(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОФУНКЦИОНАЛЬНОЙ ИСКУССТВЕННОЙ КИСТЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМ | 2016 |
|
RU2653820C2 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Биолектрическая система управления протезом верхнейКОНЕчНОСТи | 1978 |
|
SU728232A1 |
| Биоэлектрическая система управления протезом верхней конечности | 1973 |
|
SU467742A1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| Искусственная кисть | 1979 |
|
SU854388A1 |
| Протез предплечья с биоэлектрическим управлением для детей | 1978 |
|
SU766594A1 |
| УСТРОЙСТВО ПОЗИЦИОННОГО ОЧУВСТВЛЕНИЯ ПОДВИЖНОСТИ ПАЛЬЦЕВ ИСКУССТВЕННОЙ КИСТИ | 2019 |
|
RU2712306C1 |
Изобретение касается протезирования и протезостроения.
Известно устройство для управпения многофункциональной кистью, содержащее эдектроприводы, токосъемники, усипитепи
биопотенциапов, усилитепи мощности и бпоки преобразования сигналов.
Однако эги устройства требуют дпя управпения купачным и концевым схватами четырех мыщц, что вызывает необходимость длительной тренировки инвалидов на изолированное сокращение каждой из четырех мышц и утомление инвалида при yiipciii.ieHHH таким устройством.
Для возможности управпения купачным и концевым схватами при снижении утомгления и исключения тренировки оператора предлагаемое устройство снабжено блокам распознавания биоэлектрического образа движений и блоком управления электропри водами. При этом блок распознавания выполнен в виде совокупности решающих элементов и энекхрическй связан с блоком управпения, который выполнен в виде позционных датчиков и решающего эпементаа
размещенных на электроприводах и собранных по схеме отспеживания вида движения
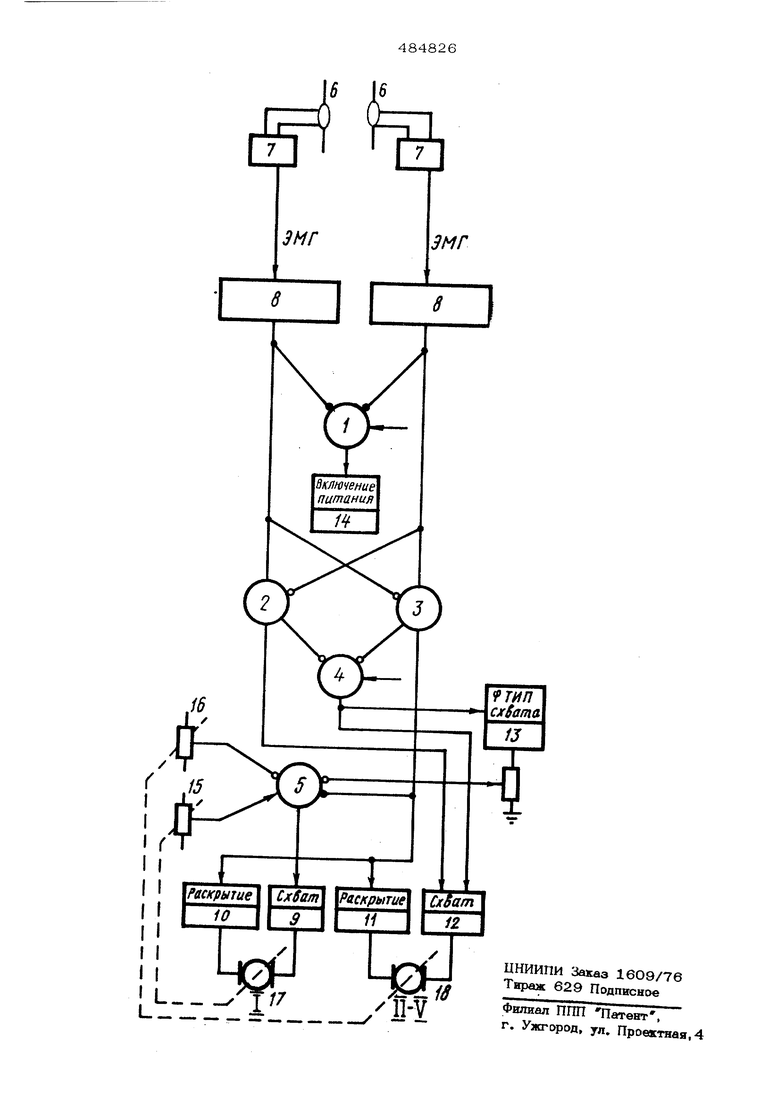
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит рещающие элементы 1-5;. токосъемники 6, связанные с усилителями 7 напряжения, на выходе которых включены бпоки преобразования сиг налов в виде интегрирующих цепочек 8, усилители 9-14 мощности и позиционные датчики 15 и 16. расположенные соответс венно на электроприводе 17 первого папьца и на электроприводе 18 б л ока11-У пальцев.
