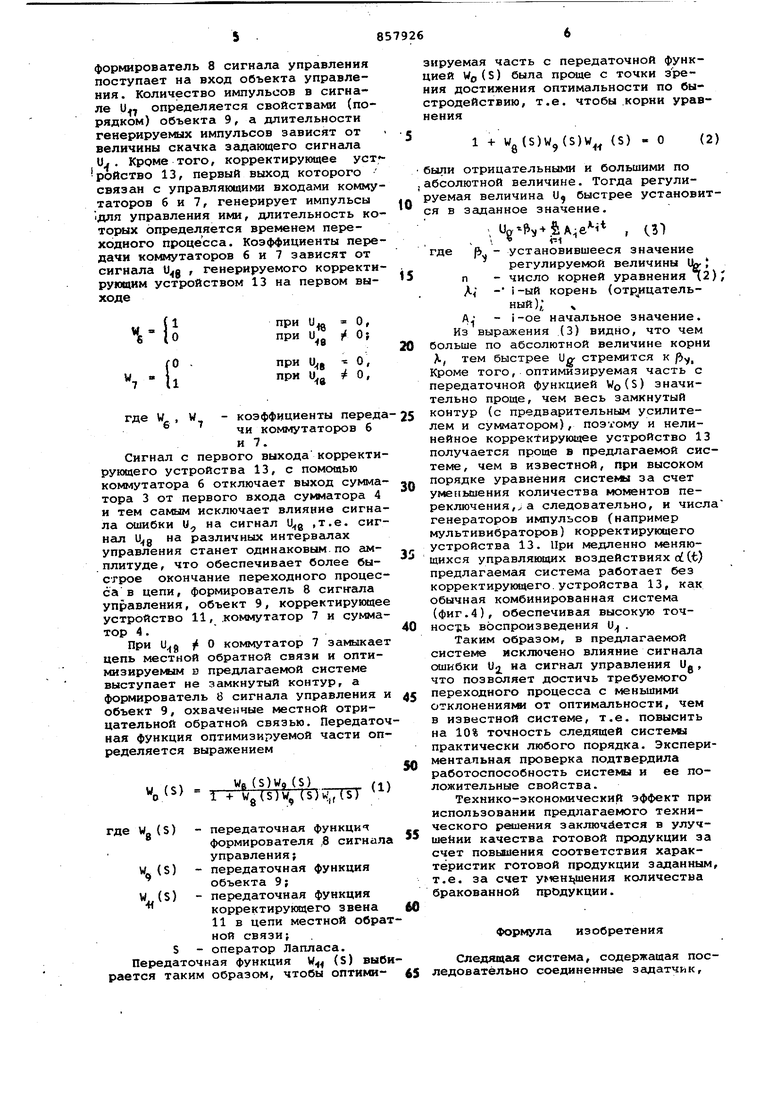
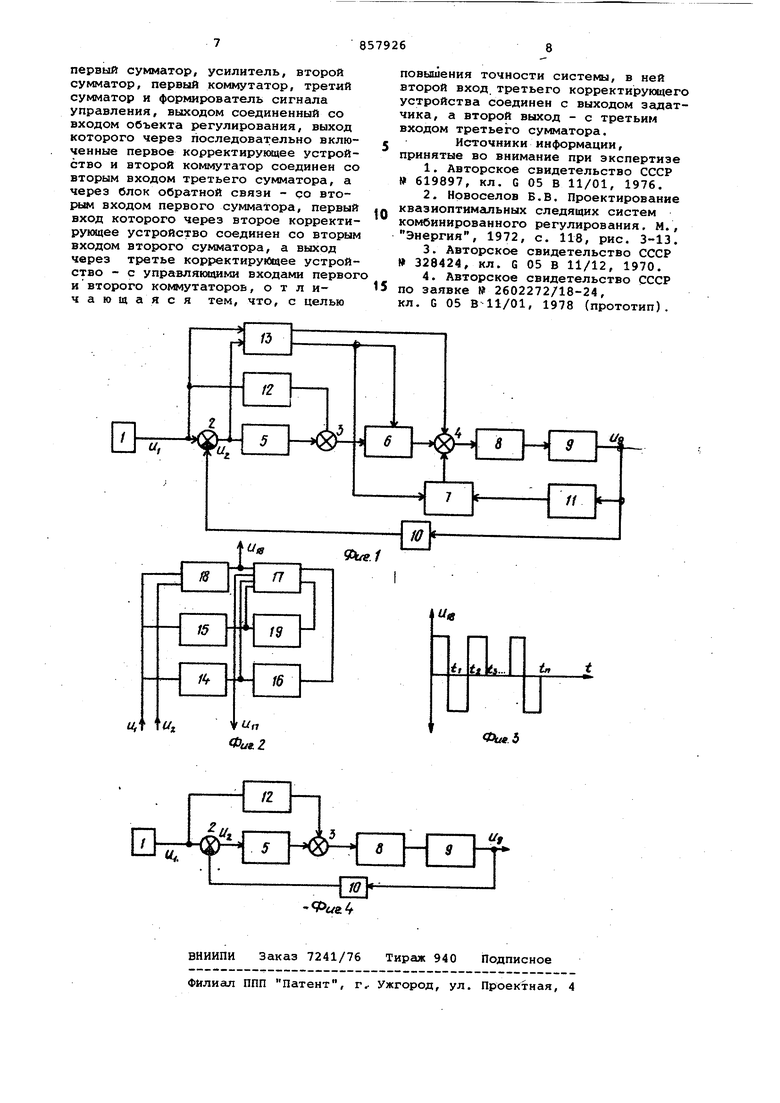
Изобретение относится к автоматическому регулированию и управлению и может быть использовано при построении следящих систем, подверженных ступенчатым задающим воздействиям. Известны следящие системы, содержащие последовательно соединенные эадатчик, первый сукматор, усилитель, второй сумматор, первый ко «утатор, третий сумматор и формирователь сигнала управления, выход которого через последовательно включенные первое корректирующее устройство и второй переключатель соединен со вторым входом третьего сумматора, а через блок главной обратной связи со вторым входом первого сумматора, первый вход которого через последовательно соединенные второе корректирующее устройство и третий коммутатор соединен со вторым входом вто рого суюлатора, управляющие входы коммутаторов соединены с соответств щими выходами блока управления, в качестве которого применяются разли ного рода нелинейные корректирующие устройства 1 и 2. Известна также следящая система, которая облетает повышенной точностью в переходных.режимах при сту пенчатом управляющем воздействии и работает в широком диапазоне изменения /;качков управления. Эта система содержит последовательно соединенные элемент сравнения, предварительный усилитель, сумматор, исполнительный блок и объект, охваченные цепью единичной обратной связи, причем один из входов элемента сравнения соединен с вне&жнм источником управляющего воздействия, а также устройство управления, первый вход которого также соединен с внешним источником управляющего воздействия, второй вход с выходом элемента сравнения, а выход соединен с вторым входом сумматора. В состав устройства управления, в свеж очередь, входят два €yльтивийратора с отрицательным выходным импульсом, блок селекторов и ключ,при этом вход система через ключ связан с первым входом блока селекторов,через последовательно соединенные мультивибратор с отрицательным выходHim импульсом и мультивибратор с положительным выходным импульсом связан со вторым входом блока селекторов, а через другие последо1заргельно соединенные мультивибрато с положительным выходным импульсом и мультивибра- тор с отрицательным выходным импулвсом связан с входом (третьим) блока селекторов, выход которого подключен к входу сумматора, а четвертый и пятый входы - к общим клеммам соответствующей пары мультивибраторов, причем вход предварительного усилителя соединен с блоком селекторов через упомянутый ключ Сз. В комбинированных следящих системах обычно дополнительно вводится связь по управляющему воздействию в виде корректирующего звена, формирующего производные по управляющему воздейств-ию для повышения порядка астатизма системы. Недостатком известной систелм является низкая точность слежения, обусловленная некоторым отклонением параметров переходного процесса от оптимальных вследствие того, что сиг налы управления на смежных интервалах, которые для сокращения времени переходного процесса должны быть одинаковыми по амплитуде и иметь разные