(54) СЛЕДЯЩАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1985 |
|
SU1325402A1 |
| Следящая система | 1980 |
|
SU962841A1 |
| Следящая система | 1979 |
|
SU826269A2 |
| Следящая система | 1990 |
|
SU1829024A1 |
| Следящая система | 1979 |
|
SU881657A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| Следящаяя система | 1979 |
|
SU857926A1 |
| Следящая система | 1977 |
|
SU732807A1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
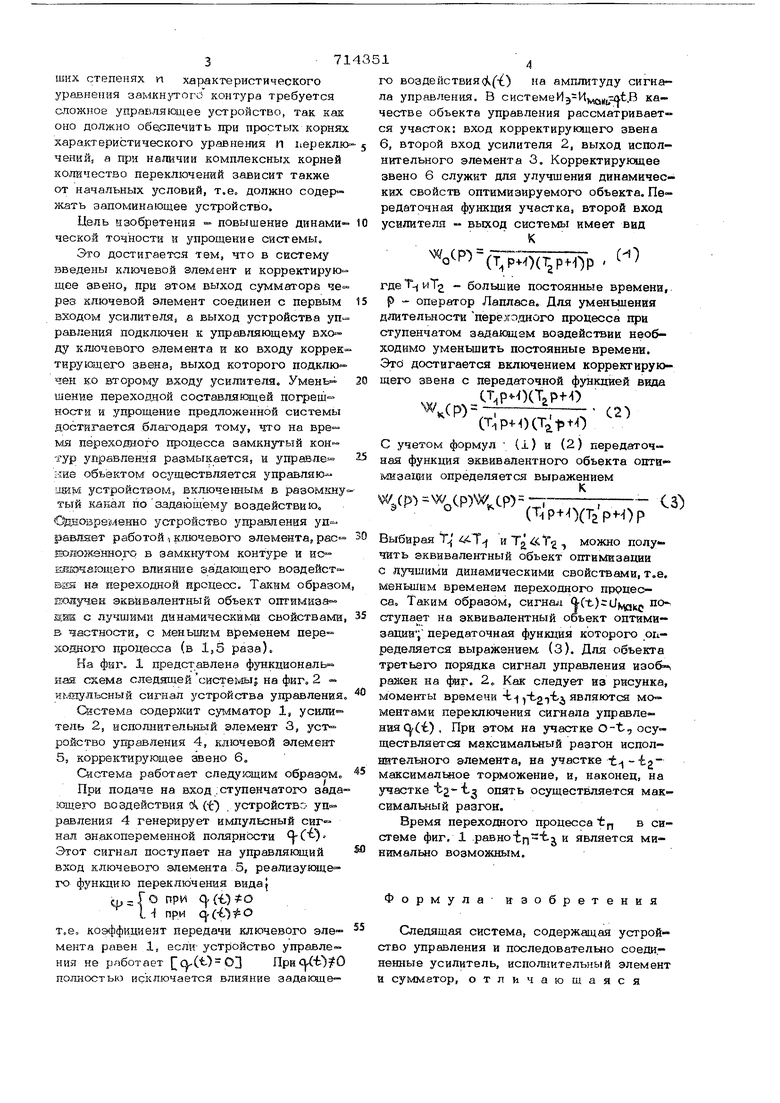
.„, Изобретение относится к области авто магического регулирования и может быть использовано в автоматических системах при скачкообразных входных возДейстйиях, Известны следяшие г системы, содержа щие замкнутый контур управления. Следя щая система, кроме последовательно соединенных предварителиного усилителя,усилителя мощности, исполнительного двигателя, объекта и иепи единичной обратной связи, содержит два мультивибратора, блок селекторов и ключ. Такая система осуществляет переходной процесс при ступенчатом управляющем воздействии, оптимальный по быстродействию Д , Однако такая система обеспечивает уменьшение переходной составляющей ошиб ки только при постоянных амплитудах скач ков задающего воздействия. По технической сздцности наиболее близкой к предложенному является oneдящая система, которая содержит устройство управления и последовательно соединенные усилиггель, исполнительный элемент и сумматор. В этой системе при од ном знаке амплитуды скаЧка задакидегхэ воздействия импульсы с устройства управления в течение длитёпыюсти переходко;го процесса изменяют свой знак П раз, где Я - степень характеристического уравнения замкнутого контура. При этом эквивалентный сигнал управлшия И авен И, () .(t.) , гйё ) - задаетдее воздействие, q(t) - импульсный си.Гнал знакопеременной полярности с устройства ущэавления .. Однако так, как «знаки н O-Ct) на чередукяцихся интервалах совпадают, то И на соседних интервалах будет различным, что ведет к увеличению переходной составляющей погрешности по сравнению со случаем, когда И,(, где максимально возможная амплитуда сигнала управления. Таким образом, в этой системе задающее воздействие d,(i:) влияет на переходной процесс, увеличивая его длителълость (цри этом, появляется перерегулирование). Кроме того, при бол1у 71 ших степенях п характеристического уравнения замкнутого контура требуется сложное управлякхцее устройство, так как оно должно обеспечить при простых корнях характеристического уравнения п пареклк чений, а при наличии комплексных корней количество переключений зависит также от начальных условий, т,е. должно содержать запоминающее устройство, Цель изобретения повышение динамической точности и упрощение системы Это достигается тем, что в систему введены ключевой элемент и корректирую щее звено, при этом выход сумматора через ключевой элемент соединен с первым входом усилителя, а выход устройства управления подключен к управляющему входу ключевого элемента и ко входу коррек тйрунвдего звена, выход которого подклю чен ко второму входу усилителя. Умень шенйе переходной составлякяцей погрешности и упрощение предложенной системы достигается благодаря тому, что на вре М-Я переходного процесса замкнутый контур управпеная размыкается, и у правде i-ше объектом осуществляется управля ощйм устройством, включенным в разомкну тый 1Ш1-шл