4
СО
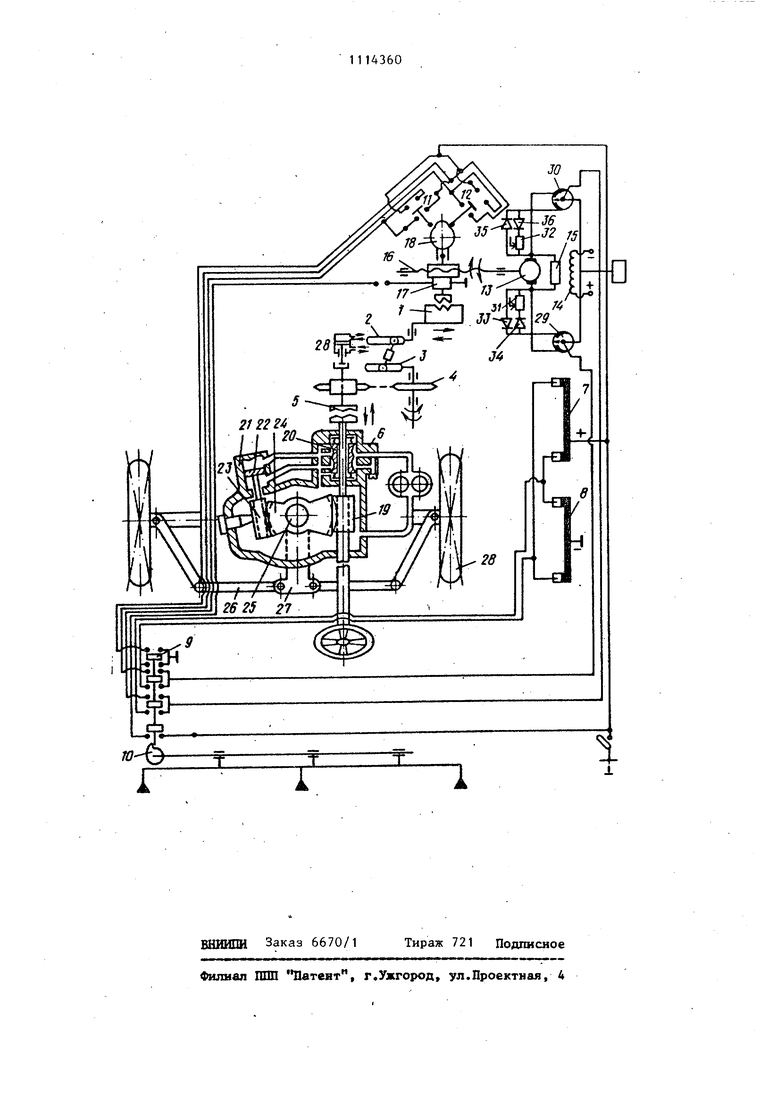
0д Изобретение относится к сельскому хозяйству, в частности к системам автоматического вождения тракторного агрегата. По основному авт.св. № 1055366 известна система автоматического вождения тракторного агрегата на склонах, содержащая маятник, который посредством рычагов, цепной передачи и муфты связан с гидроусилителем рулевого управления, ртутные датчики продольного крена, переключатель, кулачок, микропереключатели, электродвигатель с обмоткой возбуждения и реле, винтовую пару, электромагнит, кулачок, при этом гидроусилитель рулевого управления включает червяк, связанный с золотником, управляющим работой гидроцилиндра с поршнем, заканчивающимся рейкой, взаимодействующей с сектором, за1 репленным на валу, который жестко связан с сошкой рулевой трапеции и колес ами lj Известное устройство характеризуется недостаточно точным поддержакием заданной траектории движения тракторного агрегата относительно первоначальной горизонтали, Целью изобретения является повьш1е ние точности движения тракторного агрегата относительно первоначальной горизонтали. Поставленная цель достигается тем что в системе автоматического вождения тракторного агрегата на склонах, цепь якоря электродвигателя содержит два контактных переключателя с двумя подвижными контактами, два потенциометра и четыре диода, при этом один подвижный контакт каждого контактного переключателя соединен с цепью электродвигателя, а другой - с встречно включенными диодами, один и которых последовательно соединен с потенциометром, а все подвижные кон такты контактных переключателей кине матически связаны с маятником, . На чертеже представлена кинематическая схема системы автоматического вождения тракторного агрегата на .склонах. Система автоматического вождения включает маятник 1, который посредством рычагов 2 и 3, цепной передачи 4 и муфты 5 связан с гидроусилителем 6 рулевого управления, ртутные датчики 7 и 8 продольного крена, переключатель 9, кулачок 10, микропереключатели 11 и 12, электродвигатель 13 с обмоткой 14 возбуждения и реле 15, винтовую пару 16, электромагнит 17, кулачок 18, при этом гидроусилитель 6 рулевого управления содержит червяк 19, связанный с золотником 20, управляющим работой гидроцилиндра 21 с поршнем 22, заканчивающимся рейкой 23, взаимодействующей с сектором 24, закрепленным на валу 25, который жестко связан с сошкой 26 рулевой трапеции 27 и колесами 28, а цепь якоря электродвигателя соДержит два контактных переключателя 29 и 30 с двумя подвижными контактами, два потенциометра 31 и 32 и четыре диода 33-36, при этом Ьдин подвижный контакт каждого контактного переключателя соединен с цепью электродвигателя 13, а другой - с встречно включенными диодами, один из которых последовательно соединен с потенциометром, а все подвижные контактны контактных переключателей 29 и 30 кинематически связаны с маятником 1, Система работает следующим образом. При движении тракторного агрегата поперек склона маятник 1 отклоняется в сторону спуска на угол, равный углу склона. Сигнал от маятника 1 через рычаги 2 и 3, цепную передачу 4 и муфту 5 передается на червяк 19, При повороте червяка 19 появляется осевое усилие, сдвигающее золотник 20, обеспечивая подачу масла в одну из полостей гидроцилиндра 21, Поршень 22, перемещаясь вместе с рейкой 23, воздействует на сектор 24 и через вал 25, сошку 26 и рулевую трапецию 27 воздействует на колеса 28, поворачивая их в сторону подъема. Одновременно ввиду кинематической связи маятника 1 с подвижными контактами