(54) УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАЮЩЕГО ПРЕОБРАЗОВАНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН И ИХ ИЗМЕРЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1977 |
|
SU1107107A1 |
| Устройство для централизованного контроля | 1973 |
|
SU479119A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ПОДАВЛЕНИЯ ФИЗИЧЕСКИХ ПРОЦЕССОВ (ПОЛЕЙ) ОКРУЖАЮЩЕЙ СРЕДЫ САМОНАСТРАИВАЮЩИМСЯ ОПОРНЫМ ПРОЦЕССОМ (ПОЛЕМ) | 2008 |
|
RU2391678C2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1980 |
|
SU1335883A2 |
| Устройство для контроля и измерения параметров | 1980 |
|
SU947833A1 |
| Устройство для централизованного контроля | 1974 |
|
SU652570A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Способ коррекции погрешности урав-НОВЕшиВАющЕгО пРЕОбРАзОВАНия физи-чЕСКиХ ВЕличиН | 1977 |
|
SU798657A1 |
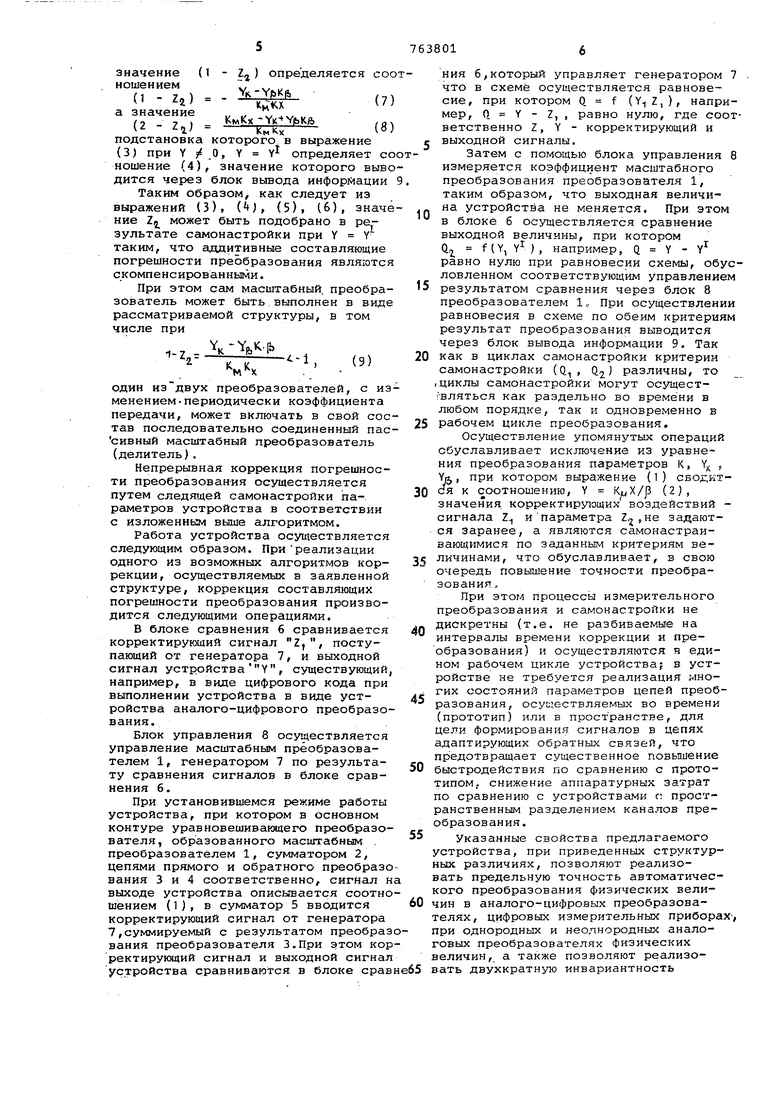
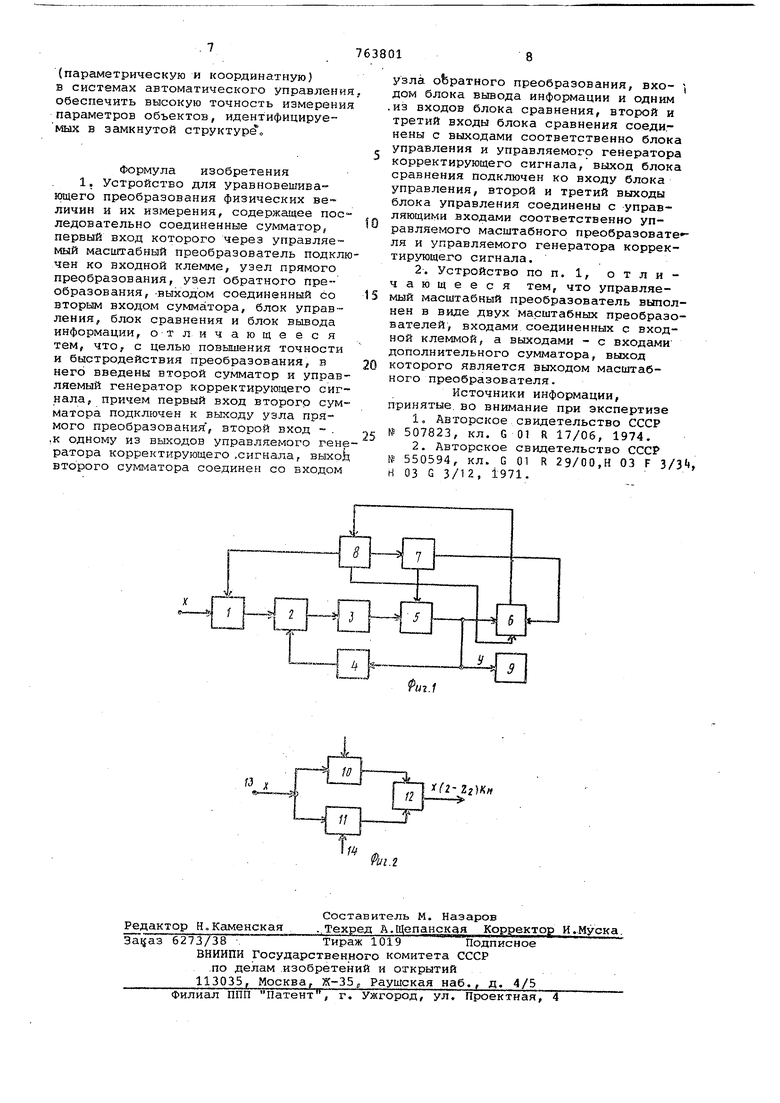
Изобретение относится к иэмерительной технике, а именно к средствам измерительного преобразования фи зических величин и их измерения как с аналоговым, так и с цифровым выходом, и может быть использовано в згщачах автоматического управления Известны устройства уравновешивающего преобразования физических величин, в которых коррекция мультипликативной и аддитивной составляющих погрешности преобразования осуществляется благодаря созданию во времени ИЛИ в пространстве дополнительных каналов преобразования при реализации специальных алгоритмов коррекции осуществляемых в дополнительных струк турах ИЛИ вычислительными операциями Основными недостатками известных устройств ЯВЛЯЮТСЯ: при использовании пространственног .разделения каналов - практически, более, чем удвоенные аппаратурные затраты, возникновение ужесточенных требований к настроечным характеристи кам каналов преобразования; при временном разделении каналов потери быстродействия, связанные q конечными частотами параметрической МОДУЛЯЦИИ (необходимостью при каждом измерении иметь достаточно большое количество состояний модулируемых параметров 1. Наиболее близким по технической сущности является устройство для уравновешивающего преобразования физических величин и их измерения, содержащее последовательно соединенные сумматор, первый вход которого через управляемый преобразователь подключен ко входной клемме, и узел прямого преобразования, узел обратного преобразования, выходом соединенный со вторым входом сумматора, блок управления, блок сравнения и блок ввода информации 2. Недостатками такого устройства являются недостаточные быстродействия и точность преобразования. Цель изобретения - повы1иение точности и быстродействия преобразования. Цель достигается тем, что в устройство ДЛЯ уравновешивающего преобразования физических величин и измерения, содержащее последовательно соединенные сумматор, первый вход которого через управляемый масштабный преобразователь подключен ко входной клемме, и узел прямого преобраэования, узел обратного преобразования, выходом соединенный со вторым входом сумматора, блок управления, блок-сравнения и блок вывода информа ции, введены второй сумматор и управляемый генератор корректирующего сигнала, причем первый вход второго, сумматора подключен к выходу узла пр мого .