. . г; 13
I , | jW AA||wi7 -: }р- -ь-,-
ШРГ
Щ J1 . UJ
19 Р ,
ZfjAW
4F
2Z
о to
1 2-Гг 20
4
I i 1 22
, х , ,
Liij rJ
,з-.4;-41Л, &
лРStr 19
(
f 5 vh-
| ,
li
3 го 1
t
„ |VvA/.
г;
О
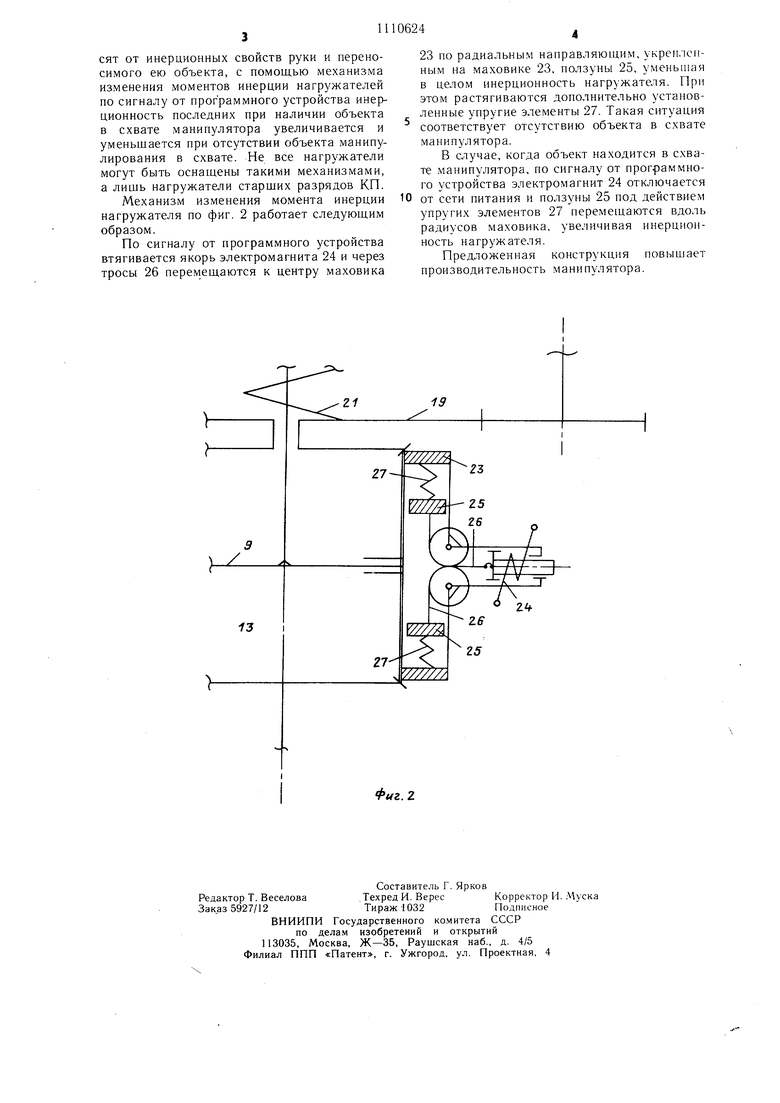
W, Изобретение относится к машиностроению, а именно к манипуляторостроению. По основному авт. св. № 738865 известен манипулятор с цикловым унравлением, содержащий смонтированные на основании HjapHHpHo соединенные звенья, приводные кинематические цени для осуществления перемещений этих звеньев, управляемые фиксаторы, устройство нрограммного управления, механические кодовые преобразователи (КП), выполненные в виде последовательно соединенных дифференциалов с кодовыми дисками, и унругие элементы, установленные между кодовыми дисками и фиксаторами 1 . Указанный манинулятор имеет недостаточное быстрохчействие. Целью изобретения является новышение быстродействия манипулятора. Цель достигается тем, что манипулятор с цикловым унравлением снабжен установленными на основании догголнитель Цз ми индивидуальными двигателями, кинематичес кн СВЯЗИпн1)1ми с кодовыми дисками, и инерционными магружателями, установленными на сателлитах дифференциалов КЦ. Кроме того, .манипулятор снабжен .механизмом из.менения .момента инерции нагружатсля, выполненным, например, в виде -;.;1ектрома -нита, установленного на маховике, I ползчнами, кинематически связанными с маховиком носредством дополнительно iведенпыX радиa.:iь11ых направляющих. Ма (j)nr. 1 )бражен.а кинематическая схема; па . 2 --- механизм изменения момента инерции нагружателя. Манип лятор с циклов1)1м уиравление.м состоит из установленных на основании 1 :; ецьев 2 и . Звено 2 связано с выходным на.юм 4 K1I посредством кинематической цени, ооразозапной передачами 5- -8, а звено 3 связано с выходным валом 9 второго КП носредством кнпе.матической цени, обра.И)1 апной |;е|)сдач;;vui 10-- 12. КП установле ) та.к/кс па осиован1 и 1 п выполнены для С-)тпь:а,мл1ого неремещения звена 3 па диф:p(p(.,;ax 13---16, а для 1оризо1 тал1 ного звепа 2на ди()фере11циа.i;; 17 н 18. Ко,Н1чсст и) дн(| ферепцналов ,U)M КП опре.челяется ицс.лом обслужи:;;( манипулятором |;(;зицпй степеням гчободы. Каждый 3 диффсренцинлов КП кодовый диск 19. Зти диски уста1; влепы с возможностью перемещения .;сж.1у р;м у. 1ируемь1мп i: -нравляом1 1МИ от j-porpa ммного устройства {не показано) упо)амп-(|)икса1Ч)рами 30. Уиоры устапавливают|.Я так. чтобы обеспепггь псре. выходио1о вала КП в соотзетстжп с же.ласмым К1)дом. hlanpn.viep, ее,in в КП верт1н ;1;п,но1о перемен.1ения yr.iiji )ота всех кодовых .U-1CKOB одинаковь, то нолн,)Г| угчхч поворота выходного вала равен iKn ii+i-ia+m-HU s. Atliil2.,...Jsyr- bi поворота кодовых дисков еоответственно дифференциалов 1,. Пружины 21, установленные между основание.м и каждым кодовым диско.м 19, подпружинивают диски в направлении вращения и являются пружинными аккумуляторами механической энергии. Усоверщенствование манипулятора с цикловым управлением связано с установкой дополнительно индивидуальных двигателей 22, кине.