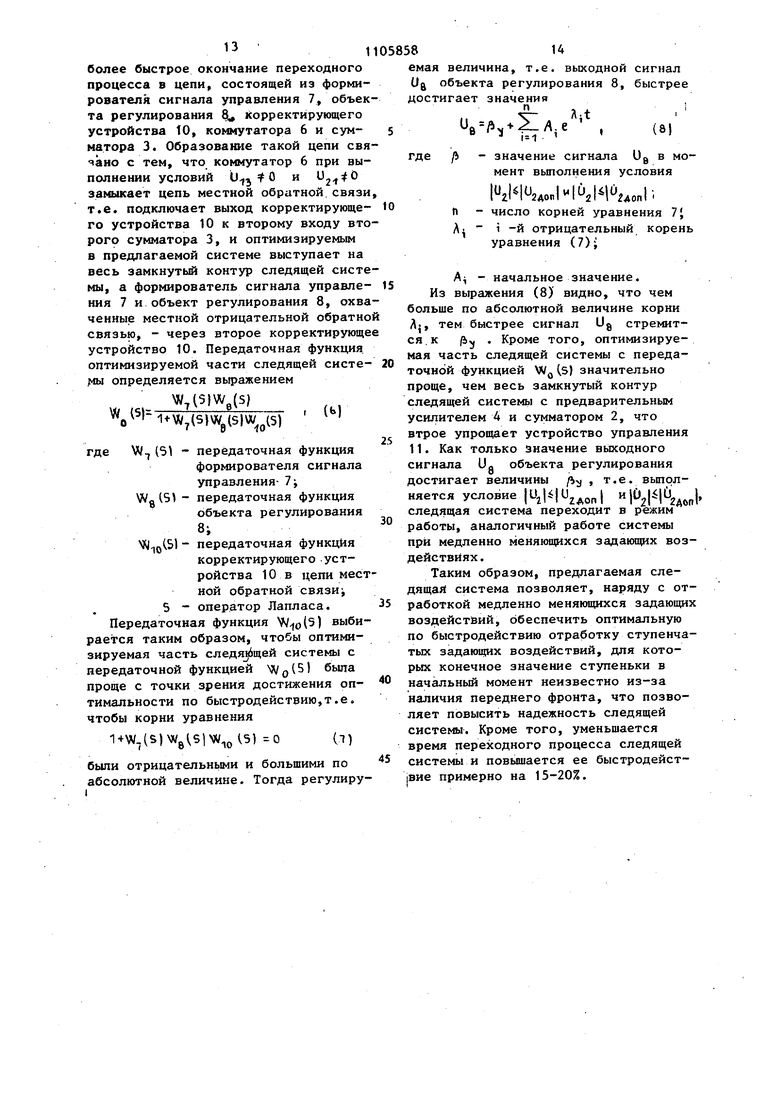
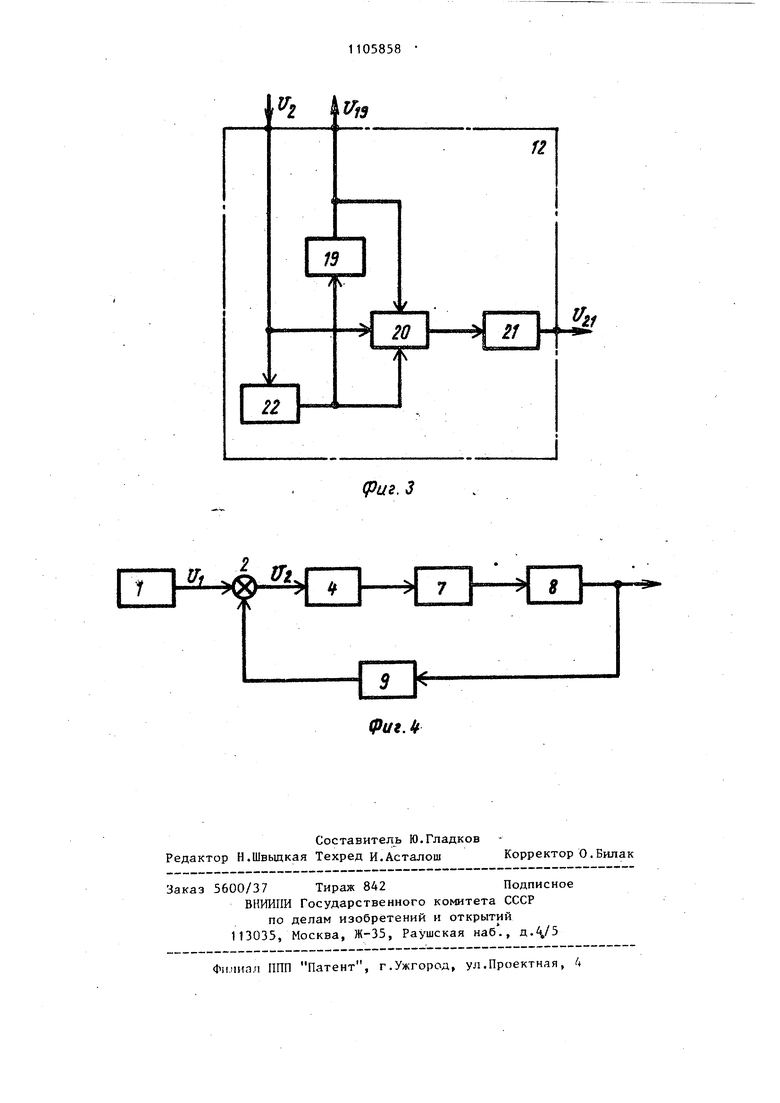
Изобретение относится к следящим системам, на вход которых поступают медленно меняюоц1еся, быстро нарастающие и ступенчатые задающие .воздейст вия с различной крутизной переднего фронта, и может быть использовано в машиностроении и химико-технологИчес кой промьпиленности. Известна следящая система, содержащая последовательно соединенные за датчик, первый сумматор, усилитель, второй сумматор, первый коммутатор, третий сумматор, формирователь сигнала управления и объект регулирования, выход Которого Через последовательно включенные первое корректирующее устройство и второй коммутатор соединен с вторым входом третьего сумматора, а через блок главной обратной связи - с вторым входом перво го сумматора, первый вход которого через последовательно соединенные второе корректирующее устройство и третий коммутатор соединен с вторым входом второго сумматора, управляющие входы коммутаторов соединены с соответствую1дими выходами блока управления, в качестве которого применяются различного рода нелинейные корректируютцие устройства. В таких следящих системах дополнительно вводится управляющая связь по входному воздействию в виде корректирующего звена, формирующего производные по входному воздействию для повышения порядка астатизма системы 13Недостатком известной системы является ее низкое быстродействие при медленно меняющихся задающих воз действиях. Известна также следящая система, обладающая повышенной точностью и быстродействием в переходных режимах при отработке ступенчатых входных воздействий различной амплитуды. Эта система содержит последовательно соединенные злемент сравнения, предварительньй усилитель, сумматор, исполнительный блок и объект, охваченный цепью единичной обратной связи, причем один из выходов элемента сравнения соединен с внешним источником управляющего воздействия, а также устройство управления, первы вход которого также соединен с внешним источником управляющего воздействия, второй вход - с выходом элемента сравнения, а выход соединен с вторым входом сумматора. В состав устройства управления известной системы входят два мультивибратора с отрицательным выходным импульсом, два мультивибратора с положительным выходным импульсом, блок селекторов и ключ, при этом вход системы через ключ связан с первым входом блока селекторов, через последовательно соединенные мультивибратор с отрицательным выходным импульсом и мультивибратор с положительным выходным импульсом связан с вторым входом блока селекторов, а через другие последовательно соединенные мультивибратор с положительным выходным импульсом и мультивибратор с отрицательным выходным импульсом связан с входом (третьим) блока селекторов, выход которого подключен к входу сумматора, а четвертый и пятьш входы к общим клеммам соответствующей пары мультивибраторов, причем вход предварительного усилителя соединен с блоком селекторов через упомянутый ключ 123. Недостатком этой системы является .низкая точность при ступенчатом задающем воздействии, что значительно снижает область ее применения,т.е. позволяет применять известную систему только в машиностроении. Наиболее близкой к изобретению по технической сущности является следящая система, содержащая последовательно соединенные задатчик, первый сумматор, усилитель, второй сумматор, первый коммутатор, третий сумматор и формирователь сигнала управления, выход которого через последовательно включенные первое корректирующее устройство и второй коммутатор соединен с вторым входом третьего сумматора, а через блок главной обратной связи - с втррым входом первого сумматора, выход которого соединен с первым входом устройства управления, вторым входом