фиг 1
работе в позиционном режиме движение от червяка 10 передается колесу 8, зуб которого уходит от зуба 6 диска 5 и тем самым происходит расфиксация этого диска, являющегося одним из входов дифференциала. Этот вход под действием крутящего момента упругого накопителя энергии с элементами 12, 13 и 11 приходит в движение и через
,еф j etfc-1
водило дифференциала вращает выходное звено 2 объектом 11, пл авно разгоняя его до максимальной сЪорбсти. Движение колеса б измеряется датчиком пути и продолжается до тех пор, пока не будет пройдена половина пути заданного перемещения. Затем двигатель, связанный с этим червяком, останавливается, останавливается колесо 8, а диск 5 догоняет колесо и упирается в его зуб. При этом стопорится вход дифференциала, но объект 1 продолжает двигаться по инерции и через дифференциал проворачивает диск 4, отводя его зуб от зуба колеса 7.
Происходит закручивание упругого накопителя энергии и гашение скорости объекта 1. Одновременно от двигателя начинает вращаться вторая передача и зуб ее колеса 7 догоняет зуб диска 4. При этом от двигателя происходит подкачка энергии в упругий накопитель. Движение продолжается до тех пор, пока датчик пути не зафиксирует, что объект 1 прошел весь путь заданного перемещения и достиг точки позиционирования. Аналогично происходит движение в обратном направлении с той лишь разницей, что для разгона объекта расфиксируется диск 4, а для его торможения и подкачки энергии используется первая передача и диск 5. При работе в цикловом режиме имеются зубчатые фиксирующие диски, которые удерживаются от вращения взаимодействующими с их зубьями пальцами приводных рычагов. Фланец 18 служит для подсоединения двигателя подкачки энергии. 2 з. п. ф-лы, 5 ил.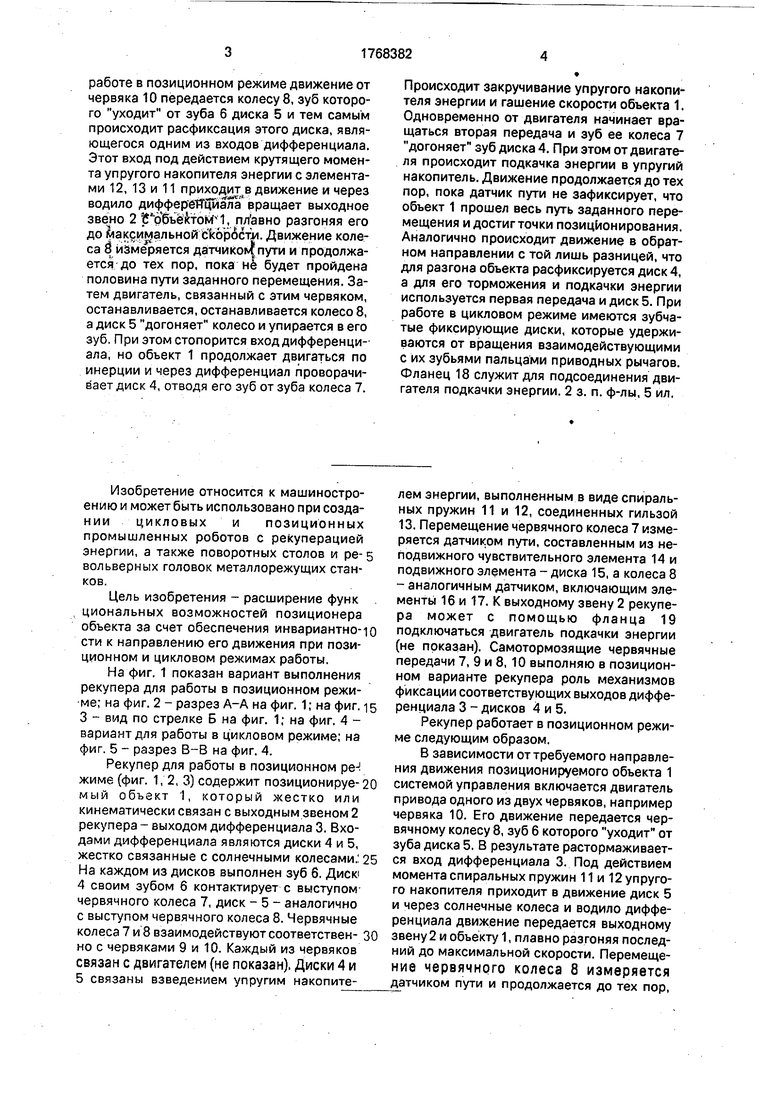
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2013217C1 |
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| ПРОТЕЗ КИСТИ | 2012 |
|
RU2506931C2 |
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
Изобретение относится к машиностроению и может быть использовано при создании цикловых и позиционных промышленных роботов с рекуперацией энергии, а также поворотных столов и револьверных головок металлорежущих станков. Цель изобретения - расширение функциональных возможностей за счет обеспечения инвариантности к направлению движения выходного звена при позиционном и цикловом режимах работы. При у Ё V4 С 00 со со ю 
Изобретение относится к машиностроению и может быть использовано при созда- нии цикловых и позиционных промышленных роботов с рекуперацией энергии, а также поворотных столов и ре- вольверных головок металлорежущих станков.
