:оединсньг соотве-С -я;/г,Г1;, г чходы 5з.-ок;г: оЬузйткого
1рео6разования, нхо,№: :.1оц--:пт- ;1 ь- к датмкам тока статора и фор1« гф.1аа елай г рмО1шкег;кил
{зуНКЦИЙ, при этом ВЬКХЛД ;;i5ii S:4Jji продольной CCCfSB
тяющей тока статора 6j(Oi;.; ...HJjj /ftioro преобраззиакщ. ;оединен также с регулятором возбуждения, один из зходов которого подключен к. кыкоду сигнала уирзл ления поперечной составля.г:1-ие;й э ;жа статора выгаслительного устройств т :,;: V извлечения зсо| няквадра|-}-чло и ..jv -: ,:: . . .йДрат,адругОй.вход подк люн:rf --: выходу (;иг, i ,: . ;У :чнйя продольной ;ocTaBji}iioi ueH тока ciaTOjsa вы С11Ительного устро :тва, реализующего, например, i-ii:;/i,yrou4He соотношегшя между сигналами на вход .-: виходах:
а-и
т
а.
t) о.- и «
где и - сигнал на входе В1:гчр Л1м пильного устройства,
1 - сигнал уг((Я иеперечной составляющей тока статора IK. одк:ом выходе вы: А сли1-с, I ьк(.:Г. у i, (Юй с л ;; ,
i - скгнал угф-авлеция npfJij -.пой :с5(г;авляю60
шеи тока стато;;;; «З npyi. ..т вьжоде вычислительноп; ;..-;7
Q и b - ко ффицирнта. Bo-srap X, тем, что S электроприводе ттл-. ::, ДЕЙ б/е-- -i умножения, два блока диг|;ф::|,-Г(|роряв.я к фор- эииователи пуперечной и плидольной сосгавлягищих яотокос },еШ)е НИИ статора, ет-гхол каждого ю KOTOphn сое,1данен с соотвстг гвуronUjы мv-.nfroрпио гд ubjю-иитетральным регулятором чсрс J исрный exoii о1дного блока умножения и о/шн блок ди4 ф:Г -:.1 чход формирователя поперечной 1 :::-1 : (;-, НОТОКОСПСПЛРния статора пoдкJ ro te к s-,:.;: ;-.у 1:иг}1ала яокеречноя составляющей тока ста го; :, : -:. Яр;т;яо;. о пеоора:© вания, к выходу сигнала продоньной составляющей тока статора которого по|тключек форрдирователь продопьной гоставляюшей потокосдепле}я-й статора, соединенный также с датчмком тока роторя. прл -том вторые входы блоков умножения ио/жлючены к датчику скорости. В-третьих, тем, что применепь: ; €менты ИЛИ , блок деления, задатчик опорной скорости, квадратор, нелинейный элемент, за,дат1пяк постоянного сигнала, нодключе Ш1,ш ко входу блока извлечения корня квадратного через квадратор и вход делимого блока деления, вход, делителя которого подключен через один вход элемента ИЛИ к задатчику опорной скорости, а через другой вход ;м гмента ИЛИ и нелинейный элемент к задатчику интенсивности.