соединено с выходом задатчика и входом второго корректирующего устройства,а первым выходом с третьим входом третьего сумматора,а вторым выходом - с управляющими входами первого и второго коммутаторов, а выход второго корректирующего устройства соединен с вюрым входом второго сумматора, причем в состав устройства управления известной системы входят два мультивибратора с отрицательным выходным импульсом, два муль тивибратора с положительным выходным импульсом,селектор и ключ, при этом выход первого сумматора системы через ключ связан с первым входом блока селекторов, через последовател но соединенные пе1)вый мультивибратор с отрицательным выходным импульсом и первый мультивибратор с положительным выходным импульсом связан с вторым входом селектора, а через последовательно соединенные второй мульти вибратор с положительным выходным импульсом и второй мультивибратор с отрицательным выходным импульсом свя зан с третьим входом селектора, первый выход которого подключен к третьему входу третьего сумматора систе мы, а четвертый и пятьш входы - к общим клеммам соответствующей пары мультивибраторов, причем выход ключа соединен с управляющими входами первого и второго коммутаторов 3 J. Известная система обеспечивает достаточную точность и быстродействи при отработке медленно меняющихся и ступенчатых задак)щих воздействий. Для отработки ступенчатых входных воздействий в ней вырабатываются кор ректирующие импульсы, последовательность и длительность которых определяются свойствами, объекта регулирова ния и амплитудой ступеньки входного сигнала. Однако ступенчатые входные сигналы обычно имеют определенной длительности передний фронт. В этом случае в начальньй момент нарастания входного сигнала нельзя определить конечную амплитуду ступеньки и выработат.ь требуемую последовательност корректирующих импульсов, что вносит неопределенность в работу следящей системы, снижая тем самым надежность системы. Кроме того, известная система обладает низким быстродействием при отработке быстро нарастающих задающих воздействий. Целью изобретения является повышение быстродействия системы. Поставленная цель достигается тем, что в следящей системе, содержащей первое корректирующее устройст во и последовательно соединенные задатчик, первый сумматор, усилитель, первый коммутатор, второй сумматор и формирователь сигнала управления, выходом подключенный к входу объекта регулирования, выходом подключенного через последовательно соединенные второе корректирующее устройство и второй коммутатор к второму входу второго сумматора, а через блок главной обратной связи - к второму входу первого сумматора, выходом соединенного с первым входом устройства управления, первым выходом соединенного с третьим входом второго сумматора, а вторым выходом - с управляющим входом первого коммутатора и первым управляющим входом второго коммутатора, вход второго корректирующего устройства соединен с выходом первого,сумматора, первый выход с четвертым входом второго сумматора и с вторым управляющим входом второго коммутатора, а второй выход - с вторым входом первого корректирующего устройства. На фиг.1 представлена блок-схема следящей системы; на фиг.2 - то же, устройства управления; на фиг.З то же, первого корректирующего устройства; на фиг.4 - то же, системы в установившемся режиме. На фигурахприняты следующие обозначения: задатчик 1, первый 2 и второй 3 сумматоры, усилитель 4, первьй 5 и второй 6 коммутаторы, формирователь сигнала управления 7, объект регулирования 8, блок главной обратной связи 9, второе корректирующее устройство 10, устройство управления 11,первое корректирующее устройство 12,ключ 13, селектор 14, первый, второй, третий, четвертый мультивибраторы соответственно 15, 16, 17, 18 ,нуль-орган 19, логический блок 20, релейный блок 21, дифференциатор 22, и - сигнал на выходе i-ro функционального блока. Устройство управления 11 представляет собой нелинейное устройство, в состав которого входя.