(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПОВОРОТА ТРАКТОРНОГО АГРЕГАТА
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к автоматизации вождения машинно-тракторных агрегатов на поворотной полосе.
Известно устройство для автоматизации поворота тракторного агрегата, содержащее электрогидравлические усилители механизма управления, программное устройство в виде профилированного диска с электроконтактным узлом слежения за формой образующей и путеизмерительного колеса с редуктором и гибким валом 1.
Однако данное устройство не может обеспечить реализацию оптимальных по затратам времени кинематических режимоц и параметров траекторий рациональных видов поворотов мащинных агрегатов, а также не содержит узлов, позволяющих состыковать данное устройство с другим, обеспеч11вающим автоматическое направление движения агрегата на рабочем гоне или ручное управление им при переезде на другое поле.
Недостатки обусловлены тем, что оптимальные по затратам времеЯи и ширине поворотной полосы кинематические режимы движения и параметры траекторий рациональных видов поворотов для каждого конкретного случая имеют единственное значение, и реализовать заданную ширину поворота можно только в относите.льно узком ин, тервале соответствующих скоростей движения агрегата по траектории. Заданнь1м щири
не поворота, скорости движения по траектории, составу машинно-тракторного агрегата по условиям оптимальности соответствуют единственные значения угловой скорости поворота направляюидих колес трактора
10 (интенсивности управляющего воздействия) и предельного угла поворота направляющих колес. В Э.ТОМ устройстве имеется электроконтактный узел слежения за. формой образующей профилированного диска, который по программе может только включать и от5 ключать электрогидравлические усилители механизмов поворота трактора, а регулирование скорости поворота направляющих колес (интенсивности управляющего воздействия) выполнить не может.
20 Данное устройство представляет собой реализацию следящей системы, поэтому возможно движение машино-тракторного агрегата по траектории с ограниченным углом поворота направляющих колес, но в этом случае обязательно наличие автоколебаний.
зависящих по амплитуде от зоны нечувствительности электроконтактного узла слежения за формой образующей профилированного диска и от быстроденствия электрогидравлических усилителей. Автоколебания неминуемо приводят к увеличению, длины траектории времени движения агрегата.
Кроме того, автоматическое вождение на поворотной полосе осуществляется по программе без непосредственной связи с местностью, т. е. без обратной связи. Под влиянием внешних возмущающих воздействий, таких как неоднородность рельефа и механических свойств агрофона,.а также от воздействия инерционных масс, технического состояния трактора и др. фактические траектории отличаются от расчетных, а разброс их параметров носит случайный характер. Отклонения факт11чески.х т)аектор|;: | :.а1птельно превышают а1фот(,х:к;;г .y)nvi ки на точность входа агрегата в uoniiiii оабо чий гон, При наличии водите.1Я на ракто ре целесооб)аз1Ю основную пасть траектории выполнять в режиме автоматическ01о управления. В мо.мент. когда даже неточные действия водителя уже не могут привести к значительному увеличению времени гюворота. а оставн егося пути eute достаточно /итя исправления возможных ошибок вождения, нужно передать управление водпт мя системе автоматическо Ч) направления .ч.вижения на рабочем гоне. Поэтому существенным недостатком известного устройства является также отсутствие узла, позволяющего быстро, на ходу без остановки трактора или снижения скорости движения npoiTrtiec ти переключение режимов функционирования и в нужный момент передать управлепие водителю.
Электроконта1:стный узел копирования образуюп ей профилированного диска в известном .устройстве неносредственно управлят включением электромагнитов элсктрогидравлических усилителей .механизма поворота трактора и приводит к образованию дуги между контактами, выносу металла и к быстрому выходу их из строя.
Известно устройство для автоматического поворота тракторного агрегата, содержащее программный блок в виде профилированного диска с шаговым двигателем, импульсный датчик, скорости на валу заднего .моста трактора и электрогидравлические усилители 2.
Однако из-за отсутствия блока регулировки (задатчика) интенсивности управляющего воздействия на направляющие колеса блока ограничения предельных углов поворота направляющих колес, блока переключения режимов функционирования (переключателя), не реализуются оптимальные по затратам времени кинематические режимы движения и параметры траекторий рациональных видов поворотов. .Наличие силового электрического контакта в цепи управления электрогидравлическими усилителями снижает надежность устройства.
Целью изобретения является автоматическая оптимизация времени на поворот тракторного агрегата.
Поставленная .цель достигается тем, что устройство снабжено преобразователем, переключателем режимов функционирования, задатчиком управляющего воздействия, формирователем управляющего сигнала, датчиком обратной связи, ограничителем углов поворота направляющих колес, формирователем управляющего сигнала и задатчиком интенсивности управляющего воздействия, причем преобразователь механически связан с программным устройством, электрически -
5 -с переключателем режимов функционирования и задатчиком интенсивности управляюiiu го 1.(:;:,;|.- йс ;;ия, который механически свяiai; с i JUMM-iM о..ч трактора, переключаге;:ь реж.и:уи.)в («упкционирования электрически свя;;ап с (jj-ормирователем управляю meio сигнала, который связан с датчиком обратной связи, а через ограничитель углов поворота направляющих колес, связанный механически с гидр()усилителем. и электронный усилитель -- с электрогидравлическимм
5 усилителями, которые глеханически связаны с задатчиком интенсивности унравляющего воздействия и идроусилителем, при этом датчик обратной связи механически связан с ги..1роусилит(.;лем, а задатчик интенсивности управляю1це1о воздействия электрически свя0 с электронным усилителем.