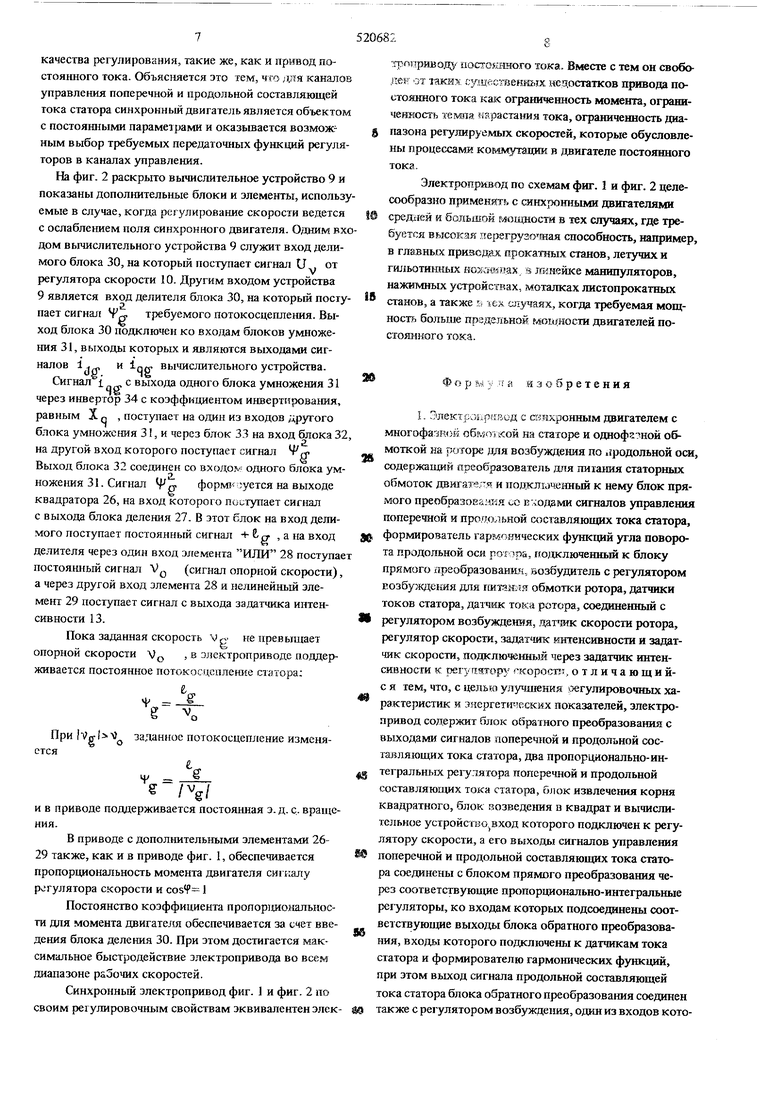
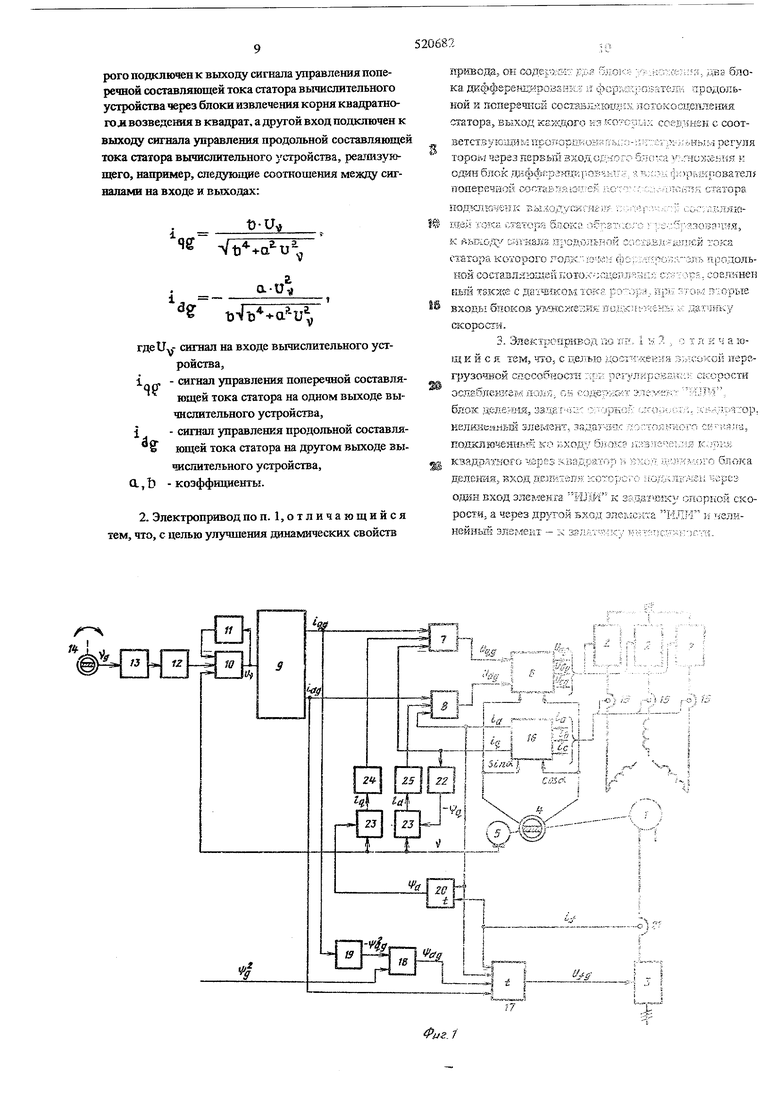
На фиг. 1 показана функциональная схема J „ привода, в котором управление скоростью npnii-i дится при изменении напряжения на статоре без L и бдения поля возбужде1шя синхронного двигателя л фиг. 2 - функциональная схема, рчскрьшающая зле s
ipi ir;;:5ou., з ;:;С; IonoM уяркеш-акк скоростью в некотоr;.:jM д;-1апазойе сиср;.:.ст;-Ж; ЕгдетС; : с ослаблением поля ::;;: з6уждения синхрокного двигателя.
4fif i-potoiiF--- --.----pw-r гчнхронный двигатель 1 IP I на «агоре и однофазной на рсторр 41, I t ;i продольной осью
I ) ) статический преibpd 1 j.wit,r(b f (1 t лига, орныхобмоток, i т однофазных лре будитель 3 для
ft-i/i-Km ijvS-bvo,./:: I-;: -яг; лкгр шрозательгармонн4ecKM;if фукгць й 4 f ; -;;:ii .ь: ) угла поворота
сА- йродь)гь);я,гй ,д.п d cavopa; датчик скорости 5 V , й- рия-ар гаилгенсратср постоянного тока; блок крккш-о ;-;:,со-Ьгз. 6 со входами сигнялор yjiip:ya f:f-ij,:;:, :; u,,,.,. к У) поперечной
:а YvpoiicaioROiS «I-K;.); : яяв;- vo;:C8 статора; пропор)циовал.ьчс-жяхегрл5&л:1: ;; :-N ;-.-л.;ет.:ч«ы 7 и 8 поперечной
и проЕСЛьной СОЕ::Г:- Й.-, г;ч1.-л: :f:..ca статора; вычисли., ,
Tersvff--: П7-3Г; г :- :-:- y -:- /.ifm сигналов управления
( iqjf, И 1 ; isjntv-i fHDS и продольной составляющих ,:(tv.,:i,,ia; регулятор скорости 10; ограничи.тель i йЫ5одл регулiJTCpa 10; фжпьтр 12; задатчик Пинтенсивк./: - .ч: - адаттеж 14 скорости Vд. ротора: да-,гчики токов 15 1,, ,J j,i,. статора; блок 16 ofc;.a- i:-:::- :n . i; Вь;х.эдами сигналов ( iq - ) по таречной и продольной составляюздих тока статора; :рр:.Г:7йтор 17 возбуждения; блок 18 шз:1ече131яксркя -чкдргиного; блок 19 возведения в квадрат; форки -;;э. 20 продольной составnsTOiiflf- r:j.-:of:ir,-;;:r, -:- , статора; датчик тог 21 i роюра; формчшватель 22 поперечной составляющей потехосцеп.пеыия ф „ статора; бло