т ключ 13, селектор 14, мультивибратор 15, генерирующий положительный импульс при положительном скачке сигнала U , мультивибратор 16, генерирующий отрицательный импульс при положительном скачке сигнала U, , мультивибратор 17, генерирующий импульс отрицательной полярности при отрицатель-. ном скачке сигнала U, мультивибратор IBs генерирующий импульс положительной полярности при отрицательном скачке U,. 511 Второе корректирующее устройство также представляет собой нелинейное устройство, S состав которого входят нуль-орган 19, об спечиваклдий формирование импульса при значениипроизводной сигнала Uj равной нулю, дифференциатор 22, производную сигнала Uj , логический блок 20, формирующий положительный и№1ульс .в зависимости от условий, накладьгоаемых на величины сигнала Uj и его производной, релейчьй блок 21, вырабатывающий корректирующий сигнал U положительной или отрицательной полярности. Данная следящая система реализует следующий закон регулирования: К + С , (11 где у - управляющий сигнал; Е - сигнал рассогласования; С - постоянный сигналJ К - коэффидаент передачи системы, причем величина коэффициента передач системы К изменяется в зависимости от величины сигнала рассогласования ЕЙ его первой производной . Коэф фициент передачи К может принимать три значения, соответствующих режимам работы системы при медлейно меняющихся задающих воздействиях, быстро нарастающих фронтах скачкообразных задающих воздействий и собственно скачкообразном задающем воздействии. При наличии быстро нараста ющих фронтов скачкообразных задающих воздействий быстродействие близкое к оптимальному в предлагаемой системе обеспечивается за счет изменения величины коэффициента передачи 4 и величины постоянного сигнала С в законе управления (1) в зависимости от условий, накладываемых на значени сигнала рассогласования и его первой производной Е . Изменение вели чин коэффициента передачи К и постоянного сигнала С в системе осуществляется с помощью устройства управле ния П, первого корректирующего устройства 12 и коммутаторов 5 и 6. Алгоритм работы логического блока 20 первого корректирующего устройств 12. т.е. зависимость его выходного сигнала Ujo от трех его входных сиги имеет следующий г 2 8 ро.есди 1и,.,„„|и|и |и „ (V° °} + 1.ес.и(, Ц,0) или(С ) V-V () Управляющий импульсный сигнал , формируемый в момент выполнения усявляется кратковрекенным. Длительность и амплитуда импульса сигнала U. выбираются так, чтобы обеспечить срабатывание конструктивных элементов, применяемых при построении системы, В момент включения системы в работу, т.е. когда , и 02 0 , устройство управления 11 и первое корректирующее устройство 12 выключены, так как сигналы на их выходах равны нулю. При изменении состояния системы ервое корректирующее устройство 2 включается в работу при выполнении едующих условий: W и 0) и и и 19 / . V-)i (-UzAon V V-°l ( э «устройство управления 11 при вылнении следующих условий: lUahiU Алгоритм работы коммутатора 5,т.е. висимость его выходного сигнала двух его входных сигналов U и U. еет следующий вид: и если О если и, 0 Алгоритм работы второго коммутато6, т.е. зависимость его выходного гнала Uj, от трех его входных сигна 22 -10 имеет следующий о, если ( 21° и . и если Ф О . 10 3 С помощью первого коммутатора 5 ключается выход усилителя 4 от вхрда сумматора 3, чем исключается влияние сигнала ошибки U2 на сигнал Ц. т.