(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| БСЕСОЮЭИАЛ ПДТЕНТЙ.ВTEKH^ECflAn БИ5Л^10Т?КА | 1972 |
|
SU331366A1 |
| Следящая система | 1983 |
|
SU1105858A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Следящаяя система | 1979 |
|
SU857926A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| Следящая система | 1977 |
|
SU714351A1 |
| Следящая система | 1979 |
|
SU881657A1 |
| Следящая система | 1985 |
|
SU1325402A1 |
| Следящая система | 1979 |
|
SU822148A1 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
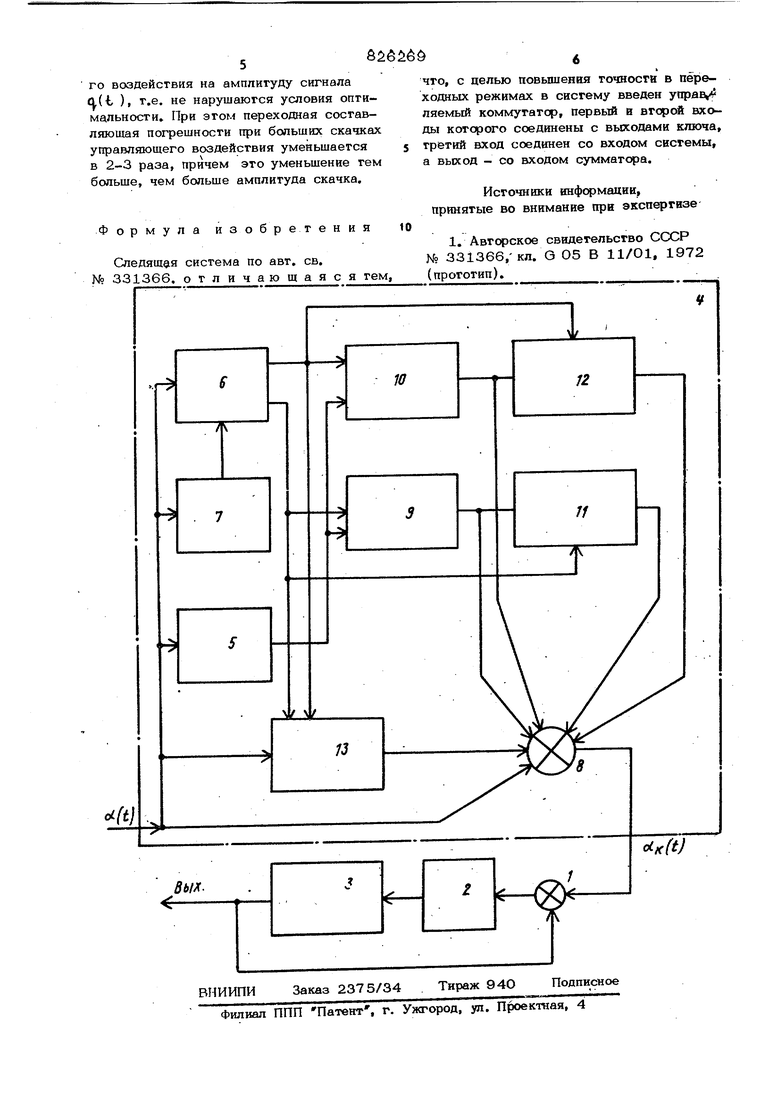
Изобретение относвгся к системам для регулирования и управления, в часгности к автоматическим регуляторам. По основному авт. св. N 331366 известна следящая система, содержащая зам кнутый контур регулирования, состоящий из последовательно соединенных элемента сравнения, усилителя и исполнительного элемента, сумматор на входе замкнутого контура, дифференциатор, ключ и мультивибратор подключенные ко входу системы, четыре преобразователя амплитуды сигнала в. длительность импульсов, выходы которых подсоединены ко входам сумматора, входы первого и второго преобразователе соединенных последовательно, соединены с первым выходом ключа, входы третьего и четвертого преобразователей, соединенных также последовательно, соединены со вторым выходом ключа, а вторые входы первого и третьего преобразователей соединены с выходом диффepeндиaтqpa 1. Поскольку сигналы с выходов преобразователей CJ (-t) на интервалах tf в имеют различную полярность, а сигнал oid,} не изменяет полярности на интервале времени Т.- ТУ , то суммарный сигнал на выходе сумматорао(|(-Ь ) имеет различную амплитуду на промежутках Т; и Cg- приводит к отклонению от оптимальности по iбыстродействию, т.е. к увеличению длительности переходного процесса, так как в оптимальной системе сигнал на интервалах f 21 Должен быть постоянной амплитуды (максимально возможной при заданных ограничениях на крординаты системы). Кроме того, непостояйство амплитудыои Ъ) не интepвaлak t и/(арушает пропорциоаальность длительности импульсов от амплитуды kC -Ь), что приводит к усложнению преобразователей амплитуды сигнала в длительность импульсов. Цель изобретения - повышение точности системы в переходных режимах при любых амплитудах скачков управляющего воздействия. Поставленная цель достигается тем, -что в систему введен управляемый коммутатор, первый и второй входы котфого соединены соогвегственно с выходами клю ча, третий вход соединен со входом системы, а вькод - со входом сумматора. Введение дополнительного управляемого коммутатора, передаточная функция которого равна и О 1при Do о О при позволяет полностью устранить влияние управляющего воздействия ci.Ct) на сигнал q, { -Ь ) на время длительности переходного процесса, так как на выходе сумматора во время переходного процесса имеем d(l}--ci.((i)((,}. Учитывая формулу (l) для переходного процесса, имеем с(| (-Ь) - « Ct)Таким образом, как сигнал разгона, так и сшнал торможения имеют одинаков вую амплитуду, следовательно, и минимал ную длительность переходного процесса при любых амплитудах скачков управляющего аседействия сК -Ь ). На чертеже представлена блок-схема предлагаемой следящей системьх. Отедящая система содержит элемент 1 сравнения, усилитель 2, исполннтельньй элемент 3, корректирующее ycTpoAcTBOjU 4, дифференциатор 5, ключ 6, мультивибратор 7, сумматор 8, четьфе преобразователя 9-12 амплитуды сигнала в длительность импульсов Ц (t), управляемый коммутатор 13. При медленно меншощихся управлгяющих воздействиях cL( t) следящая система работает так, что корректирующее уст ройство 4 не преобразовывает сигнал, т.