знаки, в действительности будут различаться по абсолютной величине амплитуды, так как результирующий сигнал управления, формируемый иа сумматоре, выход которого соединен с исполнительным блоком, представляет собой сумму равных по ампли худе, но разных по знаку сигналов с устройства управления и убывающего в период переходного процесса сигнала Ошибки с предварительного усилителя. Поскольку за время переходного процесса знак сигнала ошибки не изменяется, а сигнал управления знакопеременен, получаются различные амплитуды сигнала управления на смежных интервалах. Кроме того, недостатком указанной системы является ограниченная область применения только для систем второго порядка, вследствие наличия в устройстве управления ограниченного числа мультивибраторов и простой логики управления. При более сложном объекте, когда система регулирования описывается уравнениями более высокого порядка, возможно спроектироват соответствующее устройство у правлени . используя принцип, заложенный в известной системе, однако на практике такая возможность не реализуется вследствие того, что при этом устрой ство управления усложнилось бы настолько, что резко снизились бы н дежнсй:ть и помехо.защищенность, а сле довательно, эффект применения такого устройства. Наиболее близкой по технической сущности является следящая система содержащая последовательно соединен ные йадатчик, первый сумматор усилитель, второй сумматор, первый ком мутатор, третий сумматор и формирователь сигнала управления, выходом соединенный со входом объекта регули рования, выход которого через последовательно включенные первое корректирующее устройство и второй коммутатор соединен со вторым входом третьего сумматора, а через блок главной обратной связи - со вторым входом первого сумматора, первый вход которого через второе корректирующее устройство соединен со вторым входом второго сумматора, а выход через третье корректирующее устройство - с управляющими входами первого н второго коммутаторов 4. Недостатком известной системы является низкая точность при ступенчатом воздействии, что значительно снижает область ее применения. Цель изобретения - повышение точности следящей системы. Поставленная цель достигается тем, что в следящей системе второй вход третьего корректирующего устройства соединен с выходом задатчика, а второй выход - с третьим входом треть-е го сумма тора. На фиг. 1 представлена блок-схема , cиcтeмы на фиг. 2 - блок-схема третьего корректирующего устройства; на фиг. 3 - график выходного сигнала третьего корректирующего Устройства; на фиг. 4 - структурная схема систеквз в установившемся режиме работы. Система содержит задатчик 1, первый, второй и третий суьвиаторы 2, 3 и 4, усилитель 5, первый и второй коммутаторы б и 7, формирователь 8 сигнала управления, объект 9 регулирования, блок 10 главной обратной связи, первое, второе и третье корректирующие устройства 11,12 и 13, первый, второй, третий и четвертый мультивибраторы 14,15,16 и 17,ключ 18, селектор 19. При этом U - сигнгиг на выходе i-ro