е. импульсы сигнала О на различных интервалах управления становятся одинаковыми по амплитуде. Второе корректирующее устройство 10 представляет из себя линейное корректирующее звено, связь между входным и выходным сигналами которого имеет следукнций вид: (5lUg(S) , где Ug(S) - преобразование Лапласа выходного сигнала объекта регулирования 8; (S) - преобразование Лапласа выходного сигнала второго корректирующего устройства 10; 1( (3) - передаточная функция второго корректирующего устройства 10; 5 - оператор Лапласа. Передаточная функция СЬ) выбирается таким образом, чтобы оптимизи руемая часть следящей системы с пере даточной функцией W 151-- I lb ,(5)WJ5) (Щ,(} где W ( S) - передаточная функция формирователя сигнала управления 7, V/g(S) - передаточная функция объекта регулирования 8, была проще с точки зрения оптимальности по быстродействию, т.е. чтобы корни уравнения ((SIW(5) 0 были отрицательными и большими по аб солютной величине. Входными сигналами устройства управления 11 являются сигналы U2 и Ц , а выходными - сигналы U и U. Связь между ними определяется в вид J1, если1и2| 1и.,д,„| ии, 10, в противном случае. Входным сигналом первого корректиру ющего устройства 12 является сигнал U2, а выходными - сигналы U и U Связь между ними определяется в виде1, если 10, если Выходной сигнал (J, соответствует знаку сигнала , т.е.0,5(50и 0 . Система работает следукицим образом. При медленно меняющихся входных воздействиях U, , когда величины сигнала ошибки системы и ее производной ограничены допусками|и2| и2 .р , l l lAenl логического блока 20, предлагаемая система работает без участия первого и второго корректирующих устройств 10, 12 и устройства управления 11, как обынная система (фиг.4), обеспечивая высокую точность воспроизведения сигнала Ц . При медленно меняющемся выходном сигнале U задатчика 1 выходной сигнал и первого сумматора 2 через вход второго корректирукяцего устройства ,12 поступает на вход дифференциатора 22 и третий вход логического блока .20. С выхода дифференциатора 22 сигнал Ujj , пропорциональный производной выходного сигнала U сумматора 2 поступает на входы нуль-органа 19 и первый вход логического блока 20. Если значения выходного сигнала Uj первого сумматора 2 и его производной U2 удовлетворяют условию 1игНСа1-Чи.|ЯО,,„|-. « 2Аоо 2АОП « которые допустимые значения, определяющие границы области на фазовой плоскости и„ и Uj , независимо от того, поступает с нуль-органа 19 управляниций импульс сигнала , который формируется при вьшолнении условия 0,, 0 , на второй вход логического блока 20 или нет, последний формирует на своем выходе логический ноль, т.е. и О . Тем самым при отмеченных условиях исключается из работы системы второе корректирующее устройство .12, потому что на его первом выходе формируется сигнал (Jj 0 . Если в зтих условиях на выходе нуль-органа 19 формируется импульс сигнала Ц , то он поступает через второй выход первого корректирующего устройства регулирования обеспечивает в системе максимальную эффективность использования управляющего воздействия, направленного на ликвидацию ошибки системы. Длительности корректирукмцего импульсного сигнала U2-, и импульсно го сигнала, формируемого логическим блоком 20, равны. Их длительность определяется изменением по закону регулирования (3) величин выходного сигнала (J первого сумматора 2 его производной U- . Как только выполняется условие И21Яи,,„1 . U,--0 21 1 гАОП1 - 2 - с выхода нуль-органа 19 импульсный сигнал поступает на второй вход логического блока 20, который прекра щает формирование выходного импульсного сигнала Uj , Этим определяется окончание корректирующего импульсного сигнала Uj и выключение первого корректирующего устройства 12. При вьтолнении условия (4) система, переходит в описанный режим работ при медленно меняющихся входных воздействиях. При