преобразования, второй вход к одйому из выходов управляемого генератора корректирующего сигнала, выход второго сумматора соединен со входом узла обратного преобразования входом блока вывода информации и одним из входов блока сравнения, второй и третий входы блока сравнения соединены с выходами соответственно блока управления и управляемого гене ратора корректирующего сигнала, выхо блока сравнения подключен ко входу блока управления, второй и третий выходы блока управления соединены с управляющими входами соответствующего управляемого масштабного преобразователя и управляемого генератора корректирующего сигнала; кроме того, управляемый масштабный преобразователь выполнен в виде двух масштабных преобразователей, входами соединенны с входной клеммой а выходами - с вх дами дополнительного сумматора, выхо которого является выходом дополнител ного сумматора,выход которого являе ся выходом масштабного преобразователя. На фиг. 1 представлена структурная электрическая схема устройства; на фиг. 2 - структурная схема управляемого масштабного преобразователя. Устройство для уравновешивающего преобразования физических величин и их измерения содержит правляемый масштабный преобразователь 1 с коэффициентом передачи Kj, сумматор 2, цепи прямого 3 и обратного 4 преобразования, характеризуемые коэффициентами, преобразования Кир, второй сумматор 5, блок 6 сравнения, управляемый генератор 7 корректирующего сигнала, блок 8 управления, блок 9 вывода информации. На фиг. 2 показаны первый 10 и вт рой 11 масштабные преобразователи, .дополнительный сумматор 12, управляю щие входы 13 и 14 масштабных преобразователей. Работа предлагаемого устройства может быть пояснена следующими соот ношениями. Коэффициент преобразования уравн вешивающего устройства при использований отрицательной обратной связ определяется вырг1жением е У - - 5к - -Х i4K-g де X, Y -соответственно преобразуемая величина и ее преобразованное значение; 3 - коэффициенты преобразования - результирующий, цепей прямого и обратного преобразования соответственно; ) абсолютые аддитивные составляющие погрешости преобразования цепей прямой и братной связи, приведённые соответтвенно к выходу цепи прямого и ко ходу цепи обратного преобразования, читывающие дрейф нуля соответствуюих цепей, в т.