ки 23 умиожеив;, &;1|о:«.7л 24., 25 ,-гфферешдарования; етадратор 26; блок 27 ;1;елешц; Э1;емент ИЛИ 28; лЛлкнейнысй элйменг , йслижна выходного сигнала tv:in.-iOpi:ro 1 .--:.:.,, Svhy, Н:сйк1;:1 „че входного сигнаj a, г знак выходкиго сигнала не зависит от знака входного; йлок 30 вычислительного устройства 9; fi;jr-KH множевй 31 яычислитедьного устройства 9; tvvfiK к: впечевия 32 ;к:ор}дя квадратного вьгчислительггого ycrpoF CTBa 9; блок 33 возведеьшя в квадрат вы;«:аштгльйого устройства 9; инвертор 34 вычислительного уг:тройства 9
Электропривод работает ;;1Ае;тующим образом. Сигнал задания скоро :::ти Vp- в виде далряженчя ностоянRCiFo тока от задатаджа скорости 14 через задатчик интеач ивности 13 и фкльтр 12 нс„.- упает на вход регулясора скорости Ю, где срчвничается с сигналом обратной связи скорости V ротора, поступающим от тахогенерахора 5. Дня ограничения величины выходного сигнала регуляторг 10 в его цепи обратной связи иснользуйтся ог|.чшичитель 11,
Сигвал и с выхода регулятора 10 поступает в вычислитольное усхройсгао 9, которое имеет два выхода. Ш первом выходе имеется сигнал i on; управления поперечной составляющей тока статора, н: втором - сигнал 1 , управления продольной составляющей тока статора, при этом
bUv
aU
где CL - коэффидискт, определяемый параметрами
синхронного двигателя;
Ь - коэффициент, зависящий от величины требуемого потокосцепления статора Ч. Сигналы с выходов с вычислительного устройства 9 поступают на соответствующие пропорпионально-интггралъные рггуляторы 7 и 8, а также на блоки 17 и 19.
