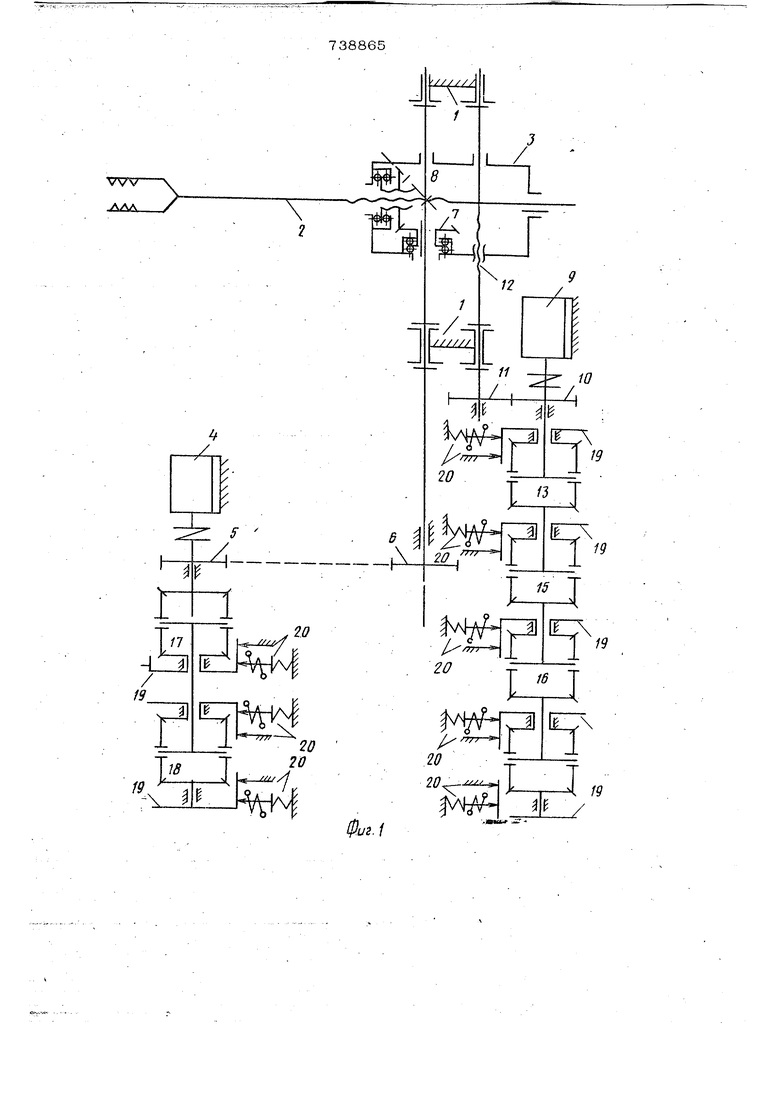
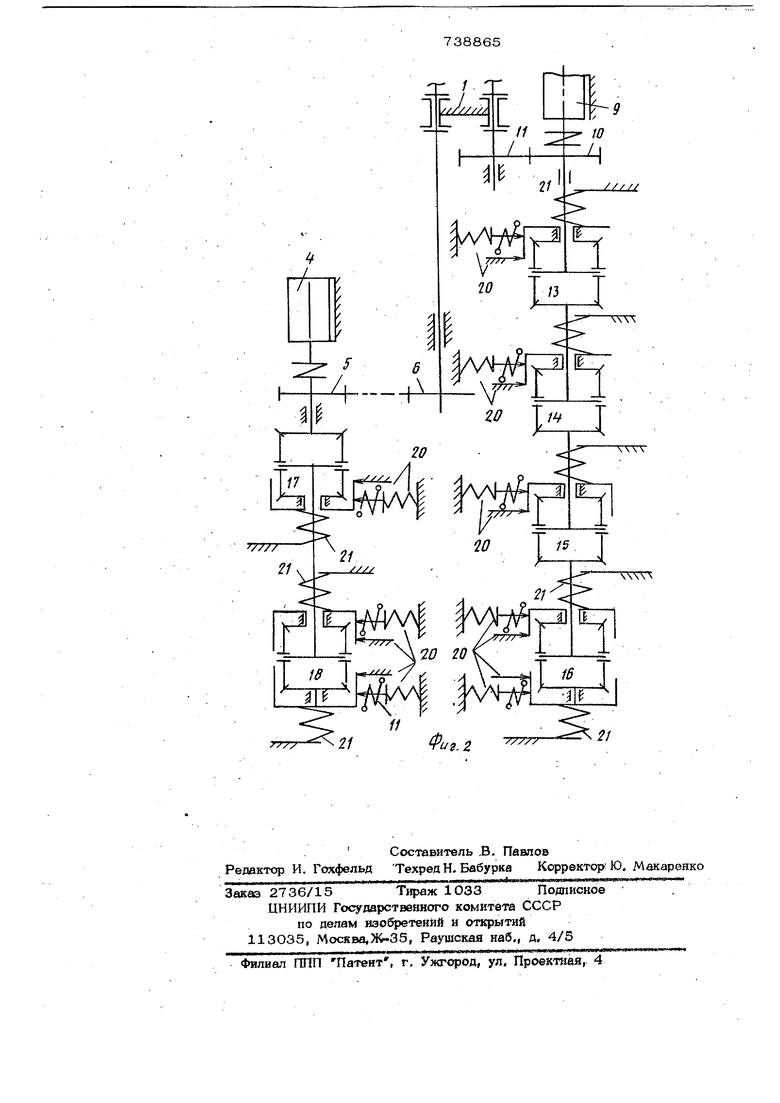
ро&-фиксаторов, причем один из входов каждого дифференциала связан с соответь стгвующим кодовым диском, сами преобрааоватёли связаны с кинематическими ц&йями 3веньев. М ежду каждым кодовьтм Шо ком и упором-фиксатором установлен упру гий элемент. Такое, выполнение манипулятора дает вёзможноеть значительно повысить его фун3;йЬнальныё возможности за счет увеличения числа обслуживаемых позиций, которое в этом случае равно 2К , здесь К - число разрядов кодового преобразовав теля, 2К - ИСЛО| упоров, п - число степеней свободы манипулятора, и упростить конструкцию. При точность вьптбше ния движений сохраняется вследствие наличия в конструкции жестких механических упоровг-фиксаторов. Введение в конструкцию упругих эле MeH Wfiae TgoSJvibMtbCtb повьгсить скороеть перемещения звеньев, уменьшить м ность установленных двигателей и повы-Сйть долговечность конструкции, расширит ее функциональные возмолшости. Эти улуч шения объясняются тем, что упругие элементы выполняют роль безынерционного привода, который пшеременно выдает и аккумулирует энергию. При этом установленные в манипуляторе двигатели исполь зуются только для восполнения потерь этой энергии, а работа упоров-фиксаторов становится менее напряженной так как излишки энергии, в основном, забираются упругими элементами. На фиг. 1 изображена кинематическая схема предлагаемого манипулятора, на фиг. 2 - схема, поясняющая подключение упругих элементов в кодовый преобразов&тель. Матотупятор сцйкловьгм уНра ёйёнием г 5 ::гсиГ из установленньгх на основании 1 звеньев 2 и 3. Звено 2 связано с двигателем 4 посредством приводной кинематической цепи, образованной передачами 5-8, а звено 3 связано с двигателем 9 посредством приводной кинематической цепи, образованной передачами 10, 11, 12. На основании 1 ус аШЬЛёШ гшеже кодовые преобразователи (КП), вьшолненные вертикального перемещениязвена 3 на дифферешщалах 13-16, а для гфизонV тального перемещения звена 2-на дафференииалах 17 и 18. КП вёртакЖЛ Шго ШрШ1ЩШ1Й Кинематически свяган с двигателем 9, а КП горййГойтапйнбГо перемещения - с двигателем 4. Количество дифференциалов в каждом КП определяется ЧИСЛОМ обслуживаемых манипуляторов позиций по степеням свободы. Каждый