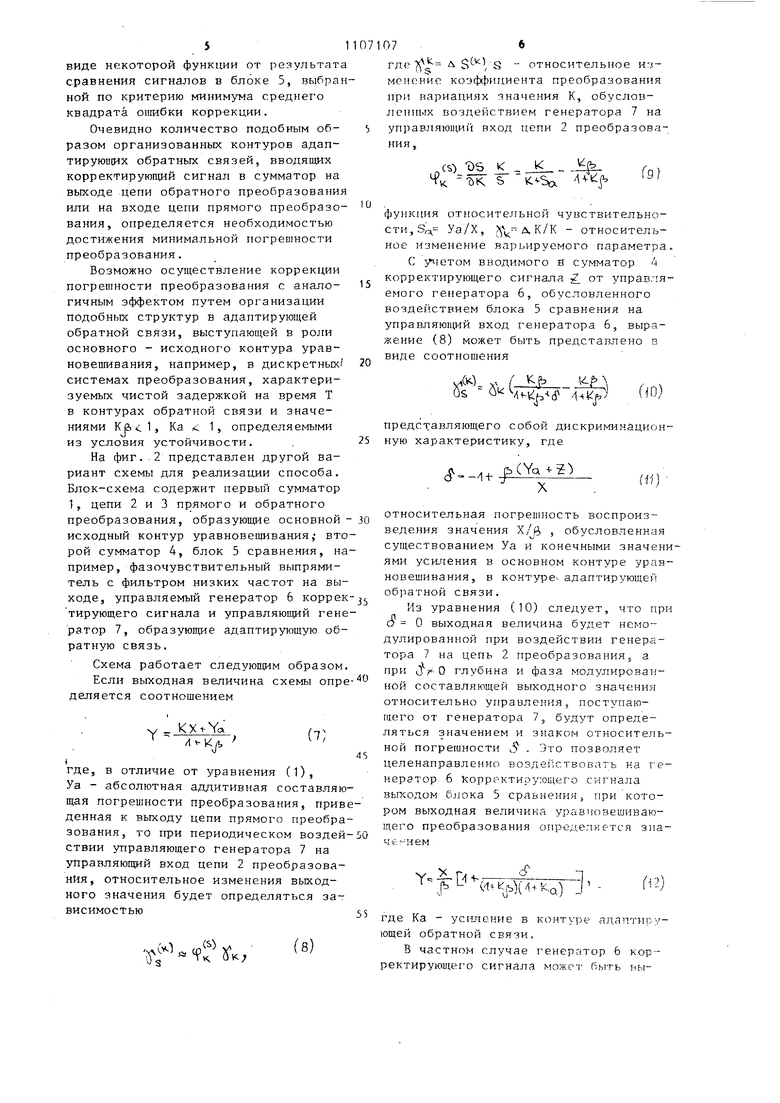
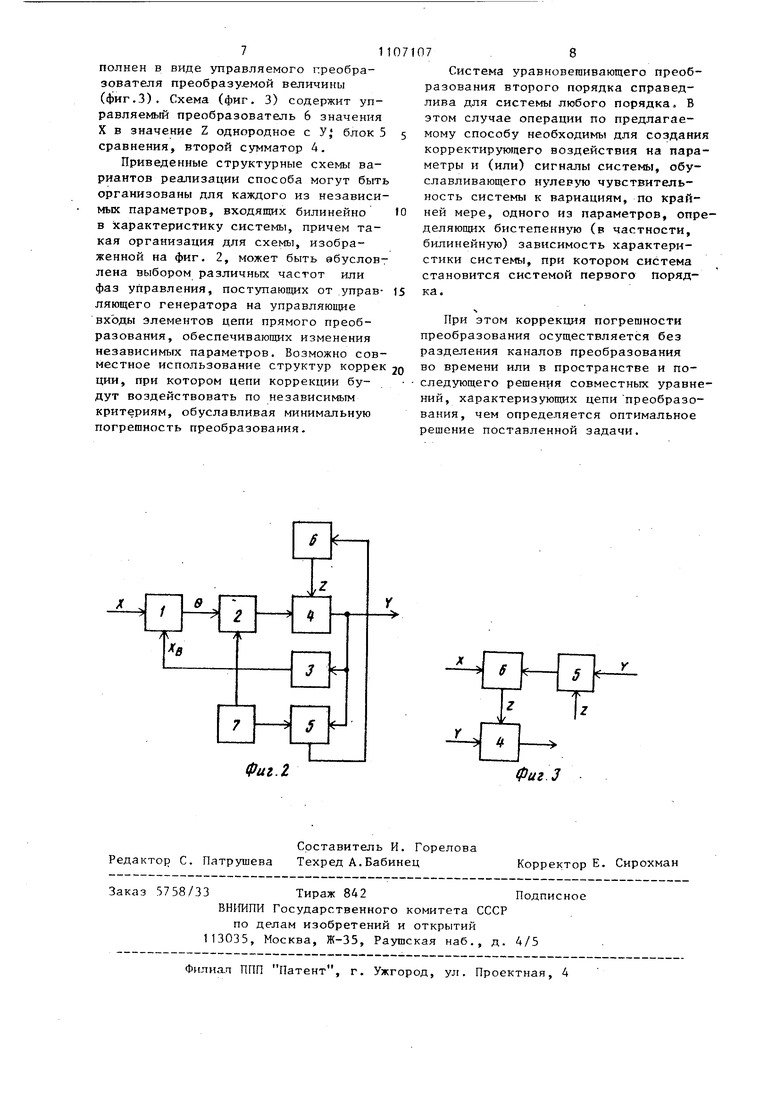
Фиг.1 1 Изобретение относится к адаптивны следящим системам, используемым в из мерительной технике, в системах урав новешивающего преобразования физичес ких величин. Известны способы коррекции погреш ности уравновешивающего преобразования физических величин, основанные н формировании корректирующего сигнала в контуре уравновешивания,- при которых коррекция осуществляется путем суммирования корректирующего сигнала с сигналом в контуре уравновешивания или управления параметром в контуре уравновешивания СП. Решение задачи коррекции в этом случае связано с созданием в соответ ствии с принципом инвариантности структурной избыточности, реализуемой при временном или пространствен/ном разделении каналов преобразова ния. При этом в качестве критерия регу лирования в адаптирующих обратных св зях используется некоторая функция от результата сравнения сигналов в разделенных каналах преобразования, корректирующий сигнал может также формироваться в специальном канале с заданной функцией преобразования (комбинированные системы), Недостатки таких известных способов заключаются в повышенных аппаратурных затратах и жестких требования к реализации параметров в каналах преобразования (при использовании пространственного разделения каналов преобразования, в недостаточных быстродействии и точности преобразований, связанных соответственно с коне ными частотами изменения параметров цепей преобразования и конечной чувс вительностью .каналов преобразования (при временном разделении каналой преобразования), в необходимости в ряде случаев специального канала с детермированной функцией преобразования для формирования корректирую щего сигнала, в существенном усложнении схемной реализации при необход мости -учета как минимум двух состояНИИ для каждого независимого парамет ра в многомерной задаче. Наиболее близким к изобретению по технической сущности является спо соб коррекции погрешности уравновешивающего преобразования физических величин, при котором корректирующий 7 .2 сигнал формируется при временном разделении каналов преобразованияL2j. При этом корректирующее воздействие, осуществляемое адаптирующей обратной связью,- обуславливается произведением усилений в контуре уравновешивания и в петле адаптирующей обратной связи. Временное разделение каналов преобразования определяет недостаточное быстродействие коррекции и возникновение динамической составляющей погрешности преобразования, Пель изобретения - повышение точности коррекции. Цель достигается тем, что согласно способу коррекции погрешности уравновеигивающего преобразования физических величин, основанному на формировании корректирующего сигнала в контуре уравновешивания, в контур уравновешивания вводят дополнительный кoppeктиpyюшJ й сигнал, образованный сравнением, например, по фазе исходного корректирующего сигнала с сигналом в контуре уравновешивания. Предложенный способ может быть пояснен следуюш 1ми соотношениями. Коэффициент уравновешивающего преобразования при использовании отрицательной или положительной обратной связи в контуре уравновешивания определяется соотношением где X, У - преобразуемая величина и ее преобразованное значение;S VC |Ъ - соответственно коэффици енты преобразования - результируюший, цепей прямого и обратного преобразования знаки (+), (-) - учитьгаают соответственно использование отрицательной или положительной обратной связи в контуре уравновешивания . При начальной неопредет/енности и ущественных параметрических возмуениях, при которых К5 var, з уравнения (1) следует, что параетрическая инвариантность (незавиимость значения от вариаций значеия К) может быть реализовано путем временного или пространственного раз деления каналов преобразования. В соответствии с предложенным спо собом упомянутая задача может быть решена следующим образом. При создаНИИ корректирующего сигнала в адаптирующей сигнальной обратной связи, суммируемого, например, с.результатом преобразования цепи прямого преобразования, в виде некоторой функции от результата сравнения корректирующего и выходного сигналов, уравновещивающее преобразование характеризуется системой уравнений: -X-Xji. Xjb-J Y, , . Z-Ko.a-, - a-Y-i-, где К, A, Ka коэффициенты, характеризую|цие цепи прямог и обратного преобразования- основного контур уравновешивания, конту ра адаптирующей обратной связи соответствен но; ь,1 соответственно преобра зуемый, компенсирукщий выходной и корректирую щий сигналы в основном контуре уравновваивания, сигналы некомпенсации в основном конту ре уравновешивания и в адаптирующей обратной связи, Рещеипем уравнений является соотношение-a x-jiKcxWC Kf-l ( определяющее сигнал некомпенсации в основном контуре уравновешивания через преобразуемый сигнал и сигнал некомпенсации в контуре адаптирующей обратной связи. Из уравнения (3) следует условие абсолютной инвариантности преобразованияX-j l4v-9-,, при котором 0,3 О, У Х/В, т.е. система становится одномерной (первого порядка). С учетом конечности усиления в контуре адаптипук-щей обратной связи, уравнер1ие (3) , обусловленное . - инвариантностью, будет представлять со бой соотношение а выходная йеЛнчина уравновешивающего преобразования - характеризоватЪ-; ся соотношением К{ ИСа1Х : / OKjbC vKa При HeKOTopoM $. f (.), являкнцимся критерием регулирования в адаптирующей обратной связи, способ позволяет реализовать - инвариантность уравновешивакицего преобразования без разделения каналов преобразования во времени или в пространстве. При этом в соответствии с принципом суперпозиции усиления в основном контуре уравновешивания и в контуре адаптирующей, обратной связи организуются по независимым критериям Q, (с9)и 02 (8;, что позволяет, реализуя существенно устойчивые контура, достичь минимальной погрешности преобразования. Количество контуров адаптирующей обратной связи и их организация могут быть различными, связанными с возможностями и практическими рекомендациями, обусловленными конкретными задачами. На фиг. 1 изображен один из возможных вариантов схемы для реализации способаJ на фиг. 2 и 3 т другой вариант схемы. Блок-схема содержит первый сумматор 1, цепи 2 и 3 прямого и обратного преобразования, характеризуемые коэффициентами К и (Ьсоответствен но, образукицие основной контур уравновешивания; второй сумматор 4, блок 5 сравнения, управляемый генератор 6, образующие контур адаптирующей сигнальной обратной связи с коэффициентом усиления Ка. Работа изображенной структуры описьшается уравнениями (2), при которых коррекция погрешности преобразования осуществляется путем введения в контур обратной связи корректирующего сигнала от управляемого генератора 6, сравниваемого в блоке 5 сравнения с