функционального блока. Третье корректирующее устройство представляет собой нелинейное корректирующее устройство, в состав которого входят мультивибратор 14, генерирующий положительный импульс при положительном скачке сигнала и , мультивибратор 15, генерирующий отрицательный импульс при отрицательном скачке сигнала и , мультивибратор 16, генерирующий импульс отрицательной полярности при положительном скачке сигнала и , мультивибратор 17, генерирующий импульс положительной полярности при отрицательном скачке сигнала U , ключ 18 и селектор 19. Система работает следующим образом. При ступенчатом задающем воздействии с задатчика 1 корректирующее устройство 13 генерирует сигнал и„ в виде импульсов требуемой длительности, который через сумматор 4 и формирователь 8 сигнала управления поступает на вход объекта управления . Количество импульсов в сигнале ( определяется свойствами (порядком) объекта 9, а длительности генерируемых импульсов зависят от величины скачка задающего сигнала и . Кроме того, корректирующее уст ройство 13, первый выход которого связан с управляющими входами комму таторов 6 и 7, генерирует импульсы 1для управления ими, длительность ко торых определяется временем переходного процесса. Коэффициенты пере дачи коммутаторов 6 и 7 зависят от сигнала , генерируемого корректи рующим устройством 13 на первом выходепри U.g при О, при и Ф О, где W , W - коэффициенты перед чи коммутаторов б и 7. Сигнал с первого выхода корректи рующего устройства 13, с помощью коммутатора 6 отключает выход сумма тора 3 от первого входа сумматора 4 и тем самым исключает влияние сигна ла ошибки и,, на сигнал ,т.е. сиг нал на различных интервалах управления станет одинаковым, по амплитуде, что обеспечивает более быстрое окончание переходного процес са в цепи, формирователь 8 сигн-ала управления, объект 9, корректирующе устройство 11, .коммутатор 7 и сумма тор 4. При О коммутатор 7 замыкае цепь местной обратной связи и оптимизируемым в предлагаемой системе выступает не замкнутый контур, а формирователь 8 сигнала управления объект 9, охваченные местной отрицательной обратной связью. Передато ная функция оптимизируемой части оп ределяется выражением Wfl(S)W9(S) 1 + Wg(S)W, (S) W,, (SI где Wg (S) передаточная функциформирователя ,8 сигнал управления; W (S) - передаточная функция объекта 9; W (S) - передаточная функция корректируквдего звена 11 в цепи местной обра ной СВЯЗИ} S - оператор Лапласа. Передаточная функция W (s) выб рается таким образом, чтобы оптимизируемая часть с передаточной функцией Wo(S) была проще с точки зрения достижения оптимальности по быстродействию, т.