Изобретение относится к технике электроизмерений и может быть использовано в измерительных преобразователях, в частности неэлектрических физических величин в электрические, а также в адаптивных следящих системах и является усовершенствованием изобретения по авт.св.№1107107.
Цель изобретения - повышение точности коррекции путем формирования дополнительного корректирующего сигнала из входной физической величины.
Способ коррекции погрешности уравновешивающего преобразования физичес ких величин заключается в уравнове- шивагацем преобразовании входной физической величины при одновременном суммировании результата прямого преобразования с основным корректирующим сигналом, образованным путем сравнения упомянутого корректирующего сигнала с выходным сигналом и усиления результата сравнения.При этом результат прямого преобразования суммируют также с дополнительным корректирующи сигналом, который формируют путем прямого преобразования разности входной величины и результата обратного преобразования дополнительного корректирующего сигнала.
На чертеже приведена структурная схема устройства для осуществления способа.
Устройство содержит первый сукгма- тор 1, основные прямой 2 и обратный 3 преобразователи, второй сумматор 4 блок 5 сравнения, усилитель 6, третий сумматор 7, дополнительные прямой 8 и обратный 9 преобразователи. Первые входы сумматоров 1 и 7 объединены (ежду собой и являются входом устройства. Выход первого сумматора 1 через прямой преобразователь 2 соединен с входом сумматора 4, выход которого является выходом устройства.
Кроме того, выход сумматора 4 соединен через обратный преобразователь 3 с вторым входом сумматора 1 и непосредственные - с первым входом блока 5 сравнения. Выход блока 5 сравнения соединен с входом усилителя 6, выход которог о подключен к второму входу блока 5 сравнения и второму входу сумматора 4. Выход сумматора 7 через дополнительный прямой преобразователь 8 подключен к третьему входу сумматора 4, который через до
10
15358832
полнительный обратный преобразователь 9 подключен к второму входу сумматора 7.
Устройство работает следующим образом.
Сумматор 1, основные прямой 2 и обратный 3 преобразователи образуют основной контур уравновешивающего преобразования. Блок 5 сравнения и усилитель 6 вместе с сумматором 4 образуют контур адаптирующей сигнальной обратной связи, в котором формируется основной корректирующий сиг
новного прямого преобразования. Сумматор 7, дополнительные прямой 8 и обратный 9 преобр азователи образуют дополнительный контур уравновешивающего преобразования, обозначенный на чертеже М. Преобразование входной физической величины Х(р) в дополнительном контуре описывается уравнением, в котором используются изображе- ния по Лапласу физических величин и характеристик блоков
- т-.Л-:.Ш Ч„-). )
.V,(P)K,(P)
где Y(p)
КМ,(Р),К(Р) результат дополнительного прямого преобразования величины Х(р); передаточные функции соответственно прямого 8 и обратного 9 преобразователей.
40
В основном контуре уравновешивания входная физическая величина преобразуется аналогично, но после прямого преобразования к полученному результату кроме основного корректирую щего сигнала, формируемого в контуре адаптирующей сигнальной обратной связи, добавляется дополнительный корректирующий сигнал Y(p) . В результате математическое выражение
50 для выходной физической величины Y(p) без учета влияния основного корректирующего сигнала имеет вид
у.„чЁ()(2) Х()
Р- 1 к,(р)-к(р) )
(2)
5(2) I
НК,(р)К(р) ,(р)-К(р))
где Kj(p),K,(p) - передаточные функции соответственно прямого 2 и обратного 3 основных преобразователей, (р) - погрешность коррекции, обусловленная конечным усилением в петлях обратной связи основного и дополнительного контуров уравновешивания.
Из соотношения (2) следует, что погрешность уравновешивания уменьшается в L +K,(p)Kjyj(p)j раз. Кроме того, характеристическое уравнение
кК,(р)К(р)и-К(р)К,(р)0,(3)
имеет корни , соответствующие корням уравнений основного и дополнительного уравновешивающих преобразований, что обуславливает отсутств противоречий между требованиями минимизации погрешности и устойчивости контуров уравновешивания.
Таким образом, отличия способа обеспечивают уменьшение погрешности коррекции и, следовательно, повьш1аю ее точность.
Указанный прием может быть повторен в итерационном процессе. В этом случае корректирующий сигнал формируется путем прямого и обратного преобразований дополнительных корректирующих сигналов, каждый из котрых вводится из предыдущего контура уравновешивания в последующий путем суммирования результата прямого преобразования последующего контура с выходным сигналом предьщущего контура.
Редактор П.Гереши
Составитель А.Пучковский
Техред В.КадарКорректор В.Бутяга
Заказ 4043/38 Тираж 730Подписное
ВШИЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
В этом случае выходная физическая величина может быть описана следующим выражением
где J п-1,.
п - число контуров уравновешивания, включая основной;
i, j - порядковые номера контуров уравновешивания; §ц(р) - шумы контуров, приведенные к выходу.
Из выражения (4) следует, что погрешность при этом еще более уменьшается, -а точность коррекции увеличивается.
