Клиньевой захват относится к машиностроению и может быть использован в качестве грузозахватного ycTpoficiria в элеваторах и слайдерах, применяющихся при бурении и ремонте нефтяных и газовых скважин, а также в других отраслях народного хозяйства.
Известен клиньевой захват, состоящий из двух и более клиньев, расноложенных в конической расточке корпуса и снабженных на рабочей поверхности насечкой или рифлением и элементами, обеспечиваюн1ими синхронное перемещение клиньев как в осевом, так и радиальном направлениях. Радиус кривизны внутренней поверхности клиньев выполнен равным радиусу своего исходного контура, т.е. радиусу кривизны захватываемой цилиндрической детали, в связи с чем наружная поверхность для обеспечения передвижения клиньев в корнусе по мере внедрения зубьев насечки в захватываемую деталь выполнена эксцентрично относительно внутренней.
Принцип действия известных клиньевых захватов основан на том, что в результате приложения к захватываемой детали осевой нагрузки находящиеся с ней в контакте клинья, перемещаясь по конусной поверхности расточки корпуса вместе с захваченной деталью, внедряются зубьями насечки или рифления в последнюю и тем са.мым удерживают деталь (груз) 1.
Однако при такой конструкции клиньевого захвата внедрение зубьев насечки в захватываемую деталь при радиальном перемещении клиньев оказывается неравномерным, что подтверждается формулой
($ R l-Л1 (- ) + hcosf, так как R h, (5 h cosf.
или,
где д величина внедрения зубьев насечки в захватываемую деталь; Ь - высота зуба насечки; R - радиус внутренней поверхности клина или радиус охватываемой цилиндрической детали; f -угол, отсчитываемый от середины
клина.
Как видно из формулы точка, соответствующая середине клина, т.е. при 0°, получает максимальное перемещение, равное h, а точка, соответствующая краю клина, т.е. при Y 90°, получает перемещение, равное нулю (так как cos 90° 0).
Внедрение зубьев насечки в захватываемую деталь начинается от середины клина и по мере его радиального перемещения распространяется на новые участки зубьев насечки.
Следовательно, для обеспечения надежного захвата клиньями цилиндрической детали при прочих равных условиях необходимо увеличивать число рядов зубьев, т.е.
высоту клипа, что приводит к уие.пшению металлоемкости конструкции в целом.
I-I:iBecTCn клиньевой захват для цилиндрических деталей (труб), содержащий корпус R конической расточке которого расположены к,;тнья с зубями насечки и элементы, обеспечивающие синхронное перементение клиньев в осевом и в радиальном направлениях 2).
Однако в этом клиньевом захвате радиус кривизны внутренней поверхности клиньев также выполнен равным радиусу кривизны своего исходного контура (захватываемой детали) и, следовательно, наружная поверхность клиньев выполнена эксцентричной относительно их внутренней поверхности, так как и в этой конструкции имеет место неравномерное внедрение зубьев насечки клина в захватываемую деталь и связанное с этим увеличение металлоемкости.
Для снижения металлоемкости клинье0 вых захватов при прочих равных условиях необходимо обеспечить равномерное внедрение зубьев насечки клина по окружности в захватываемую деталь, что дает возможность уменьщить высоту клиньев, а вместе с этим - габариты конструкции в целом.
Целью изобретения является снижение металлоемкости захватных клиньев при сохранении грузоподъемности захвата.
Поставленная цель достигается тем, что в клиньевом захвате для цилиндрических 0 деталей, содержащем корпус, в конической расточке которого расположены клинья с зубьями насечки и элементы, обеспечивающие синхронное перемещение клиньев в осевом и в радиальном направлениях, радиус кривизны внутренней поверхности клиньев 5 меньше радиуса кривизны обхватываемой цилиндрической детали на величину высоты зуба насечки, причем внутренняя и наружная поверхности клиньев концентричны.
цНа фиг. 1 показана схема, поясняющая
принцип действия известного клиньевого захвата; на фиг. 2 - то же, предлагаемого клиньевого захвата; на фиг. 3 - клиньевой захват в статике; на фиг. 4 - разрез .-А на фиг. 3.
5Клиньевой захват состоит из корпхса 1,
в конусной расточке которого расположены два и более клина 2, имеющих на внутренней поверхности насечку, в радиальной проточке которых расположены вкладыши 3, предохраненные от выпадания болтами 4.
Вкладыщи 3 служат для обеспечения синхронного перемещения клиньев в корпусе как в осевом, так и в радиальном направлениях. Радиус кривизны внутренней поверхности клиньев 2 выполнен меньшим, чем
5 радиус исходного контора этих клиньев, на ве;1ичину зуба насечки, а внутренняя и наружная поверхности кличов концентричны (фиг. 3).
КлиньевоГ paooTiier образом.
11ервоиача.1ьн(). в ненагрх женпом состоянии клинья кас;1К)тся захватываемой детлли ЛИНИ) по краям, т.о. по образующим цили1 дрическ1;| новер.хиости, так как радиус кривизиы г;;;, трспией иовер.хности к.1инье1 меньше радиуса охватываемой ци.тиидрической детали на величину насечки. По мере нагружения захватываемой детали оеевой силой последняя перемеп1ается вниз, увлекая за собой находяпи1еся с ней в контакте клинья, которые, ско.тьзя по конусной расточке корпуса, продвигаются в радиальiio.M наиравлении и внедряются зубья.ми насечки в захватываем ю деталь, тем са.;i,i удерживая ее. В от.пичие от известного з-ахвата внедрение зубьев насечки начинается or краев к,1пна и по .мере увеличения осеrio.ii силы распространяется на новые участки з иьев и при достижении осевой си.юй максимальной расчетной ве/шчины зубья насечки полностью внедряются но окружности в захваченную деталь, при этом обеспечивается равномерное внедрение зубьев 1К) окружности.