е. чтобы корни уравнения1 + Wg(S)W(S)W (S) - О были отрицательными и большими по абсолютной величине. Тогда регулируемая величина U, быстрее установится в заданное значение. . , С31 где fb - установившееся значение регулируемой величины do-1 п - число корней уравнения 42) Л - i-ый корень (отр 1цательный); - i-oe начальное значение. Из выражения (3) видно, что чем больше по абсолютной величине корни Л( тем быстрее Ug- стремится к , Кроме того, оптимизируемая часть с передаточной функцией Wo(S) значительно проще, чем весь замкнутый контур (с предварительным усилителем и сумматором), поэтому и нелинейное корректирующее устройство 13 получается проще в предлагаемой системе , чем в известной, при высоком порядке уравнения системы за счет уменьшения количества моментов переключения, а следовательно, и числа генераторов импульсов (например мультивибраторов) корректирующего устройства 13. При медленно меняющихся управляющих воздействиях rfCt) предлагаемая система работает без корректирующего.устройства 13, как обычная комбинирюванная система (фиг.4), обеспечивая высокую точHoctb воспроизведения U . Таким образом, в предлагаемой системе исключено влияние сигнала ошибки сигнсШ управления и. , что позволяет достичь требуемого переходного процесса с меньшими отклонениякм от оптимальности, чем в известной системе, т.е. повысить на 10% точность следящей системы практически любого порядка. Экспериментапьная проверка подтвердила работоспособность систе «л и ее положительные свойства. Технико-экономический эффект при использовании предлагаемого технического решения заключается в улучшейии качества готовой продукции за счет повьаиения соответствия характеристик готовой продукции заданным, т.е. за счет умен1 шения количества бракованной продукции. Формула изобретения Следящая система, содержащая последоватёльио соединенные задатчик. первый сумматор, усилитель, второй сумматор, первый коммутатор, третий сумматор и формирователь сигнала управления, выходом соединенный со входом объекта регулирования, выход которого через последовательно включенные первое корректирукндее устройство и второй коммутатор соединен со вторым входом третьего сумматора, а через блок обратной связи - ро вторым входом первого сумматора, первый вход которого через второе корректирукицее устройство соединен со вторым входом второго сумматора, а выход через третье корректируйадее устройство - с управляки1Ц1ми входами первог ивторого коммутаторов, о т л ичающаяся тем, что, с целью повышения точности системы, в ней второй вход третьего корректирующего устройства соединен с выходом задатчика, а второй выход - с третьим входом третьего сумматора. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР 619897, кл. G 05 В 11/01, 1976. 2.Новоселов Б.В. Проектирование квазиоптимальных следящих систем комбинированного регулирования. М., Эиергия, 1972, с. 118, рис. 3-13. 3.Авторское свидетельство СССР 328424, кл. G 05 В 11/12, 1970. 4.Авторское свидетельство СССР по заявке 2602272/18-24, кл. G 05 В 11/01, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1105858A1 |
| Следящая система | 1977 |
|
SU714351A1 |
| Следящая система | 1979 |
|
SU826269A2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Устройство регулирования и стабилизации мощности | 1987 |
|
SU1578703A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU328424A1 |
| Следящая система | 1988 |
|
SU1589254A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