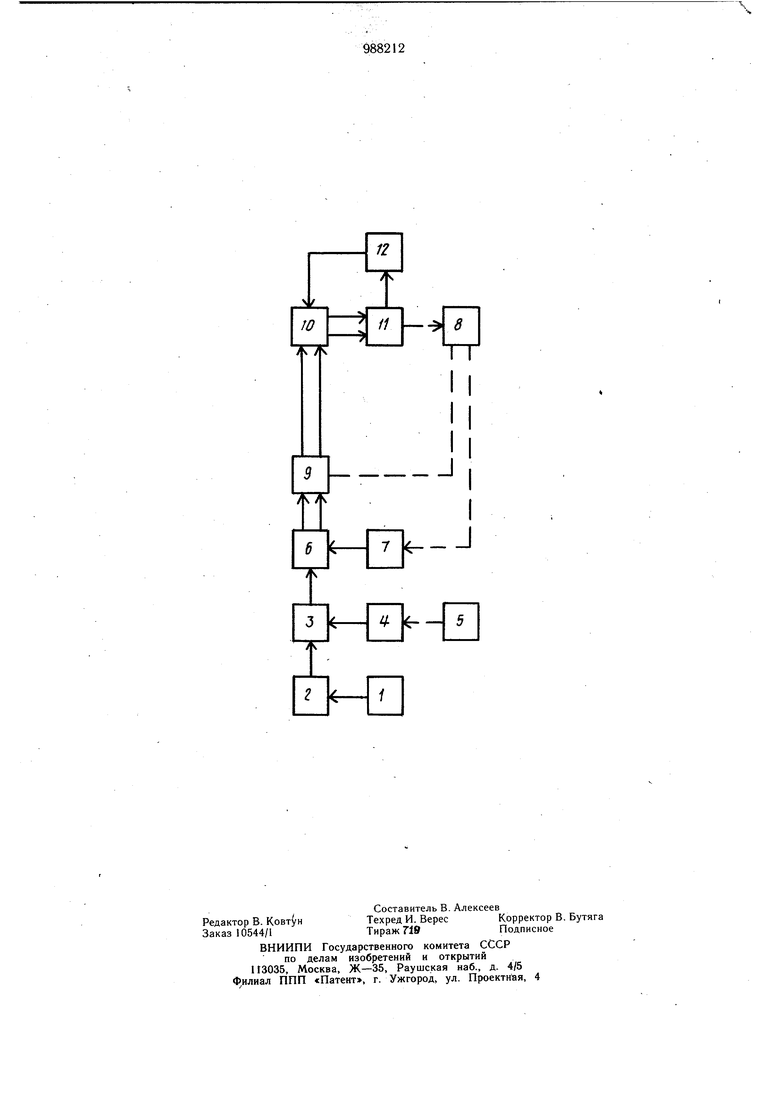
На чертеже нзображот блок-схема устройства.
Устройство содержит программное устройство 1 п виде профилированного диска с inaroBbiM .авигате.лем, электронны.м бло5 ком управления работой щагового двигателя и импульсным датчиком скорости, преобразователь 2 угловых неремещений в пропорциональное углу напряжение, выполненный в виде потопцио.мстра или вращающегося
„ трансформатора, механически связанного с программным устройством 1, переключате.чь режимов функционирования 3| выполненный в виде электронной схемы с сигнальны.ми лампами для индикации включенного режима, тумблером для переключения направ5 ления первого поворота, звуковым генератором для извещения водителя об окончании программы поворота и передаче управления ему, с К1{011ками для переключения режимов включения питания, с штепсельным разъемом д..Я соединения с устройством автоматического управления на раоочем гоне, со
схемой датчика положения .рабочей мащины. задатчнк управляющего воздействия 4 для режима ручного управления, выполненный в виде иотенцио.метра или вращающегося трансформатора, механически связанно-го с рулевым колесом 5 трактора и преобразующего угловые перемещения рулевого колеса 5 в пропорциона; ьное углу напряжение, которое через переключатель режимов функионирования 3 передается формирователю . правляющего сигнала 6, содержащему электонную схему сравнения напряжений, потупающих от датчика обратной связи 7, ыполненного в виде потенциометра или вращающегося трансформатора, и задатчика правляющего воздействия 4 или преобраователя 2 через переключатель режимов функционирования 3.. Датчик обратной свяи 7 имеет механическую связь с гидроусиителем 8,. также как и ограничитель углов поворота направляющих колес 9, выполненный в виде двух профилированных дисков на общей оси, которые входят в рабочую щель бесконтактных выключателей типа БК и подключенный двумя электрическими вхо- . ами (для раздельного прохождения сигналов на поворот вправо и влево) к формирователю управляющего сигнала 6, а двумя электрическими выходами к электронному усилителю 10. Через электронный усилитель 10 управляющие сигналы проходят к электрогидравлическим усилителям 11, выполненным в виде электромагнитов и золотникового распределителя. G электрогидравлическими усилителями 11- механически связан задатчик интенсивносги управляющего воздействия 12, выполненный в виде транзисторной схемы, которая формирует прямоуголь-, ные импульсы с амплитудой, соответствующей напряжению бортовой сети, и регулируемой длительностью и направляет их на управляемый вход электронного усилите- ля 10. Транзисторная схема задатчика интенсивности управляющего воздействия 12 имеет потенциометрический регулятор частоты импульсов и бесконтактный датчик оборотной связи (например, вращающийсятр сформатор, механически связанный с выходным звеном электрогидравлического усилителя 11).
