Изобретение относится к области землеройного машиностроения, в частности к экскаваторам, предназначенным для вскрытия трубопроводов, например газо- и нефтепроводов, уложенных в грунт.
Известны экскаваторы такого назначения, снабженные системой управления с трассоискателем, способным обнаруживать трубу в грунте и определять трассу вскрышных работ 1.
Однако такая система управления не решает задачу управления экскаватором на криволинейных участках трубопровода. В то же время проведение земляных работ, в особенности на действуюш,их трубопроводах, связано с особыми требованиями к технике безопасности и охране окружающей среды. Поэтому к системе управления положением рабочего органа относительно поперечного сечения трубы предъявляются жесткие требования.
Наиболее близким по технической сущности к изобретению является устройство, содержащее тягач, связанный посредством вертикального шарнира с полуприцепным рабочим органом, датчик бокового смещения рабочего органа относительно трубы, соединенный с индикатором бокового смещения 2.
Устройство указывает оператору только текущее значение бокового смещения рабочего органа.относительно трубы, но он не знает истинного курса тягача и полуприцепного рабочего органа, которые связаны вертикальным шарниром. Указатель не дает возможности правильно ориентировать весь поезд относительно, продольной оси трубы, если она не прямая. Поэтому использование данного устройства приводит к ведению экскаватора по извилистой траектории относительно трубы, повышенной нагрузке на элементы системы управления и высокой нервной и физической нагрузке оператора, а главное не исключает поломок и аварий из-за отклонений рабочего органа, превосходящих предельно допустимые. Кроме того, для автоматизации процесса управления недостаточно данных только о боковом смещении рабочего органа относительно трубы. На криволинейных участках оператор (или система автоматизации) должен как бы прогнозировать кривизну трубы и вводить необходимое упреждение при повороте поезда. При этом естественно возможной и в то же время вполне обоснованной предпосылкой для наиболее точного управления экскаватором при вскрытии криволинейных участков трубопровода является то, что трубопровод на еще не вскрытом участке имеет ту же кривизну, что и на вскрытом. Очевидно, реализация этого принципа равносильна управлению тягачом по курсу таКИМ образом, чтобы он перемещался все время параллельно касательной к трубе в каждой точке копания. Условие правильности ведения тягача может быть сформулировано так: проекция скорости тягача на перпендикуляр к продольной оси рабочего органа должна быть равна боковой составляющей скорости этого рабочего органа С обратным знаком.
Цель изобретения - улучшение управляемости экскаватора при вскрытии криволинейных участков трубопровода.
Указанная цель достигается тем, что экскаватор для вскрытия трубопроводов, включающий тягач, связанный посредством вертикального шарнира с полуприиепным рабочим органом, датчик бокового смещения рабочего органа относительно трубы, соединенный с индикатором бокового смещения, снабжен индикатором курса, блоком выделения боковой составляющей скорости тягача, сумматором, дифференцирующим звеном и датчиком скорости, выход которо.fo через блок выделения боковой составляющей скорости тягача соединен с первым входом сумматора, при этом выход датчика бокового смещения рабочего органа относительно трубы через дифференцирующее звено соединен с вторым входом сумматора, а выход сумматора подключен к входу индикатора курса.