С выходов регуляторов 7 и 8 сигналы Uqg и U. поступают в блок прямого преобразования 6, на два других входа которого поступают от формирователя 4 гармонические фу1жции угла поворота dL продольной оси ротора.
; г.
ij cosoL + (a.- i
-f iaSiii V()p Указашгые сигналы поступают на соответствующие регуляторы 7 к 8 и тем самым обеспечивается питание обмоток статора токами в соответствии с сигналами чё - Питание обмотки ротора требуемым током осуществляется возбудителем 3, управление которым производит регулятор 17. Сигналами задания для регулятора 3 служат сигналы ij У1 , при этом сигнал f J формируется на выходе блока извлечения корня квадратного 18, на входы которого поступают сигналы ф у (сигнал задания потокосцепления ) «- 9g-i Для полу 1ения сигнала Ф q р- служит блок возведения в квадрат 19, на вход которого поступает сигна Чё- - Сигналами обратной связи для регулятора 17 являются сигналы i м i - (последний поступает с датчика тока ротора). Для того, чтобы улучшить динамические свойства электропривода за счет компенсации э. д. с. вращения в контурах регулирования токов статора, применены два контура положительной обратной связи, одан из которых содержит формирователь 22 поперечной составляющей потокосцепления статора, один блок умножения 23 и блок дифференцирования 25;а другой - формирователь 20 продольной составляющей
о. а - - ц - -Е1Г.
и и cosfoL-- }- {i ,/-.-, i: op- ао 5 / РРV- ч
cg
со орьге лвяяк5тся j/Tipg, телек 2.
;1реобразсвзтели 2 зтктккл стйгар ьгс пйг.ютки двигателя токами i ,j , i,. ; i ., , хо торме одновремекБо измеряются цат-в-Екагки j 5.
Сигналы датчиков 15 поступают на входы блока обратного преобразовписг 16, нк дрзгие входы которого nocTyiiaioT гарможгческке фуакпун-г от формирователя 4.