Цель изобретения - расширение функ циональных возможностей позиционера объекта за счет обеспечения инвариантности к направлению его движения при позиционном и цикловом режимах работы.
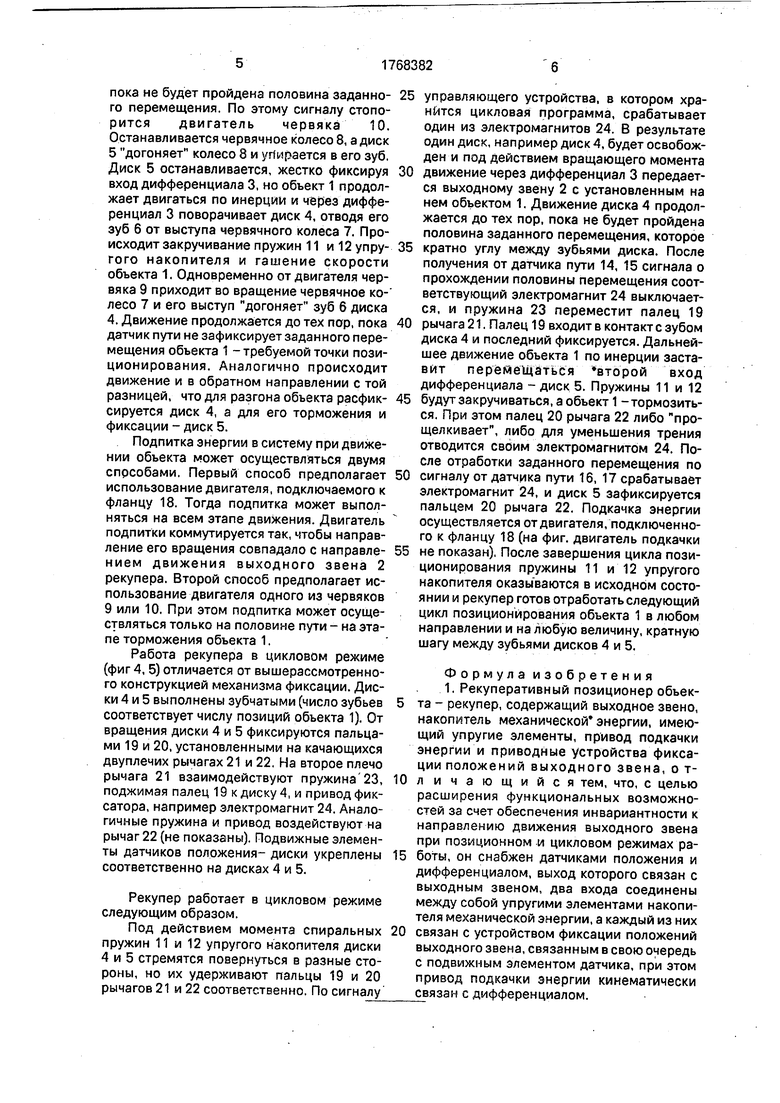
На фиг. 1 показан вариант выполнения рекупера для работы в позиционном режиме; на фиг. 2 - разрез А-А на фиг. 1; на фиг.