выполнении условия (5) система включается в режим отработки ступенчатого задакнцего воздействия. В этом режиме с выхода нуль-органа 1 поступает импульсный сигнал через второй выход первого корректирующего устройства 12 на вторые входы первого 15,третьего 17 мультивибраторов и ключа 13 устройства управления 11. -Ключ 13 имеет два входа, на первый из которых в рассматриваемом режиме поступает выходной сигнал U сумматора 2, причем (U | |U,nl, а на второй - импульсный сигнал U. На выходе ключа 13 вьфабатывается импульсный сигнал 0, для селектора 14. Длительность импульсного сигнала U, на входе ключа 13 определяется переходным процессом в системе, временем от момента начала работы уст. ройства управления 11, когда выполнено условие (5), и до момента, когда |(JiU|U2 onl . Селектор 14 имеет пять входов и один выход. На его первый вход поступает импульсный сигнал с выход ключа 13, на остальные входы - сигна лы с выходов четырех мультивибраторов 15-18. В селекторе 14, состоящем из четырех униполярных диодных мажоритарных элементов, сигналы с выходов мультивибраторов 15-18 модулируются по амплитуде в зависимости от величины выходного сигнала (J первого сумматора, соответствукмцего скачку задающего воздействия. В момент выполнения условия (5) на выходе ключа 13 формируется импульсный сигнал U , по длительности пропорциональный амплитуде выходного сигнала Uj первого сумматора 2, и подается на первый вход селектора 14. Одновременно с этим, например, для положительного скачка задающего воздействия при наличии сигналов и и U, мультивибратор 15 формирует импульсный сигнал положительной полярности, которы поступает на селектор 14. Там он модулируется по амплитуде в зависимости от величины выходного сигнала первого сумматора 2, соответствующего скачка задающего воздействия. С выхода селектора 14 модулированный импульсный сигнал и через первый выход устройства управления 11, сумматор 3 и формирователь сигнала управления 7 поступает на вход объекта управления 8.Длительность одного импульса модулированного импульсного сигнала U равна или больще половины длительности одного импульса импульсного сигнала , Импульс выходного сигнала ( мультивибратора 15 своим задним фронтом запускает мультивибратор 16, на выходе которого формируется импульсный сигнал U . Этот сигнал (J, через селектор 14 также поступает в замкнутый контур регулирований следящей системы.Мультивибраторы 17 и 18 служат для коррекции переходных процессов в системе при отрицательных скачках задающего воздействия. Кроме того, импульсный сигнал и.| с выхода ключа 13 через второй выход устройства управления 11 поступает на управляющие входы коммутаторов 5 и 6. С помощью коммутатора 5 отключается выход усилителя 4 от первого входа второго сумматора 3, чем исключается влияние выходного сигнала U первого сумматора 2, усиленного усилителем 4, на импульсный сигнал U, . Это приводит к тому, что импульсы сигнала U.. в различные моменты времени работы системы становятся одинаковыми по амплитуде, что в свою очередь обеспечивает более быстрое окончание переходного процесса в цепи, состоящей из формирователя сигнала управления 7, объек та регулирования корректирующего устройства to, коммутатора 6 и сумматора 3. Образование такой цепи свя чано с тем, что коммутатор 6 при выи, полнении условий замыкает цепь местной обратной связи т.