ВыХОдаыС сигналь- с .,;:,:; 1о КЕЛ.ЧЬГ.Сл ГКГ1:-; ЦаМК
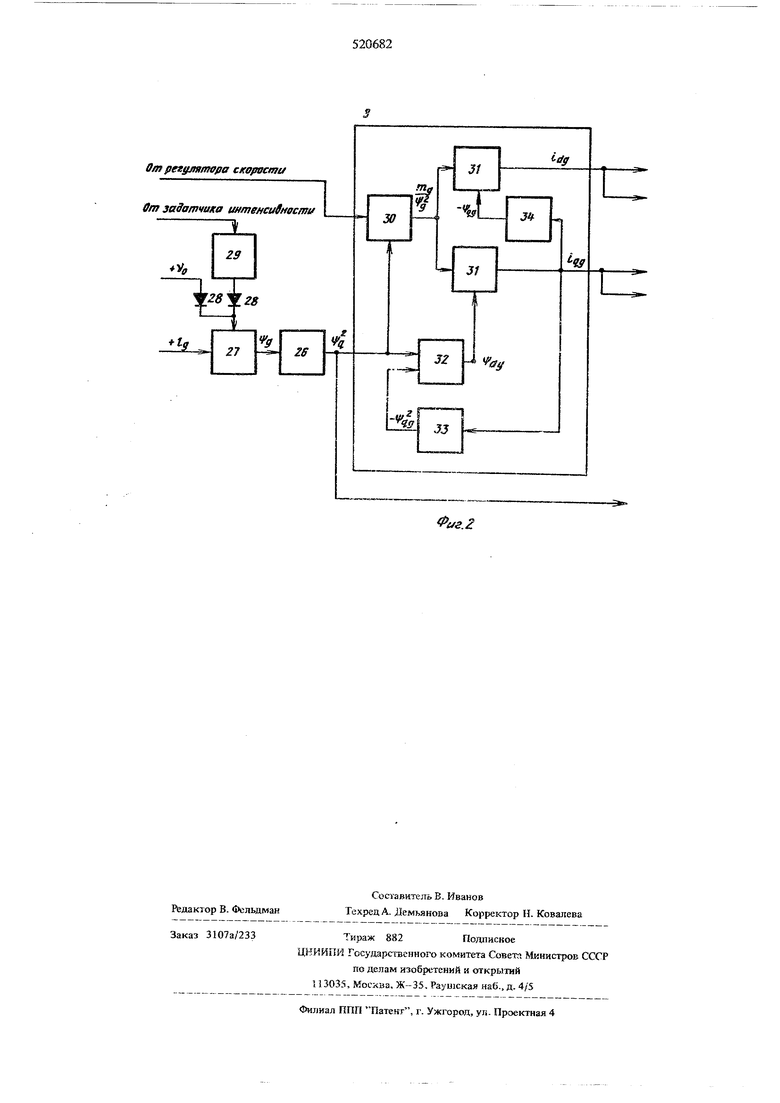
оЕраткой связи поперсч-о/: ::;, .о,,о1;г.ч:пг, .:.:,:/aяляющих ХОК8 статора к о6рг:зу:;чся Б соолпетстб;иМ со следующими вырЕжек; ямк; потокосдеплеш я статора, другой ЬЛ1}с уь.}лс;:с-, .;.i и блок дйфферсндироВЁНИя 24. На вход ibopv/-TVioBaтеля 22 ;.сстуикзт сигнал S. - , а иг :.io, фс:}н-аро;зг.теля 20-сигналь t .. и л..- , при JTO.; д.: г-..)г; о:.-тсг диффгре1ш;ирозая дч 25 :од..тю;е г гсо .:;}:о;;у XryjFKTCра 3. Е выход блока 2 - ко i/iO.;:,;: -i.- ..ч;: /. Пзредаючаьж фуккщчй 6л;.)Коз 2- и 25 в зб ранися обратными дергдиточным функ1,1-1ям р гула,оров. 7 и S соотзе1ст,;нао. Дгш зстаковиЕнихся релшмов работы электропривода и при а Xq к b -i-p. где S j - поперечный реактанд синхродкого даигателя., а -frr - фзбуекое потокосдеплсние, .v-o vseKT на заду звигатедя пропорционален смгпглу Ь,, регулятора сксзосгк 1C,;. дзиптеля равен едиш1де. Кроме ого, потокаодеп.г;е1-тт-1я стзторг: ,. в любок устаноБКзшемся резто к ;тоддер)жзякТ:;я постсят гкыми. Это з:1«1ит, что при иекзмежюк скорости двигателя э. д. с. враьдйштя оказ.-взсгсг лостоянной, а нглряже1-1ис стггпра при измепс ;ки т-агрузки изменяется только ка зедичкну пулеикк аапря гссиня на активном сопрот.г.здеш«:-1 статора и. с.:е;г,озатс,1;Е;ао, достигается экономичное кспользовакиг нйпряжеьжя, источников питания электро11ривод.а. Электропривод обеспешвзет высокие показа гели качества регулирования, такие же, как и привод постоянного тока. Объясняется это тем, что для канало управления ноперечной и продольной составляющей тока статора синхронный двигатель является объектом с постоянными параметрами и оказьшается возможным выбор трюбуемых передаточных функций регуля торов в каналах управления. На фиг. 2 раскрыто вычислительное устройство 9 и показаны дополнительные блоки и элементы, использ емые в случае, когда регулирование скорости ведется с ослаблением поля синхронного двигателя. Одним вх дом вычислительного устройства 9 служит вход делимого блока 30, на который поступает снгнал U-, от регулятора скорости 10. Другим входом устройства 9 является вход делителя блока 30, на который посту пает сигнал Vp. требуемого потокосцепления. Выход блока 30 подключен ко входам блоков умножения 31, выходы которых и являются выходами сигналов 1 и iqp. вычислительного устройства. Сигнал дд. с выхода одного блока умножения 31 через инвертор 34 с коэффициентом инвертирова1шя, равным X q , посту1тает на один из входов Ai,pjToro блока умножения 31, и через блок 33 на вход блока 32 на другой вход которого поступает сигнал Чд. Выход блока 32 соединен со входом одного блока ум ножения 31. Сигнал f форм ;;уется на выходе квадратора 