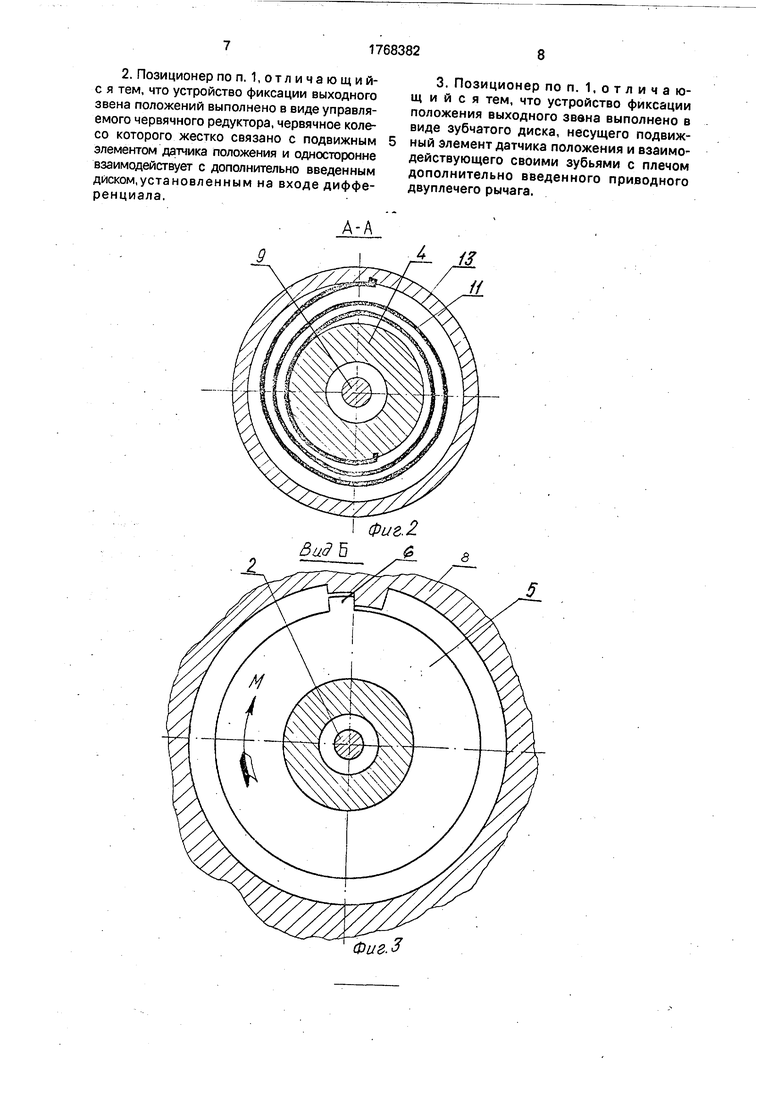
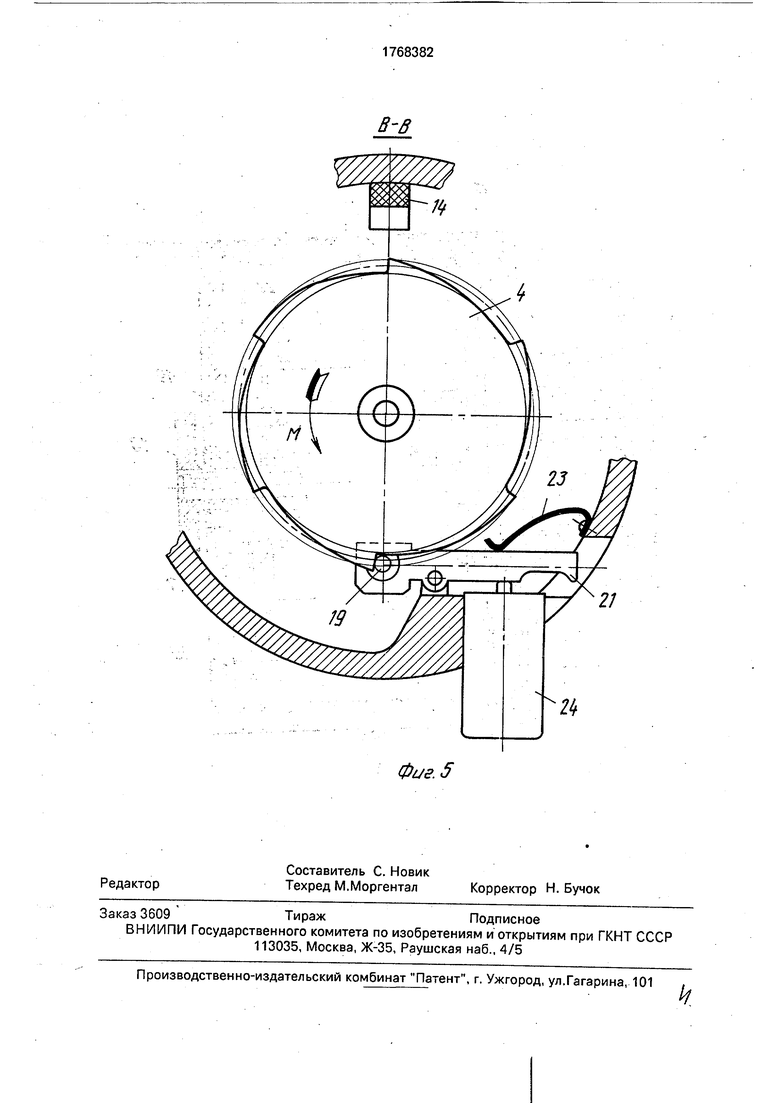
3- вид по стрелке Б на фиг. 1; на фиг. 4 - вариант для работы в цикловом режиме; на фиг. 5 - разрез В-В на фиг. 4.
Рекупер для работы в позиционном ре- жиме (фиг. 1, 2, 3) содержит позиционируемый объект 1, который жестко или кинематически связан с выходным звеном 2 рекупера - выходом дифференциала 3. Входами дифференциала являются диски 4 и 5, жестко связанные с солнечными колесами: На каждом из дисков выполнен зуб 6. Диск
4своим зубом б контактирует с выступом червячного колеса 7, диск - 5 - аналогично с выступом червячного колеса 8. Червячные колеса 7 и 8 взаимодействуют соответствен- но с червяками 9 и 10. Каждый из червяков связан с двигателем (не показан). Диски 4 и
5связаны взведением упругим накопителем энергии, выполненным в виде спиральных пружин 11 и 12, соединенных гильзой 13. Перемещение червячного колеса 7 измеряется датчиком пути, составленным из неподвижного чувствительного элемента 14 и подвижного элемента - диска 15, а колеса 8 - аналогичным датчиком, включающим элементы 16 и 17. К выходному звену 2 рекупера может с помощью фланца 19 подключаться двигатель подкачки энергии (не показан). Самотормозящие червячные передачи 7, 9 и 8, 10 выполняю в позиционном варианте рекупера роль механизмов фиксации соответствующих выходов дифференциала 3 - дисков 4 и 5.
Рекупер работает в позиционном режиме следующим образом.