из дифференциалов КП имеет кодовый диск 19. Эти диски уст(ановлены между регулируемыми и упраЕйяеМйми от программного устройства (не показано) упорами-к))иксатсрами 20. yifdptr устанавливаются так, чтобы обеспечить перемещение на выходе КП в соответствии с желаемым кодом. Так, например, если в КП вертикального перемещения углы поворота всех кодовых дисков одинаковы, то полный угол поворота вала КП, связанного с двигателем 5, ра двигателем ч. . где , ,-Ре.%,Я,,. г- углы поворога кодовых дисков соответственно дифференциалов 13-16. Если какиёг-либо из кодовых дисков неподвижны (зафиксированы фиксаторами), то в приведенном соотношении опускаются соответствующие слагаемые и угол поворота КП становится меньше. Попеременно фиксируя и опуская с помощью программного устройства кодовые диски КП, можно обеспечить широкий набор перемещений на его выходе, т.е. щирокий набор положений звена 3. Аналогично организована работа КП горизонтального перемещения, обеспечивающего набор различных положений зв.ена 2. Как указывалось, дополнительное усо вёршействование манипулятора связано с включением в кодовый преобразователь упругих элементов. На фиг. 2 показанб КП вертикального и .горизонтальнЬго перещения. Пружины 21, установленные между основанием и кажгзым кодовым диском, подпружинивают эти диски в направлении вращения. РабоТйет манипулятор с цикловым управлением следующим образом. При включении системы все кодовые диски 19 прижаты к упорам 20 и зафиксированы фиксаторами. При этом подаетсяпитание на двигатели 4 и 9, которые развивают моменты, но не могут прийти в дви1кение, т.е. КП заторможены. Если от npoCRaj MHoro устройства поступят управляющие сигналы и растормозят в соответствии с заданным кодом некоторые диски КП, то система придет в движение. Двигатель 4 повернется на , данный, кодовым преобразователем угол и через пёрёШчи 5-8 переместит звено 2 Манипулятора, aнaлJoГичнo осуществит поворот двигатель 9, который через пе- редачи 1О, 11 и 12 переместит звено 3. В результате рука манипулятора совершит плоское движение по двум координатам. Попеременно .