Кроме того, в каждом дополнительном контуре уравновешивания возможна коррекция его выходного сигнала посредством адаптирующей сигнальной обратной связи, как это осуществляется в основном контуре.
Ф.ормула изобретения
Способ коррекции погрешности уравновешивающего преобразования физи- ческих величин ло авт.св. № 1107107, отличающийся тем, что, с целью повьшзения точности коррекции, результат прямого преобразования суммируют с дополнительным корректирующим сигналом, который формируют путем прямого преобразования разности входной физической величины и результата обратного преобразования дополнительного корректирующего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1977 |
|
SU1107107A1 |
| Устройство для уравновешивающего преобразования физических величин и их измерения | 1977 |
|
SU763801A1 |
| Способ коррекции погрешности урав-НОВЕшиВАющЕгО пРЕОбРАзОВАНия физи-чЕСКиХ ВЕличиН | 1977 |
|
SU798657A1 |
| Рециркуляционный преобразователь напряжения в код двойного уравновешивания | 1980 |
|
SU884129A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2341805C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Преобразователь напряжения в код | 1980 |
|
SU884126A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1552377A1 |
Изобретение относится к области электроизмерений и может быть использовано в измерительных преобразователях неэлектрических физических величин в электрические, также в адаптивных следящих системах. Цель изобретения - повышение точности коррекции - достигается путем формирования дополнительного корректирую -ii(P) щего сигнала из выходной физической величины. Способ заключается в уравновешивающем преобразовании входной физической величины при одновременном суммировании результата прямого преобразования с основным корректирующим сигналом, образованным путем сравнения упомянутого корректирующего сигнала с выходным сигналом.и усиления результата сравнения. Затем ре- зулЬтат сравнения суммируют с дополнительным корректирующим сигналом, который формируют, путем прямого пре™ образования разности входной физи- ческой величины и результата обратного преобразования дополнительного корректирующего сигнала. Устройство для осуществления способа содержит сумматоры 1, 4 и 7, основной прямой 2, и основной обратный 3 преобразователи, блок 5 сравнения, дополнительный прямой 8 и дополнительный обратный 9 преобразователи. 1 ил.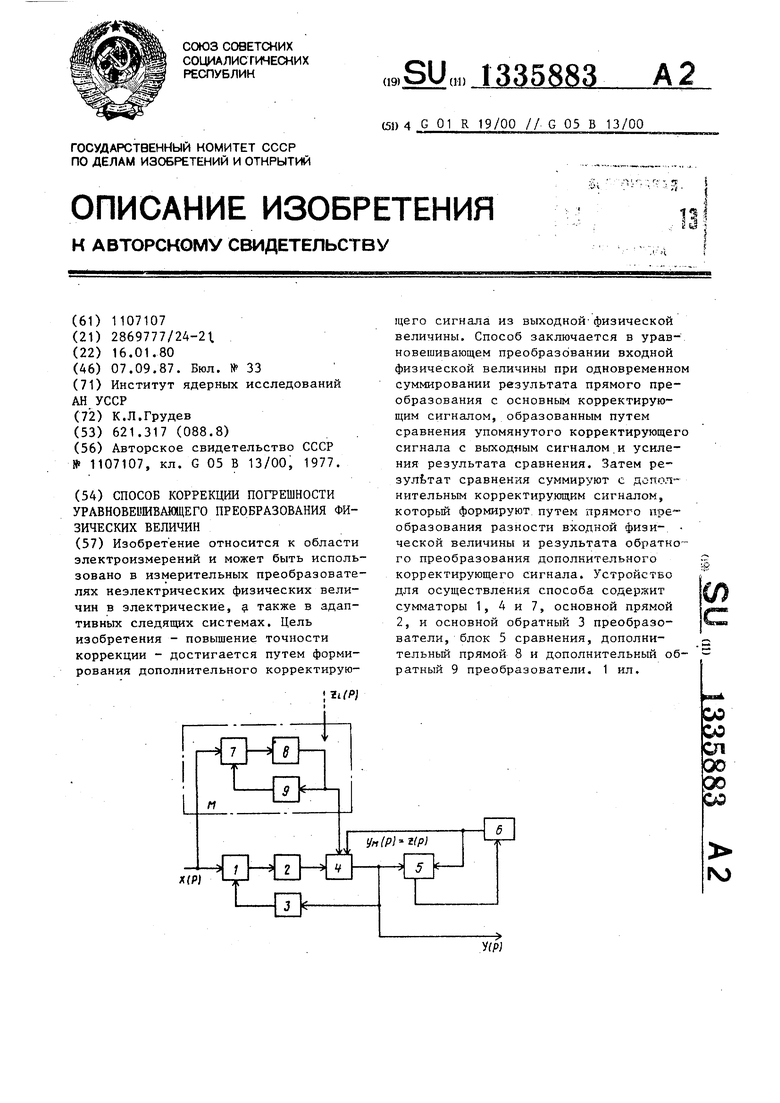
| Способ коррекции погрешности уравновешивающего преобразования физических величин | 1977 |
|
SU1107107A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