26, на вход которого поступает сигнал с выхода блока деления 27. В этот блок на вход делимого поступает постоянный сигнал ст , а на вход делителя через один вход элемента ИЛИ 28 поступа постоянный сигнал V (сигнал опорной скорости), а через другой вход элемента 28 и нелинейный элемент 29 поступает сигнал с выхода задатчика интенсивности 13. Пока заданная скорость Vp не превышает опорной скорости V, , в электроприводе поддерь живается постоянное потокосцспление статора: H; gзаданное потокосцепление изменяиуи в приводе поддерживается постоянная э. д. с. вращения. В приводе с дополнительными элементами 2629 также, как и в приводе фиг. 1, обеспечивается пропорциональность момента двигателя сигналу регулятора скорости и 1 Постоянство коэффициента пропоргдаоналыюсти для момента двигате/ш обеспечивается за счет введения блока деления 30. При этом достигается максимальное быстродействие электропривода во всем диапазоне рабочих скоростей. Синхронный электропривод фиг. 1 и фиг. 2 по своим регулировочным свойствам эквивалентен элек п:зпириводз иосто ятаого тока. Вместе с тем он свободен от -таких су:ществе 5Шг1х недостатков привода постоянного тока как ограниченность момента, ограниченность хеадаа нарастания тока, огракичениость диапазона регулируемых скорюстей, которые обусловлены процессами коммутации в двигателе постоянного тока. Электропривод по схемам фиг. 1 и фиг. 2 целесообразно применят с синхронными двигателями среджй н большой мощности в тех случаях, где требуется высокая )егрузо ная способность, например, в главных призодак прокатных станов, летучих и гильотинных ножнйнах s ш шейке манипуляторов, нажимных устройствах, моталках листопрокатных станов, а также к lex случаях, когда требуемая мощность бо.пьше предельной моишости двигателей постоянного тока. : и изобретения I. Электрс-ирквод с с-звхронным двигателем с многофазной обкгпхой на статоре и однофг ной обмоткой на роторе ддя возбуждения по фодольной оси, содержащий преобразователь для пига1шя статорных обмоток двига1е;:я и иодклыченный к нему блок прямого преобразоЕа-жя со входами сигналов управления поперечной и продольной а:(ставляющих тока статора, формирователь гармонических функций угла поворота продольной оси ротора, подключенный к блоку прямого преобразовашш, возбудитель с регулятором Еозбу5кде1шя для 1ШТЯНЯЯ обмотки ротора, датчики токов статора, датчик тока ротора, соединенный с регулятором возбуждения, дагзик скорости ротора, регулятор скорости, задатчик интенсивности и задатчик скорости, подключенньш через задатчик интенсивности к регупятору гкоростл, отличающийс я тем, что, с целью улучшения регулирювочных характеристик и энергег№ еских показателей, электрюпривод содержит блок обратного