Решающие элементы 1,2,3 и 4 образуют блок распознавания биоэлектрического образа движений, а позиционные дат чики 15 к 16 с решающим элементом 5, собранные по схеме отслеживания вида движения.
Устройство работает следующим образом. При отсутствии сигналов ка входе устройства управпения на выходе первого решающего элемента 1 появляется сигнал, выключающий питание схемы. При появлен
сигнапа на первом входе на выходе решающего эпеменга 1 сигнап спадает до нупя и подключается питание ко всей схеме. На выходе решающехо элемента 2 появляется сигнап, равный напряжению питания, , который подается на усилитель 12 мощности коммутирующий на схват электропривод 18 блокаП -Y пальцев. Одновременно этот сиг- ьюл подай.„л на тормозной вход решающего элемента 4, вызывая уменьшение его выходного сигнала до нуля. В результате этого усилитель 13 мощности выключается, а на тормозном входе решающего элемента 5 сигнал, пропадает.
На выходе решающего элемента 3 в силу отсутствия напряжения на его возбуждающем входе выходной сигнап равен нулю. 11ри движении блока 11 -V пальцев начинает изменяться (уменьшаться) сигнап, поступающий на тормозной вход решающего элемента 5 с позиционного датчика 16 Это приводит к тому, что на выходе решающего элемента 5 появляется сигнап. ripss превышении этим сигналом порога усилителя 9 мощности, коммутирующего электропривод 17 бпока 1 папьца на схват первый папец начинает двигаться, и скг нал, поступающий на возбуждающий вход решающего элемента 5 с позиционного датчика 15, уменьщается. Таким образом осуществляется отслеживание движения электропривода 17 бпока 1 пальца по положению относительно движения электропривода 18 блокаН-Упапьцев; Весовые коэффициенты решающего элемента 5 подобраны так, что в этом случае осуществляется концевой схват.
При поступлении на оба входа сигналов соответствующих биоэлектрическому образу хулачного схвата, на выходе решающего элемента 2 и решающего элемента 3 сигналы равны нулю. Вследствие этого на выходе решающего элемента 4 появляется сигнал, который поступает как на усилйтепь 12j коммутирующий на схват электропривод 18, так и на усилитель 13 мощности, определяющий вид схвата.
Выбор вида схвата осуществляется путем включения усилителя 13 мощности, напряжение с которого поступает на тормозной вход решающего элемента 5. При работе электроириаода 18 блокаП-Упальгцев сигнап с поа5щионнаго датчика 16, по ступающий на тормозной вход решающего элемента 5, уменьшается. В том случае,
когда сумма сигналов с их весами на тормозных входах решающего элемента 5 станет меньше сигнала, поступающего на возбуждающий вход с позиционного датчика 15 электропривода 17 блока 1 пальца, на его выходе появляется сигнал, который при превыщении порога усилителя 9 мощности, коммутирующего на схват электропривод 17, включает его в движение. Движение блока 1 пальца вызывает уменьшение возбуждающего воздействия на решающий элемент 5. В том случае, когда с позиционного датчика 15 станет равным сумме тормозных воздействий решающего элемента 5, движение бпока 1 папьца прекратится. Величина напряжения, / вкпючаемого усипитепем 13 мощности,подбирается таким образом, чтобы обеспечивалось необходимое позиционное запаздывание
движения блока 1 пальца по отношению движения блокаЦ-Упальцев, чем обеспечивается образование кулачного схвата.
Использование в устройстве управления блока распознавания биоэлектрического
образа движения и бпока управления позволяет осуществлять выбор нужного вида схвата и осуществлять управление независимо от начального положения пальцев кисти в пространстве без какой-либо предварительной тренировки оператора.
Формула изобретения
35
Устройство для управления многофункциональной искусственной кистью, сопепжаЩее электроприводы, токгх;ъемники, усилители биопотенциалов, усилитель мощности и блоки преобразования сигналов, о т л и- чающеесячто, с пйпью во. можности управления кулачным и концевым
схватами дрн сниже нии утомления и исключения тренировки оператора, оно снабжено блоком распознавания биоэлектрического образа движений и блоком управления электроприборами, причем блок распознавания выполнен в ви-
де совокупности решающих элементов и электрически связан с блоком управления, который вы полнен в виде позиционных датчиков и решающего элемента, размещенных на электропроводах и собранных по схеме отслеживания вида дви-
жения.