сигналом в контуре обратной связи, образованным в результате воздействия корректирующего сигнала, при этом в дальнейшем корректирующий сигнал формируется в итеративном процессе в 5 виде некоторой функции от результата сравнения сигналов в блоке 5, выбран ной по критерию минимума среднего квадрата оигибки коррекции. Очевидно количество подобным образом организованных контуров адаптирующих обратных связей, вводящих корректирующий сигнал в сумматор на выходе цепи обратного преобразования или на входе цепи прямого преобразования, определяется необходимостью достижения минимальной погрешности преобразования. Возможно осутцествление коррекции погрешности преобразования с аналогичным эффектом путем организации подобных структур в адаптирующей обратной связи, выступающей в роли основного - исходного контура уравновешивания, например, в дискретных системах преобразования, характеризуемых чистой задержкой на время Т в контурах обратной связи и значениями Kaci, Ка . 1, определяемыми из условия устойчивости. . На фиг. 2 представлен другой вариант схемы для реализации способа. Блок-схема содержит первый сумматор 1, цепи 2 и 3 прямого и обратного преобразования 5 образующие основной исходный контур уравновещивания, вт рой сумматор 4, блок 5 сравнения, н пример, фазочувствительный выпрямитель с фильтром низких частот на вы ходе, управляемый генератор 6 корре тирующего сигнала и управляющий ген ратор 7, образующие адаптирующую об ратную связь. Схема работает следующим образом Если выходная величина схемы опр деляется соотношением Y - KXt-Ya ХьК где, в отличие от уравнения (1), Уа - абсолютная аддитивная составляю щая погрешности преобразования, прив денная к выходу цепи прямого преобра зования, то при периодическом воздей ствии управляющего генератора 7 на управляюпщй вход цепи 2 преобразования, относительное изменения выходного значения будет определяться зависимостью076 S относительное изменеш-ю коэффициента преобразования при вариациях значения К, обусловлепньгх воздействием генератора 7 на управлякш1, вход цепи 2 цреобразования 5 CS) -OS kC / , Як Ъ S-vC So. Ь функция относительной чувствительности, S Уа/Х, .К/К - относительное измeнeнv e варьируемого параметра, С четом вводимого В сумматор ч корректирующего сигнала от уцрав7 Яемого генератора 6, обусловленного воздействием блока 5 сравнения на уцравляюи ий вход генератора 6, выражение (8) может быть представлено в виде соотношения W V-. f-. х- ( -.} fe 1 S J Mt-vi c5 представляющего собой дискриминационную характеристику, где j.,,JbCYa.) л относительная погрешность воспроизведения значения X/ft , обусловленная существованием Уа и конечными значениями уси. в основном контуре уравновешивания, в контуре адаптирующей об11атной связи. Из уравнения (10) следует, что при о О выходная величина будет немодулированной при воздействии генератора 7 на цепь 2 преобразования, а при 0. О глубина и фаза модулированной составляющей выходного значения относительно управления, поступающего от генератора 7, будут определяться значением и знаком относительной погрешности V . Это позволяет целенаправленно возде 1ствовать ка генератор 6 Корректиру:о1цего сигнала выходом блока 5 сравнения, при котором выходная величина уравновешивающего преобразования определяется знач - - и ем у.21Пц. р ((ь(+ где Ка - усиление в контуре адаптпоующей обратной связи, В частном случае генератор 6 кор-ректирующего сигнала может быть вы711