В предлагаемом клиньевом захвате но сравнению с известным достигается уменьшение выеоты клиньев на 60Vo. что нозво.тяет умепылить габариты всего клииьевого захвата и вместе с этим его метал.юемкость.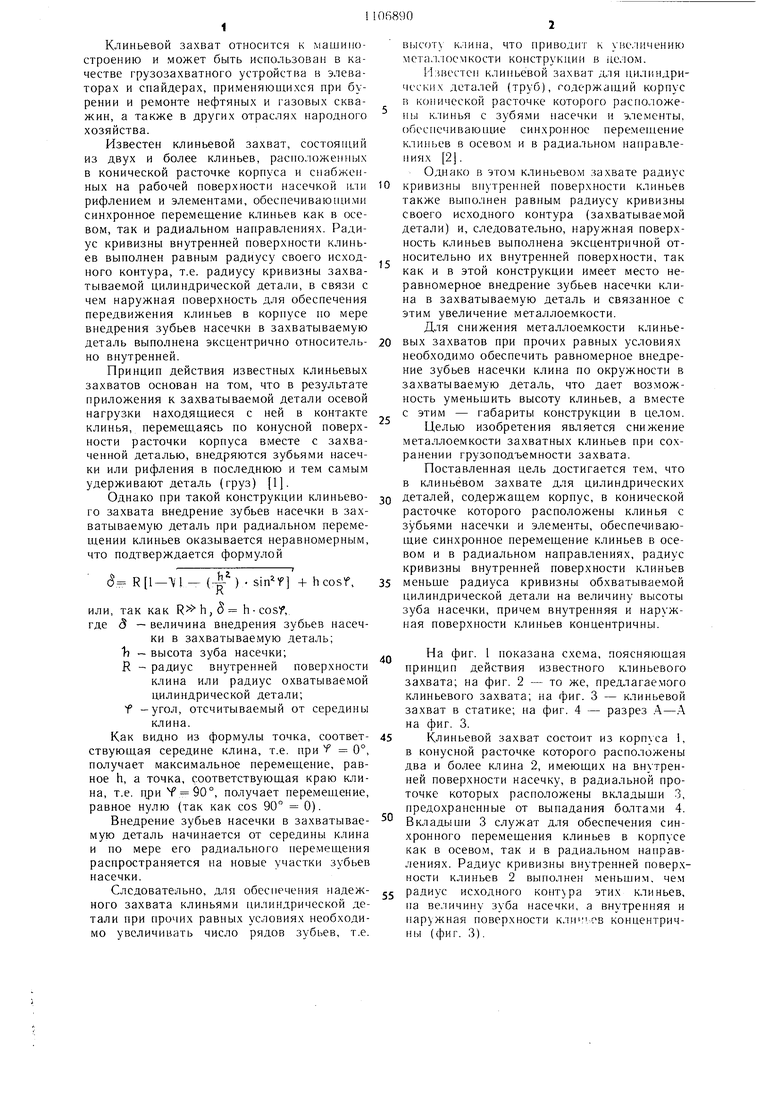
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛИНЬЕВОЕ УСТРОЙСТВО ДЛЯ ЗАХВАТА ТРУБ В РОТОРЕ БУРОВОЙ УСТАНОВКИ | 2001 |
|
RU2232867C2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ДЛИННОМЕРНОЙ ТРУБЫ | 2015 |
|
RU2601711C1 |
| ГИДРАВЛИЧЕСКИЙ ОТКЛОНИТЕЛЬ | 2008 |
|
RU2361056C1 |
| Колонная головка | 1982 |
|
SU1105609A1 |
| РАЗБУРИВАЕМЫЙ ПАКЕР | 2005 |
|
RU2304694C2 |
| Наружная освобождающаяся труболовка | 1980 |
|
SU962583A1 |
| Отклонитель | 1981 |
|
SU1089224A1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ТРУБ В СКВАЖИНЕ | 2009 |
|
RU2387796C1 |
| ОТКЛОНИТЕЛЬ | 2012 |
|
RU2502857C1 |
| УСТРОЙСТВО КЛИНОВОЕ ЗАПОРНОЕ И ПРОТИВОСДВИГОВОЕ | 2005 |
|
RU2293009C2 |

КЛИНЬЕВОЙ ЗАХВАТ ДЛЯ ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ, содержащий корпус, в конической расточке которого расположены клинья с зубьямт) насечкн и элементы, обеспечивающие синхронное перемещение клиньев в осевом и в радиальном направлениях, отличающийся тем, что, с целью снижения металлоемкости захватных клиньев при сохранении грузоподъемности захвата, радиус кривизны внутренней поверхности клиньев меньше радиуса кривизны обхватываемой цилиндрической детали на величину высоты зуба насечки, причем внутренняя и наружная поверхности клиньев -концентричны. (Л О5 сх со
| Клиньевой захват для бурильных и обсадных труб | 1949 |
|
SU95916A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Муравьев.И | |||
| М., Базлов М | |||
| Н., ЖуkoB А | |||
| И | |||
| и Чернов В | |||
| С | |||
| Технология и техника добычи нефти и газа | |||
| М., «Недра, 197-1 | |||
| с | |||
| Устройство для преобразования движения поршня двигателя во вращательное движение вала | 1922 |
|
SU452A1 |
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