позадающему воздействию, «Шновременно устройство управления уп равляет работой i ключевого элемента, рас Е оло}кенного Б замкнутом контуре и ис ЕЕЕвэчающего влияние задающего воздейстBais на переходной процесс. Таким образом ЕЕОлучен эквивалентный объект оптимиза дйЕ с лучщими динамическими свойствами в застности, с меньшим временем переходйого процесса (в 1,5 раза). На фаг. 1 представлена функциональная схема следящей снсте1«ш(| на фиг, 2 - иьатульсный сигнал устройства управления Система содержит сут лматор 1, усили тель 2, исполнительный элемент 3, устройство управления 4, ключевой элемент 5, корректирующее звено 6„ Система работает следукацим образом. При подаче на вход .ступенчатого зада ющего воздействия ck (f) .устройство уц. равления 4 генерирует импульсный сигнал зн.акопеременной полярности Этот сигнал поступает на управлякаций вход ключевого элемента - 5, реализукнце го функцию переключения вида} при :(-Qfo I -( при т.е, коэффициент передачи ключевого злемента равен 1, если- устройство управления не работает q(t)O3 )0 полностью исключается влияние задающе- 14 го БОздействияо1,С-) на амплитуду сигнала управления, В cHCTeMeHg-H jmt.B качестве объекта управления рассматривается участок: вход корректирующего звена 6, второй вход усилителя 2, выход исполнительного элемента 3. Корректирующее звено 6 служит для улучшения динамических свойств оптимизируемого объекта. Передаточная функдая участка, второй вход усилителя - выход системы имеет вид °(). t - большие постоянные времени,, р - оператор Лапласа, Для уменыценйя длительности перехэдаого процесса при ступенчатом задаквдем воздействии необходимо уменьшить постоянные времени. Это достигается включением корректирующего звена с передаточной функцией вида W/ . ч CT. к(Р).„. .. ,. .: С2) ) с учетом формул (i) и (2) передаточная функция эквивалентного объекта оптимизацииопределяется выражением К - СЗ) W(P)WQCP)) (т,р+)(Тгри)р Выбирая Xj 44.7 и , можно получить эквивалентный объект оптимизации с лучшими динамическими свойствами, т.е. меньшим временам перехохшого процесса. Таким образом, сигнал Q-Ct)U(v(tj, пoступает на эквивалентный объект оптими- заций передаточная функция которого определяется выражением (З). Для объекта третьего порядка сигнал управления , pasccH на фиг. 2,, Как следует из рисунка, моменты времени-t являются мо ментами переключения сигнала управления(|() , При этом на участке О-t-, осуществляется максимальный разгон исполнительного элемента, на участке максимальное торможение, и, наконец, на участке bg 3 осуществляется максималы1Ый разгон. Время переходного процесса t в системе фиг, 1 .paBHOtrj-t. и является минимально возможным. Формула изобретения Следящая система, содержащая устройство управления и последовательно соединенные усилитель, исполнительный элемент и сумматор, отличающаяся
тем, что, с целью повышения динамической точности и упрощения системы, в нее введены ключевой элемент к корректирук щее звено, выход сумматора ключевой элемент соединен с первым входом усилителя, а выход устройства управления подключен к управляющему входу ключевого элемента и ко вхо ду корректирующего звена, выход ког()
торого подключен ко второму входу усилителя.
Источники информации, принятые во внимание при экспертизе
JS& 328424,М.Кл. Gf 05 В 11/01,1970.
№ 331366,М. 05 В11/О1,1970 (прототип).
фиг.1