матически евязанных с кодовыми дисками и с введением в конструкцию инерционных нагружателей, выполненных, например, в виде маховиков 23, жестко евязанных с сателлитами дифференциалов КП. Механизм изменения мо.ментов инерции нагружателей имеет собственный нривод, связанный с устройство.м нрогра.ммного управления, вьтолненный, например, в виде электро.ма1л-1ита 24, уетановленного вдоль оси маховика 23, ползунов 25, установленных с возможностью неремещения по радиальным панравляющи.м, связанны.м жестко с маховиком, кинематических передач между якорем магнита и ползунами в виде тросов 26 и дополните.чьно установленных .между маховиком 23 и ползунами 25 упругих эле.MetrroB 27. МанипуоЧятор с цикловым управление.м работает следующим образом. При включении системы все кодовые диски 19 прижаты к упорам-фиксаторам 20. От нрограм.адного устройства поступают на уноры-фиксаторы 20 и индивидуальные двигатели 22 управляющие сигналы, в результате кодовые диеки 19 в соответствии с заданны.м КО.ДОМ растормаживаются и нереводятся в другие фиксируемые упорами-фиксаторами 20 состояния. Выходной вал 4 КП повернется на за.данный кодом угол и через передачи 5-8 переместит звено 2 манипулятора, аналогично осунхествляется поворот выходного вала 9 второго КП, который через передачи IO--I2 переместит звено 3. В результате рука манипулятора совершит движение по двум кoopди aтa.м. Так, поперемепно фиксируя и отпуская по сигналам нрогра.мм.чого устройства различные кодовые диски 19 КП и подпитывая энергией с двигателей 22 аккумуляторы энергии в виде упругих эле.ментов 21, обеспечивается набор перемещепий, который определен количеством разрядов в КП. Нагружатели в виде маховиков 23 служат д;1я дипа.мической развязки движений кодовых дисков 19 КП, что позволяет независн.мо од|1Н от другого отнускать и пере.меншть в любом направлении кодовые диски. Двигатели служат нрн наличии упругих э;1ементов 21 для восполнения потерь энергии. В связи с тем, что условия динамичеекой развязки движений кодов1 1х дисков 19 зависят от инерционных свойств руки и переносимого ею объекта, с помощью механизма изменения моментов инерции нагружателей по сигналу от программного устройства инерционность последних при наличии объекта в схвате манипулятора увеличивается и уменьшается при отсутствии объекта манипулирования в схвате. Не все нагружатели могут быть оснащены такими механизмами, а лишь нагружатели старщих разрядов КП.
Механизм изменения момента инерции нагружателя по фиг. 2 работает следующим образом.
По сигналу от программного устройства втягивается якорь электромагнита 24 и через тросы 26 перемещаются к центру маховика
23 по радиальным направляющим, укрепленным на маховике 23, ползуны 25, уменьшая в целом инерционность нагружателя. При этом растягиваются дополнительно установленные упругие элементы 27. Такая ситуация
соответствует отсутствию объекта в схвате манипулятора.
В случае, когда объект находится в схвате манипулятора, по сигналу от программного устройства электромагнит 24 отключается
от сети питания и ползуны 25 под действием упругих элементов 27 перемешаются вдоль радиусов маховика, увеличивая инерционность нагружателя.