е. c(t(-b) ci.(-t), гдео1ц() - выход ной сигнал корректирующего устройства 4, Ошибка, обусловленная медленно меня ющимся управлщощим воздействием, буде определяться параметрами замкнутого ко тура, которые выбираются так, чтобы эт ошибка была минимальной. При ступенчатых управЛ5иощих воздейс виях; корректирующее устройство 4 следя щей системы преобразовьтает et.( Ь ). Теперь уже о(.(-Ь ) (.(-t). При поступлении положительного скач ка управляющего зоздейстбйя: oi-Ci:. ) му тивибратор 7 генерирует импульс t-, к торый открывает ключ 6 на время, равное длительности упомянутого импульса При этом с вькода ключа напряжение. пропорциональное величине скачкаot (-fc) положительной полярности поступает на преобразователь 10, запускающийся выходным импульсом дифференциатора 5. На выходе преобразователя Ю формируется импульс напряжения положительной полярности, длительность которого Т зависит от амплитуды входного напряжения. Преобразователь 12 запускается задним фронтом импульса Т. На выходе преобразователя 12 появляется импульс отрицательной ПОЛ5ФНОСТИ с длительностью пропорциональной амплитуде скачка управляющего воздействия cA(-fc). При этом выходное напряжение на втором вькоде ключа равно нулю. Преобразователи 9 и 11 не работают. В сумматоре 8 управляющее воздействие (Л(Ь ) и сигналы с выходов преобразователей ((t) складываются. Суммарный выходной сигнал корректирующего устройства 4 сИ( t) поступает на вход замкнутого контура. Корректирующее устройство обеспечивает такое преобразо, вание входного сигнала, чтобы получить оптимальный переходной процесс в системе, не влияя на замкнутый контур корректируемой системы. При отрицательном скачке система работает аналогичным образом, но срабатывают преобразователи 9 и 11. . При o{.(t)(t)Блияниемо((1) можно гфенебречь, а при oC(-t). соизмеримых по амплитуде с (b(-fc ), необходимо устранить влияние c.(-fc) наС(Ъ) во время переходного процесса. Для исключения этого влияния используется управляемый коммутатор 13. Передаточная функция коммутатора равна .и о, и 4 О; (1) О при I 0. О, Ua Р Таким образом, на выходе сумматора 8 во впемя переходного прсянасса име.ем of.,(t)--c((t) и - кi::-1oi(i))+cva); где )-- 2 U-. i-t Учитывая формулу (1), для переходного процесса имеем oiK(t)(t)Использование «ового элемента - управляемого коммутатора -. выгодно отличает предлагаемую следящую систему от известной, так как во время переходного процесса исключено влияние управляющего воздействия на амплитуду сигнала «(i ), т.е. не нарушаются условия оптимальности При этом переходная составляющая погрешности при больших скачках управляющего воздействия уменьшается в 2-3 раза, причем это уменьшение тем больше, чем больше амплитуда скачка. Формула изобретения Следящая система по авт. св. № 331366. отличающаяся тем что, с целью повышенвя точносгн в переходных режимах в сисгему введен уорав, ляемый коммутатор, первый в второй входы которого соединены с выходами ключа, третий вход соединен со входом сисгемы, а выход - со входом сумматора. Источники информации, принятые во внимание при экспергизе 1. Авторское свидетельство № 331366,-кл.О 05 В 11/О1, 1972 (прототип).