е. подключает выход корректирующего устройства 10 к второму входу вто рого сумматора 3, и оптимизируемым в предлагаемой системе выступает на весь замкнутый контур следящей систе мы, а формирователь сигнала управления 7 и объект регулирования 8, охва ченные местной отрицательной обратно связью, - через второе корректирующе устройство 10. Передаточная функция оптимизируемой части следящей систе 4ы определяется выражением WT(S)W(S) ,(S}WJS|W (5) W (51 - передаточная функция формирователя сигнала управления- 7; Wg(51 - передаточная функция объекта регулирования 8i (.Sl - передаточная функция корректирующего устройства 10 в цепи мест ной обратной связиi 5 - оператор Лапласа. Передаточная функция )o(5) выбирается таким образом, чтобы оптимизируемая часть следя щей системы с передаточной функцией (5) была проще с точки зрения достижения оптимальности по быстродействию,т.е. чтобы корни уравнения ,(S),i5) 0 были отрицательньии и большими по абсолютной величине. Тогда регулируемая величина, т.е. выходной сигнал Ug объекта регулирования 8, быстрее достигает значения п А е -значение сигнала Ug в момент выполнения условия NH AonlHUj U.onl; -число корней уравнения 7, i -и отрицательный корень уравнения (7); А - начальное значение. Из выражения (8) видно, что чем больше по абсолютной величине корни Л, тем быстрее сигнал Ug стремится, к /i) . Кроме того, оптимизируемая часть следящей системы с передаточной функцией Wjj (s) значительно проще, чем весь замкнутый контур следящей системь с предварительным усилителем 4 и сумматором 2, что втрое упрощает устройство управления 11. Как только значение выходного сигнала Ug объекта регулирования достигает величины /i) т.е. выполняется условие |и,) |, следящая система переходит в режим работы, аналогичный работе системы при медленно меняющихся задающих воздействиях. Таким образом, предлагаемая следящая система позволяет, наряду с отработкой медленно меняющихся задающих воздействий, обеспечить оптимальную по быстродействию отработку ступенчатых задающих воздействий, для которых конечное значение ступеньки в начальный момент неизвестно из-за наличия переднего фронта, что позволяет повысить надежность следящей системы. Кроме того, уменьшается время переходного процесса следящей системы и повышается ее быстродейст|Вие примерно на 15-20%.
13
fl3
11
i
/«





| название | год | авторы | номер документа |
|---|---|---|---|
| Следящаяя система | 1979 |
|
SU857926A1 |
| Следящая система | 1979 |
|
SU826269A2 |
| Устройство для управления преобразователем частоты со звеном постоянного тока | 1986 |
|
SU1525841A1 |
| Следящая система | 1977 |
|
SU714351A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU328424A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Усилитель | 1977 |
|
SU743164A1 |
| Способ регулирования тока нагрузки вентильного преобразователя | 1987 |
|
SU1427525A1 |

СЛЕДЯЩАЯ СИСТЕМА, содержащая первое корректирующее устройство и . последовательно соединенные задатчик, первый сумматор, усилитель, первый коммутатор, второй сумматор и формирователь сигнала управления, выходом подключенный к входу объекта регулирования, выходом подключенного через последовательно соединенные второе корректирукицее устройство и второй коммутатор к второму входу второго сумматора, а через блок главной об- , ратной связи - к второму входу первого сумматора, выходом соединенного с первым входом устройства управления, первым выходом соединенного с третьим входом второго сумматора, а вторым выходом - с управляющим входом первого коммутатора и первым управляю1Ц|{м входом второго коммутатора, отличающаяся тем, что, с целью повышения быстродействия системы, в ней вход второго корректирующего устройства соединен с выходом первого сумматора, первый В выход - с четвертым входом второго сумматора и с вторьм управляющим входом второго коммутатора, второй вьцсод - с вторьм входом первого кор ректирующего устройства. g 
16
17 -
Vz . 2
18
г Щз
(риг.З
to
фиг. If
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 689897, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