Предложенная конструкция повышает производительность манипулятора.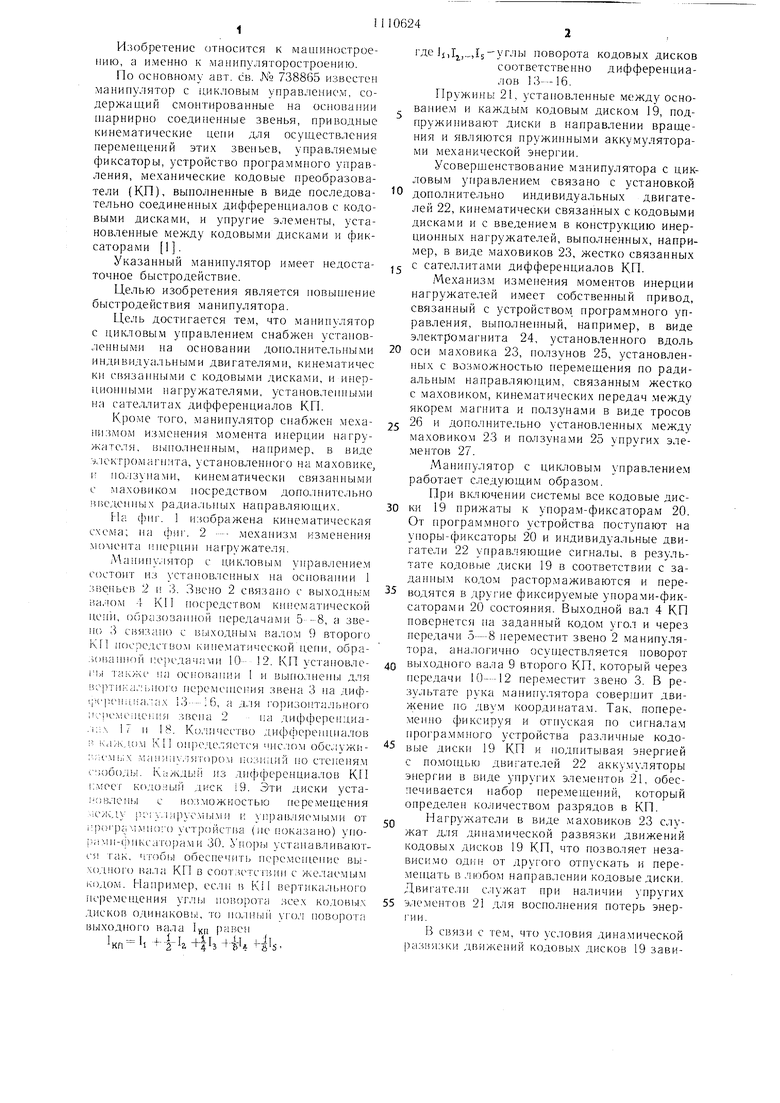
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Рекуперативный позиционер объекта-рекупер | 1988 |
|
SU1768382A1 |
| РЕГУЛЯТОР СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2106681C1 |
| Устройство для имитации модуля поворота | 1989 |
|
SU1705063A1 |
| МНОГОПОРШНЕВОЙ РЫЧАЖНЫЙ МЕХАНИЗМ | 2020 |
|
RU2751012C1 |
| Стенд для испытания ведущих мостов транспортных средств | 1987 |
|
SU1422050A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МОТОРНО-ТРАНСМИССИОННОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102715C1 |
| Механизм возвратно-поступательного движения с уравновешиванием сил инерции | 1977 |
|
SU771387A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |
1. МАНИПУЛЯТОР С ЦИКЛОВБ1М УПРАВЛЕНИЕМ но авт. св. Л 738865, отличающийся тем, что. с целью .повышения n ;icTiu,iiMKi liiii. ill uiaci/Keu yo гановлениыMii iia ()Haiiii; .лмюлиительными нндиви.4ya,U). дищ-атс/иг-Л. 1 пнематичсски свя3;iHHb; iii с кодовмлп . и ннсрцноннымн uaгpy кaтoля ;и. ус :а1ювленным11 на сате,,1ит;1Х д1и1н}н-рен1Г11алов ко;и)вых преобразоватс. нч. 2. Манипулятор о н. 1. отличающийся тем. ч iC) oii снап/кеп механизмом нзме;1ения момента liiiepHHH пагружателя. выиолнеиiHiiM i; :5ii;j.e -,1. ект|Н :.::1Ч1Ита, установлеииого иа MaxoiuiKo. li нолзуиамн. л ине 1ат ческн связ:;::1н,ми с NKIXOIMIKOM посредством донолнгте, ввсдс11чых 1адпа. нанрав.1Я1О1;и1х,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