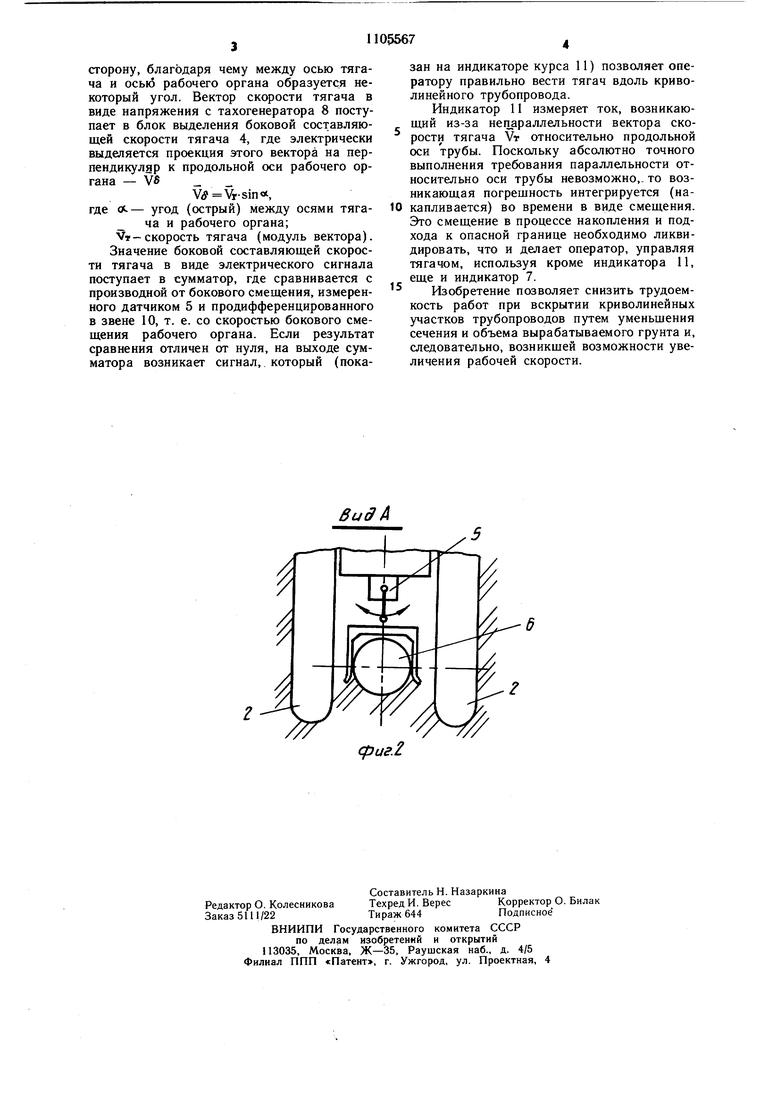
На фиг. 1 представлена функциональная схема экскаватора для вскрытия трубопроводов; на фиг. 2 - схема установки датчика бокового смещения (вид по стрелке А на фиг. 1).
Устройство содержит тягач 1 с полуприцепным рабочим органом 2. На вертикальном шарнире 3, соединяющем тягач 1 с рабочим органом 2, размещен блок 4 выделения боковой составляющей скорости тягача (например, синусный потенциометр). На рабочем органе 2 установлен датчик 5 бокового смещения рабочего органа относительно трубы б, связанный с индикатором бокового смещения 7, установленным в кабине тягача. Тягач снабжен датчиком скорости 8, например тахогенератором, который связан через блок выделения боковой составляющей скорости тягача с входом сумматора 9. Другой вход сумматора 9 связан с датчиком бокового смещения 5 через дифференцирующее звено 10. Ёыход сумматора 9 соединен с расположенным в кабине тягача индикатором курса И.
Устройство работает следующим образом.
При отклонении вскрываемого трубопровода 6 от прямой линии происходит смещение оси рабочего органа вбок от оси трубы, которое измеряется датчиком 5 бокового смещения. Сигнал об этом поступает на индикатор смещения 7. Если оператор управляет экскаватором по индикатору 11, то он добивается параллельности продольной оси тягача относительно трубы. Оператор для компенсации этого смещения начинает поворот тягача в противоположную
сторону, благодаря чему между осью тягача и осью рабочего органа образуетс я некоторый угол. Вектор скорости тягача в виде напряжения с тахогенератора 8 поступает в блок выделения боковой составляющей скорости тягача 4, где электрически выделяется проекция этого вектора на перпендикуляр к продольной оси рабочего органа - ve
V(, где ot- угод (острый) между осями тяга ча и рабочего органа;
VT-скорость тягача (модуль вектора). Значение боковой составляющей скорости тягача в виде электрического сигнала поступает в сумматор, где сравнивается с производной от бокового смещения, измеренного датчиком 5 и продифференцированного в звене 10, т. е. со скоростью бокового смещения рабочего органа. Если результат сравнения отличен от нуля, на выходе сумматора возникает сигнал, который (показан на индикаторе курса 11) позволяет оператору правильно вести тягач вдоль криволинейного трубопровода.
Индикатор 11 измеряет ток, возникающий из-за непараллельности вектора скорости тягача VT относительно продольной оси трубы. Поскольку абсолютно точного выполнения требования параллельности относительно оси трубы невозможно,- то возникающая погрешность интегрируется (накапливается) во времени в виде смещения. Это смещение в процессе накопления и подхода к опасной границе необходимо ликвидировать, что и делает оператор, управляя тягачом, используя кроме индикатора 11, еще и индикатор 7.