фиксируя и отпуская по сиг налам программного устройства раалЙйьШ кодовые диски,КП обеспечивают набор леремещений, который определяется кошчест вом разрядов в каждом КП. Реверс сист&мырьеспечивается реверсом двш ателеи 4 и 9. Если конструкция выполняется с noOTpj жиненными кодовыми дисками, то ее работа отличается от описанного Изше только в той части, что пружины 21 попеременно аккумулируют и выдают энергию, а д вигатели 4 и 9 используются только для восполнения потерь энергии. При этом их g бота облегчается и кроме того ; облегчу ется работа упоров йксаторов, которые в этом случае воспринимают меньшие удар ные нагрузки Последнее объясняется тем, что энергия движущихся масс рзтси запасается в прушшах. Приведенная кинематическая схем. две степени свободы. Разумеется, что описанные принципы легко обобщаются на схемы с любым числом степеней и самым различным их расположением в npociv ранстве. Формула изобретения 1. Манипулятор с цикловым управлением, содержащий смонтированные на основании шарнирно соединенные звенья, приводные кинематические цепи для осущест. вления относительных перемещений . этих звеньев, управляемые упоры-фиксаторы и устройство программного управления, о -Рличающийся тем, что, с целью расширения функциональных возможностей и упрсяцения конструкции, он снабжен механическими кодовыми преобразователями, выполненными в виде последовательно соединенных дифференциалов, и кодовыми диоками дифференциалов, установленными с возможностью вращения относительно управляемых упорОЕ -фиксаторов, причем один из входов каждого дифференциала связан с соответствующим кодовым 1диском, а сами преобразователи связаны с кинематическими цепями звеньев.. 2. Манипулятор по п. 1, отличарэ щ и и с я тем, что между каждым кодовым диском дифференциалов и упором фиксатором установлен упругий элемент. Источники информации, риня1ые во внимание при экспертизе , 1. Белянин П. Н. Промышленные роботм Японии, НИИАТ, 1977, с. 37-50, рис. 7 8. 2.B.NN-Rooks ,9-А.ТоЫаз А Sivnpte : urate positionings-sstew for Rn usifiat robot The indueiriae robot,. ecember,19i4.
///// А
J
rvij
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| Рекуперативный позиционер объекта-рекупер | 1988 |
|
SU1768382A1 |
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Манипулятор | 1974 |
|
SU570482A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
vvv ч
.АЛЛ /
у/////
- 11
L.
/
г
2
Tuf-iZiiJ/
я
Е:Л
/ 4 I г
л 19
/ /777-Н
№ГР
19
l /rrr20
I
L
w
I
J
0 . J,
f9