ч. сумматора на входе. Основная задача построения точных змерительных преобразователей сводитя к устранении тем или иньгм путем лияния неконтролируемых вариаций знаений К 1 и. В предлагаемом устройстве, реализующем соотношение (1), указанная заача решается следующим образом. При введении сигнала от корректиующего генератора сигналов 7 в сумматор 5, при выполнении условия де ZT -значение корректирующего сигнала, обусловленного воздействием блока 6 сравнения через блок 8 управления на генератор 7, выражение (I) принимает вид Результат, полученный в выражении (4) может быть реализован также и при уравнении по изложенной выше методике масштабным преобразователем или параметром цепи прямого преобразования. При KPJ К„.(2 - 1) , обусловленном включением двух параллельных масштабных преобразователей Фиг. 2) 10 и 11 с коэффициентами передачи 1, к К, (I - Zgl к сумматору 12, при периодическом изменении коэффициента передачи одного из масштабных преобразователей от О до Кц, (t - 22), где 1,2. задаваемое с помощью блока 8 управления, значение, при котором Y Y,(5) оцениваемом в блоке сравнения в соответствии с командой управления, поступающей из блока 8 в блоки б и 1, где Y- - значение выходной величины при К(2 -,Z), выралсение (5J будет иметь вид . (6} Это объясняется следующими соотношениями , При Y в о, К Kjrt (1 - 2ji) значение (1 Zj) определяется со ношением Т, .. ( - 2) - Ц (7 ( .K .. (2 - Zjj (мКх подстановка которого в выражение (3) при Y 7 О, Y Y определяет со ношение (4), значение которого выво дится через блок вывода информации Таким образом, как следует из выражений (3), С), (5), (6), значё ние Zj может быть подобрано в результате самонастройки при Y У таким, что аддитивные составляющие погрешности преобразования являются скомпенсированными. При этом сам масштабный, преобразователь может быть выполнен в виде рассматриваемой структуры, в том числе при ,-z, i-.., один из двух преобразователей, с из менением периодически коэффициента передачи, может включать в свой сос тав последовательно соединенный пас сивный масштабный преобразователь (делитель), Непрерывная коррекция погрешности преобразования осуществляется путем следящей самонастройки па-. раметров устройства в соответствии с изложенным выше алгоритмом. Работа устройства осуи ествляется следующим образом. Приреализации одного из возможных алгоритмов коррекции, осуществляемых в заявленной структуре, коррекция составляющих погрешности преобразования производится следующими операциями. В блоке сравнения 6 сравнивается корректирующий сигнал Z,, поступающий от генератора 7, и выходной сигнал устройства Y, существующий например, в виде цифрового кода при выполнении устройства в виде устройства аналого-цифрового преобразо вания. Блок управления 8 осуществляется управление масштабным преобразователем 1, генератором 7 по результату сравнения сигналов в блоке сравнения 6. При установившемся режиме работы устройства, при котором в основном контуре уравновешивающего преобразователя, образованного масштабным . преобразователем 1, сумматором 2, цепями прямого и обратного преобразо вания 3 и 4 соответственно, сигнал н выходе устройства описывается соотно шением (1), в сумматор 5 вводится корректирующий сигнал от генератора 7,суммируемый с результатом преобраз вания преобразователя З.