общий вид; нафиг.2 вид А на фиг.1; на фиг.З - сечение Б.-Б на фиг.2; на фиг.4 - сечение В-В на фиг.З; на фиг.5 - узел I на фиг.1. Подъемник грузовой ручной содер опорную раму 1, на которой установ лена вертикальная стойка 2, представляющая собой сварную металлоко струкцию. В нижйей части стойки 2 закреплен редуктор 3, который связ с одной стороны с грузовым винтом 4, ас другой стороны через промежуточный вал 5 с УГЛОВОЙ передачей 6. На грузовом винте 4 установлена ходовая гайка 7, которая находится внутри бобышки 8, жестко закрепленной на подъемной площадке 9, подвижной вдоль стойки 2 и снабженной элементами фиксации контейнеров 10. Угловая передача 6 представляет собой конический редуктор, состоящий из корпуса 11 и пары конических шестерен 12, снабженный съемной рукояткой 13 управления (фиг.1) и закрепленный на стойке 2 подъемника на удобной для обслуживания высоте. Редуктор 3 (фиг.З) представляет собой цилиндрический редуктор, содержащий корпус 14, в котором установ.лены входной вал 15 с ведущей шес-терней 16 и выходной вал 17 с ведомым колесом 18. При этом ведущая шестерня 16 установлена на валу 15 на подшипниках 19 скольжения, т.е. с возможностью свободного вращения относительно вала 15, и снабжена рядом сквозных отверстий, выполненных соосньп/и с осью.вала 15 и симметрично расположенными относительно нее. Внутри отверстий шестерни 16 находятся пружины 20 сжатия, опирающиеся через промежуточные элементы 21 на подпружиненные щарики 22, часть поверхности которых находится в в выемках, выполненных в бурте 23, выполненном на валу 15, на который шестерня 16 опирается своим торЦ.ОМ . С противоположного торца шестерни 16 отверстия с пружинами. 20 закрыты проставочными пробками 24. Диск 23 вала 15, шарики 22, пружины 20, а также сама шестерня 16 со сквозными отверстиями являются составными частями ограничителя крутящего момента на рукоятке 13 управления привода механизма подъема. Ведущая шестерня 16 находится в зацеплении с ведомым колесом 18, которое установлено на выходном валу 17 редуктора 3 на подшипниках скольжения 25, т.е. с возможностью свободного врсццения относительно вала 17. На колесе18 жестко закреплена вилка 26, псшьцы которой находятся в пространстве между обоймой 27 и ступицей 28. В этим же пространстве установлены ролики 29, число которых соответствует числу пальцев вилки 26, а. ступица 28 снабжена штифтами 30, подпружиненными пружинами 31. При этом обойма 27 одновременно образует подшипниковую полость опоры одного из концов вала 17, а ступица 28 жестко закреплена на этом же валу 17.
Вал 17 со ступицей 28, роликами 29, штифтами 30 и пружинами ЗГ, а также обойма 27 и колесо 18 с вилкой 26 представляют собой составные части фрикционного тормоза, выполненого по типу муфты обратного хода.
Подъемник работает.следующим образом.
При вращении рукоятки 13 управления в сторону, соответствующую опусканию или поднятию площадки 9 подъемника с контейнером или без него, вращение от нее через шестерни 12 угловой передачи 6 и промежуточный вал 5 передается на входной вал 15 редуктора 3. Вал 15 начинает вращаться и через подпружиненные шарики 22, находящиеся в выемках бурта 23, передает крутящий момент на шестерню 16, которая в свою очередь начинает вращать находящееся с ней В зацеплении зубчатое .колесо 18. Одновременно приходит в движение закрепленная на.колесе 18 вилка 26, которая,- воздействуя своими пальцами на ролики .29, выводит их из заклинки между ступицей 28 и обоймой 27 тем самым.размыкает тормоз и передает крутящий момент через ступицу 28 на выходной вал 17 редуктора 3. .