Изобретение позволяет снизить трудоемкость работ при вскрытии криволинейных участков трубопроводов путем уменьшения сечения и объема вырабатываемого грунта и, следовательно, возникшей возможности увеличения рабочей скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля за положением рабочего органа для вскрытия трубопровода | 1982 |
|
SU1105568A1 |
| РОТОРНЫЙ ТРАНШЕЙНЫЙ ЭКСКАВАТОР | 1993 |
|
RU2035550C1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |
| МАШИНА ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДА И РАБОЧИЙ ОРГАН | 1997 |
|
RU2112841C1 |
| АГРЕГАТ ДЛЯ ВСКРЫТИЯ, ПОДКОПА И УДАЛЕНИЯ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 1992 |
|
RU2034960C1 |
| Роторный экскаватор для вскрытия трубопровода | 1981 |
|
SU968216A1 |
| Устройство для навески рабочего органа роторного экскаватора | 1975 |
|
SU692945A1 |
| Землеройная машина для вскрытия трубопроводов | 1979 |
|
SU887740A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| УСТРОЙСТВО РАЗРАБОТКИ ГРУНТА ИЗ-ПОД ТРУБОПРОВОДА | 2000 |
|
RU2252302C2 |
ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ, включающий тягач, связанный посредством вертикального шарнира с полуприцепным рабочим органом, датчик бокового смеш,ения рабочего органа относительно трубы, соединенный с индикатором бокового смеш,ения, отличающийся тем, что, с целью улучшения управляемости экскаватора при вскрытии криволинейных участков трубопровода, экскаватор снабжен индикатором курса, блоком выделения боковой составляющей скорости тягача, сумматором, дифференцирующим звеном и датчиком скорости, выход которого через блок выделения боковой составляющей скорости тягача соединен с первым входом сумматора, при этом выход датчика бокового смещения рабочего органа относительно трубы через дифференцирующее звено соединен с вторым входом сумматора, а выход сумматора подключен к входу индикатора курса. (Л ел сд О5 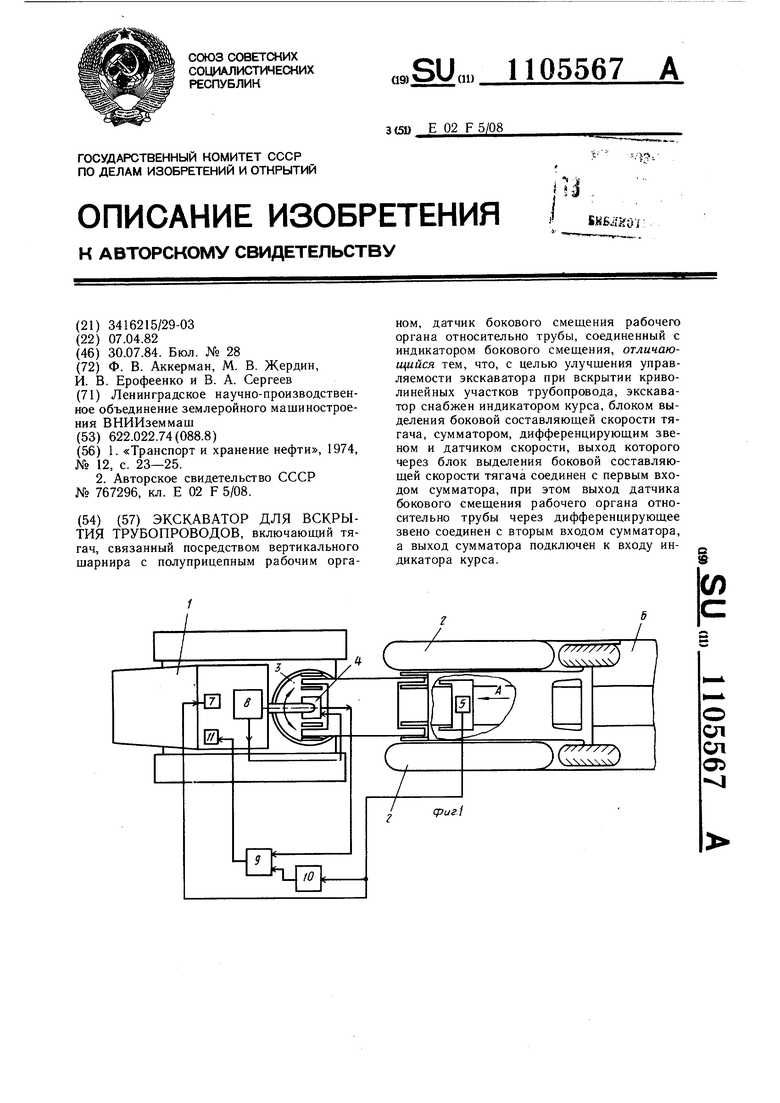
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| «Транспорт и хранение нефти, 1974, № 12, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для вскрытия уложенного в грунт трубопровода | 1976 |
|
SU767296A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