При этом кор ректирующий сигнал и выходной сигнал устройства сравниваются в блоке срав ния б,который управляет генератором 7 что в схеме осуществляется равновесие, при котором Q f (,), например, О Y - Z,, равно нулю, где соответственно Z, Y - корректирующий и выходной сигналы. Затем с помощью блока управления 8 измеряется коэффициент масштабного преобразования преобразователя 1, таким образом, что выходная величина устройства не меняется. При этом в блоке 6 осуществляется сравнение выходной величины, при котором Q,2 f(Y, Y), например, Q Y - Y равно нулю при равновесии схемы, обусловленном соответствующим управлением результатом сравнения через блок 8 преобразователем 1 При осуществлении равновесия в схеме по обеим критериям результат преобразования выводится через блок вывода информации 9. Так как в циклах самонастройки критерии самонастройки (Q, , Q,) различны, то г циклы самонастройки могут осущест;вляться как раздельно во времени в любом порядке, так и одновременно в рабочем цикле преобразования. Осуществление упомянутых операций обуславливает исключение из уравнения преобразования параметров К, Y. . Yrt,, при котором выражение (1) СБОДКТся к соотношению, Y KuX/|3 (2J, значения корректирующих воздействий сигнала Z ипараметра Z,не задаются заранее, а являются самонастраивающимися по заданным критериям величинами, что обуславливает, в свою очередь повышение точности преобразования. При этом процессы измерительного преобразования и самонастройки не дискретны (т.е. не разбиваемые на интервалы времени коррекции и преобразования) и осуществляются в едином рабочем цикле устройства в устройстве не требуется реализация JMHOгих состояний параметров цепей преобразования, осукествляемых во времени (прототип) или в пространстве, для цели формирования сигналов в цепях адаптирующих обратных связей, что предотвращает существенное повышение быстродействия по сравнению с прототипом, снижение аппаратурных затрат по сравнению с устройствами г: пространственным разделением каналов преобразования. Указанные свойства предлагаемого стройства, при приведенных структур™ ых различиях, позволяют реализоать предельную точность автоматичесого преобразования физических велиин в аналого-цифровых преобразоваелях, цифровых измерительных приборах-, ри однородных и неолнородных аналоовых преобразователях физических еличин, а также позволяют реализоать двухкратную инвариантность