контактных переключателей 29 и 30 происходит их замыкание с соответствующей парой неподвижных контактов и они остаются в таком положении по всей длине гона независимо от того, поступает ли сигнал от ртутных датчиков продольного крена 7 и 8 или нет, В случае отклонения тракторного агрегата вверх от горизонтали образуется продольный крен, ртуть в ртутных датчиках 7 и 8 продольного крена, перемещается и замыкает соответствующие контакты. Сигнал через переключатель 9, контактный переключатель 29, потенциометр 31 поступает в электродвигатель 13 и репе 15. Потенциометр 31., введенный в цепь якоря электродвигателя 13, позволяет регулировать величину тока. Одновременно включается электромагнит 17, который соединяет ротор электродвигателя 13 через чинтовую пару 16 с маятником 1. Смещение маятника происходит с заданной скоростью в зависимости от угла склона. Как только это произойдет, контакты ртутных датчиков продольного крена 7 и 8 размыкаются с ртутью, сигнал исчезает и тракторный агрегат движется в поперечном направлении, вдоль исходной горизонтали, под воздействием маятника 1, который создает силу, достаточную для удержания колес в сторону подъема на угол, равный углу увода.
В случае отклонения тракторного агрегата вниз от исходной горизонта.ли, сигнал от ртутных датчиков 7 и 8
продольного крена через переключатель
9,контактный переключатель 30, минуя потенциометр 32, поступает в электродвигатель 13 и репе 15. Одновременно включается электромагнит 17, который соединяет электродвигатель 13 че рез винтовую пару 16 с маятником 1. Смещение маятника 1 вызывает поворот колес 28 вверх в сторону ликвидации ошибки и возвращение тракторного агрегата на исходную горизонталь.
При ndBopoTe в конце гона кулачок
10,поворачиваясь, нажимает на контакты переключателя 9. При этом отключается рабочая цепь и включается цепь возврата электромагнита 17 в середину винтовой пары 16. Как только это произойдет, цепь возврата обесточивается.
Таким образом обеспечивается повышение точности движения тракторного агрегата относительно первоначальной горизонтали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического вождения тракторного агрегата на склонах | 1982 |
|
SU1055366A1 |
| Система автоматического вождения тракторного агрегата на склонах | 1985 |
|
SU1391519A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАКТОРОМ НА СКЛОНОВЫХ ЗЕМЛЯХ | 1999 |
|
RU2163748C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Устройство для автоматического вождения тракторного агрегата на виноградниках | 1980 |
|
SU923396A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Система автоматического вождения сельскохозяйственных агрегатов | 1987 |
|
SU1443831A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО ВОНЩЕНИЯ ТРАКТОРНОГО АГРЕГАТА НА СКЛОНАХ по авт.св. № 1055366, отличающаяся тем, что, с цет лью повышения точности движения тракторного агрегата относительно перво-. начальной горизонтали, цепь якоря электродвигателя содержит два контактных переключателя с двумя подвижными контактами, два потенциометра и четыре диода, при этом один подвижный контакт каждого контактного переключателя соединен с цепью электродвигателя, а другой - с встречно включенными диодами, один из которых последовательно соедннен с потен1у1ометром, а все подвижные контакты контактных переключателей кинематически связаны с маятником.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического вождения тракторного агрегата на склонах | 1982 |
|
SU1055366A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