преобразования с выходами сигналов поперечной и продольной состщ5ляющих тока статора, два пропорционально-интегральных регулятора поперечной и продольной составляющих тока статора, блок извлечения корня квадратного, блок возведения а квадрат и вычислительное устройство вход которого подключен к регулятору скорости, а его выходы сигналов управления поперечной и продольной составляющих тока статора соединены с блоком прямого преобразования через соответствующие пропорционально-интегральные pei уляторы, ко входам которых подсоединены соответствующие выходы блока обратного преобразования, входы которого подключены к датчикам тока статора и формирователю гармонических фз асций, при этом выход сигнала продольной составляющей тока статора блока обратного преобразования соединен также с регулятором возбуждения, один из входов которого подключен к выходу сигнала управления поперечной составляющей тока статора вычислительного устройства через блоки извлечешш корня квадратногол возведешш в квадрат, а другой вход подключен к выходу сигнала управления продольной составляющей тока статора вычислительного устройства, реализующего, например, следующие соотношения между сигпалами на входе к выходах:
t)-U
i. -
Ч -/t.
itx-U
сигнал на входе вычислительного устройства,
i - сигнал управления поперечной составляющей тока статора на одном выходе вычислительного устройства, i - сигнал управления продольной составля ющей тока статора на другом выходе вычислительного устройства, О., ti - козффидиенты.
2. Электропривод по п. 1, отличающийся м, что, с целью улучшения динамических свойств
привода, он соде1Ч;;а1 ;::::. чзюк: ка дкффере 1ЦИРоззБк.:г а фср;Шй: ной и нсперечксй coej:ssiiKjam-i. статора, выход каждого кз .
ветстзую;ал& &;прО7гарШ;озапм:пTopoivj через первый вход сщксяо
один блок Дифф;:реН1Ш:):ЮВЧ,Иг:;
поперечной составяягэгл-ек пот-г людвдшченк Еылодутжгяг:)}:;- v:::;,: пгей iOKa статора блок я j-iensivc:-; к г;ьс.&,ц;/ rarKaiia яродол&рпй со статора которого годк;-йэди сЬс; ион составлйгющвй котох сцеллг яый Т51сже с датчиком текг, ро-о входы блоков у нс/:гелия notxi скорости.
3, ЗлектрОПрНЕОД па л. щ и и с я тем, ЧТО; с делью г{зузочБой способно(Лп :::p;t РРгу, эспЕблеккем JioJiH; GS содер:.::С;т блох деле-аш, :занв;гч ::;. : :-Mpfiof
кeлкяeиiiый элемзнт, задатчкк л подклн ченн й ко ;;.ходу j
; квадратного через квйдрат ур v, о Ерлеггай, вход дезштепж котсрс,одйн вход злегленгй ИЛИ к ЗР ростИ; а через другой вход элем нейный элегдект - х зйяят -гк/ -:
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU518851A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Электропривод с синхронным двигателем | 1973 |
|
SU551785A1 |
/
I
U .
Л(
113 f L™.™.
От petyjmmopa с короста