Выходной вал 17 далее передает крутящий мбМент на грузовой винт 4, врамение которого преобразуется в поступательное движение ходовой гайки 7 и, следовательно, подъемной площадки 9, которая подается на необходимый уровень для дальнейших операций с контейнером.
При oTC yfcTBHH крутя,щего момента на укоят1Гё 13 управления, и, следовательно, на винте 4, последний, под действием находящегося на подъемной- площадке 9 груза (контейнера) , может ;начать произвольное вращение. В этом случае выходной вал 17 и ступица 28 тормоза начинают вращаться вместе с винтом 4. При этом штифты 30, вьадвигаясь под действием пружин 31 из ступицы 28, обеспечивают заклинку роликов 29 между ступицей 28 и обоймой 2.7, таким образом, тормоз за кается и обеспечивает удерживание подъемной площадки 9 с грузом на необходимой высоте.
Если иа рукоятке 13 ручного оривода крутящий момент превысит максимально допустимый, на который настроен ограничитель крутящего момента, диск 23 входного вала 15 редуктора 3 начнет поворачиваться относительно шестерни 16 за счет осевого перемещения подпружиненных шариков 22, в результате, чего крутящий момент на шестерню 16 не передается.
При этам контакт подпружиненных шариков 22 с выемками в бурте 23 вала 15 сопровождается щелчками, сигнализирующими оператору о перегрузке подъемника.
Предлагаемое изобретение имеет 1,о сравнению с лучшим зарубежным образцом :винтового механического подъемника с ручным приводом подъе,ма снабженного тормозными устройствами для надежного удержания подъемной площадки с грузом или б.ез него в поднятом положении, следующие технико-экономические -и Общественно-полезные преимущества: повышается эксплуатационная надежность подъемника за счет исключения поломок его элементов при превышении максимально допустимого крутящего момента на рукоятке управления приводом подъема.
При вращении грузоподъемности подъемника, например, за счет того, что на его подъемную плсмцадку подан контейнер с грузом, вес которого превьвдает допустимый, либо при зацеплении его подъемной площадки (или самого контейнера) за посторонний предмет,, находящийся на пути ее движения, оператор не,может создать на рукоятке ручного привода крутящий момент, который бы превысил максимально допустимый., на который настроен ограничитель крутящего момента, так как в редукторе с тормозом будет происходит проворачивание входного вала относительно ведущей шестерни без передачи на последнюю крутящего момента, т.е. рукоятка привода будет вращаться вхолостую.
Следовательно, каких-либо поломок элементов подъемника по указанной причине происходить не будет. Кроме того, щелчки шариков ограничителя крутящего момента обратят внимание оператора иа перегрузку под-ьемника.
Упрощается конструкция привода ;механизма подъема, обеспечивается его компактность и снижается масса.
RuAA
S Фиг.г

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОВОРОТА | 2006 |
|
RU2323153C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Лебедка | 1986 |
|
SU1370058A1 |
| Ручной привод грузоподъемного устройства | 1982 |
|
SU1105450A1 |
| Устройство для подъема и перемещения транспортного средства | 1987 |
|
SU1491805A1 |
| СПОСОБ ЛАБОРАТОРНОГО ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ПЛОТНОСТИ ГРУНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328718C2 |
| Подъемник для автомобилей | 1980 |
|
SU933633A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |

ПОДЪЕМНИК С РУЧНЫМ ПРИВОДОМ, содержащий опорную раму, несущую стойку, на которой с возможностью продольного перемещения смон-; тирована подъемная площадка и механизм йодъема последней, состоящий из винта и гайки, связанной с площадкой, причем винт взаимосвязан с редуктором, который кинематически соединен с рукояткой управления, смонтированной на стойке, о тлич ающийс я тем, что, с целью повышения нгщежности устройства, на входном валу редуктора выполнен бурт с выемками для взаимодействия с подпружиненными в осевом направлении шариками, установленными в отверстиях шестерни, причем отверстия выполнены соосными с осью вала и симметрично расположены относительно нее, шестерня опирается своим торцом на бурт, а выходной вал снабжен муфтой обратного хода.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3195743, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