полней в виде управляемого преобразователя преобразуемой величины (фиг.З). Схема (фиг, 3) содержит управляемый преобразователь 6 значения X в значение Z однородное с У блок 5 сравнения, второй сумматор 4.
Приведенные структурные схемы вариантов реализации способа могут быть организованы для каждого из независимых параметров, входящих билинейно в характеристику системы, причем такая организация для схемы, изображенной на фиг. 2, может быть абусловлена выбором различных частот или фаз управления, поступающих от управляющего генератора на управляющие входы элементов цепи прямого преобразования, обеспечивающих изменения независимых параметров. Возможно совместное использование структур коррек ции, при котором цепи коррекции будут воздействовать по независимым критериям, обуславливая минимальную погрешность преобразования.
П78
Система уравновешивающего преобразования второго порядка справедлива для системы любого порядка. В этом случае операции по предлагаемому способу необходимы для создания корректирующего воздействия на параметры и (или) сигналы системы, обуславливающего нулерую чувствительность системы к вариациям, по крайней мере, одного из параметров, определяющих бистепенную (в частности, билинейную) зависимость характеристики системы, при котором система становится системой первого порядка.
ч
При этом коррекция погрешности преобразования осуществляется без разделения каналов преобразования во времени или в пространстве и последующего решения совместных уравнений, характеризующих цепи преобразования, чем определяется оптимальное решение поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции погрешности урав-НОВЕшиВАющЕгО пРЕОбРАзОВАНия физи-чЕСКиХ ВЕличиН | 1977 |
|
SU798657A1 |
| Устройство для уравновешивающего преобразования физических величин и их измерения | 1977 |
|
SU763801A1 |
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1980 |
|
SU1335883A2 |
| Силоизмерительное устройство | 1981 |
|
SU979899A1 |
| Измеритель активной и реактивной составляющих полного сопротивления | 1981 |
|
SU978070A1 |
| Генератор-калибратор уровня | 1986 |
|
SU1383319A1 |
| Устройство для измерения электрических величин | 1987 |
|
SU1525592A1 |
| Калибратор переменного напряжения | 1983 |
|
SU1094025A1 |
| Способ определения параметров силоизмерительных устройств с электросиловым уравновешиванием и стенд для его осуществления | 1987 |
|
SU1530958A1 |
| Весы с электромагнитным уравновешиванием | 1987 |
|
SU1552012A1 |
СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТИ УРАВНОВЕШИВАЮЩЕГО ПРЕОБРАЗОВАНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН, основанный на формировании корректирующего сигнала в контуре уравновешивания, отличающийся тем, что, с целью повышения точности коррекции, в контур уравновешивания вводят дополнительный корректирующий сигнал, образованный сравнением, например, по фазе исходного корректирукщего сигнала с сигналом в контуре уравновешивания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Туз Ю.М | |||
| Структурные методы повьштения точности измерительных устройств | |||
| Киев, Вища школа, 1976, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ стабилизации коэффициента преобразования | 1973 |
|
SU477389A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| . | |||