В зависимости от требуемого направления движения позиционируемого объекта 1 системой управления включается двигатель привода одного из двух червяков, например червяка 10. Его движение передается червячному колесу 8, зуб 6 которого уходит от зуба диска 5. В результате растормаживается вход дифференциала 3. Под действием момента спиральных пружин 11 и 12 упругого накопителя приходит в движение диск 5 и через солнечные колеса и водило дифференциала движение передается выходному звену 2 и объекту 1, плавно разгоняя последний до максимальной скорости. Перемещение червячного колеса 8 измеряется датчиком пути и продолжается до тех пор,
пока не будет пройдена половина заданного перемещения. По этому сигналу стопорится двигатель червяка 10. Останавливается червячное колесо 8, а диск 5 догоняет колесо 8 и упирается в его зуб. Диск 5 останавливается, жестко фиксируя вход дифференциала 3, но объект 1 продолжает двигаться по инерции и через дифференциал 3 поворачивает диск 4, отводя его зуб 6 от выступа червячного колеса 7. Происходит закручивание пружин 11 и 12 упругого накопителя и гашение скорости объекта 1. Одновременно от двигателя червяка 9 приходит во вращение червячное ко- лесо 7 и его выступ догоняет зуб 6 диска 4. Движение продолжается до тех пор, пока датчик пути не зафиксирует заданного перемещения объекта 1 - требуемой точки пози- ционирования. Аналогично происходит движение и в обратном направлении с той разницей, что для разгона объекта расфик- сируется диск 4, а для его торможения и фиксации - диск 5.
Подпитка энергии в систему при движении объекта может осуществляться двумя спрсобами. Первый способ предполагает использование двигателя, подключаемого к фланцу 18. Тогда подпитка может выполняться на всем этапе движения. Двигатель подпитки коммутируется так, чтобы направление его вращения совпадало с направлением движения выходного звена 2 рекупера. Второй способ предполагает использование двигателя одного из червяков 9 или 10. При этом подпитка может осуществляться только на половине пути - на этапе торможения объекта 1.
Работа рекупера в цикловом режиме (фиг 4, 5) отличается от вышерассмотренного конструкцией механизма фиксации. Диски 4 и 5 выполнены зубчатыми (число зубьев соответствует числу позиций объекта 1). От вращения диски 4 и 5 фиксируются пальцами 19 и 20, установленными на качающихся двуплечих рычагах 21 и 22. На второе плечо рычага 21 взаимодействуют пружина 23, поджимая палец 19 к диску 4, и привод фиксатора, например электромагнит 24. Аналогичные пружина и привод воздействуют на рычаг 22 (не показаны). Подвижные элементы датчиков положения- диски укреплены соответственно на дисках 4 и 5.
Рекупер работает в цикловом режиме следующим образом.
Под действием момента спиральных пружин 11 и 12 упругого накопителя диски 4 и 5 стремятся повернуться в разные стороны, но их удерживают пальцы 19 и 20 рычагов 21 и 22 соответственно. По сигналу
управляющего устройства, в котором хранится цикловая программа, срабатывает один из электромагнитов 24. В результате один диск, например диск 4, будет освобожден и под действием вращающего момента
движение через дифференциал 3 передается выходному звену 2 с установленным на нем объектом 1. Движение диска 4 продолжается до тех пор, пока не будет пройдена половина заданного перемещения, которое
кратно углу между зубьями диска. После получения от датчика пути 14, 15 сигнала о прохождении половины перемещения соответствующий электромагнит 24 выключается, и пружина 23 переместит палец 19
рыча га 21. Палец 19 входит в контакт с зубом диска 4 и последний фиксируется. Дальнейшее движение объекта 1 по инерции заставит перемещаться второй вход дифференциала - диск 5. Пружины 11 и 12
будут закручиваться, а объект 1 -тормозиться. При этом палец 20 рычага 22 либо про- щелкивает, либо для уменьшения трения отводится своим электромагнитом 24. После отработки заданного перемещения по
сигналу от датчика пути 16, 17 срабатывает электромагнит 24, и диск 5 зафиксируется пальцем 20 рычага 22. Подкачка энергии осуществляется от двигателя, подключенного к фланцу 18 (на фиг. двигатель подкачки
не показан), После завершения цикла позиционирования пружины 11 и 12 упругого накопителя оказываются в исходном состоянии и рекупер готов отработать следующий цикл позиционирования объекта 1 в любом направлении и на любую величину, кратную шагу между зубьями дисков 4 и 5.
Формула изобретения
связан с устройством фиксации положений выходного звена, связанным в свою очередь с подвижным элементом датчика, при этом привод подкачки энергии кинематически связан с дифференциалом.
Фие.З
/
в
Фиг. 4
w
16
21
Ik
| Модуль манипулятора | 1987 |
|
SU1472250A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