Устройство работает следующим образом. .
Рассчитывается программа агрегата на поворотной полосе: форма образующей профилированного диска программноо устройства 1, скорость движения и передача, интенсивность управляющего воздействия, предельный угол поворота направляющих колес трактора, время движения в режиме автоматического управления. Изготавливается и устанавливается профилированный Диск, регулируются поворотом на оси профилированные диски ограничителя углов поворота направляющих колес9 на предельный расчетный угол, установкой движка потенциометра на соответствующее деление щкалы регулируется задатчик интенсивности управляющего воздействия 12, переключатель режимов функционирования 3 настраивается на расчетное время движения в режиме автоматического управления и на направление первого поворота.
Поле очищается от крупных предметов вешками через 6-10 м или сплошной борозой отбиваются на обоих концах поля контрольные линии поворотной полосы - границы рабочего гона.
Трактор выезжает в поле, выполняет первый рабочий, проход и в момент, когда задние колеса пересекут контрольную линию
5 поворотной полось, водитель переводит рычаг управления гидросистемой в положение подъема рабочих органов. Как только рабочие органы сельскохозяйственной машины выглубятся из почвы, от схемы датчика положения машины переключателя режимов
® функционирования 3 поступ ит сигнал, устройство автоматически переключается в режим автоматического управления движением на поворотной полосе, от импульсного датчика скорости начинают поступать на
5 вход электронного блока управления шаговым двигателем импульсы, блок выдает управляющие сигналы шаговому двигателю, последний начинает вращать программный диск, кулачок узла слежения за формой образующей начинаф копировать ее профиль
0 и одновременно вращать ротор преобразователя 2. С выхода преобразователя 2 напряжение через переключатель режимов функционирования 3 поступает на вход формирователя управляющего сигнала 6, который в соответствии с направлением поворота ротора преобразователя 2 формирует релейнь1й управляющий сигнал и выдает его на один из выходов. Сигнал через ограничитель углов поворота направляющих колес 9 поступает на вход электронного усилителя 10.
Q В соответствии с длительностью управляю: щих импульсов, поступающих от задатчика интенсивности управляющего воздействия 12, открывается и закрывается электронный усилитель 10, на его выходе появляется в виде импульсов заданной длительности управляю5 щий сигнал и поступает на один из электромагнитов электрогидравлического усилите- . ля 11. Включение электромагнита с заданной частотой позволяет получить движение поршня гидроцилиндра и поворот направляющих колес не с максимальной скоростью,
обусловленной производительностью масляного насоса гидросистемы трактора, а с меньшей, зависящей от частоты включений электромагнита. Происходит движение агрегата по траектории поворота. Одновременно с поj воротом направляющих колес вращается ротор датчика обратной связи задатчика интенсивности управляющего воздействия 12. Если скорость меньше или больще заданной потенциометром, то происходит автоматическая корректировка частоты включений
0 электромагнита. Как только направляющие колеса достигнут расчетного предельного угла поворота, ограничитель углов поворота направляющих колес 9 отключит соответствующий управляющий сигнал и поворот колес прекратится. По истечении расчетного времени движения в режиме автоматического . управления переключатель режимов функционирования автоматически переключает устройство в режим ручного управления и
извещает об этом водителя подачей звукового сигнала в течение 2-3 с.
В момент отключения режима автоматического управления переключателем режимов функционирования 3 от формирователя управляющих сигналов 6 отключается преобразователь 2 и подключается задатчик управляющего воздействия 4. Услыщав звуковой сигнал, водитель, путем воздействия на рулевое колесо 5, поворачивает ротор задатчика управляющего воздействия 4 в нужную сторону. Если положение рулевого колеса 5 не соответствует углу поворота направляющих колес, то напряжения, подаваемые на входы формирователя управляющих сигналов 6 от задатчика управляющего воздействия 4 и датчика обратной связи 7 неравны, формируется управляющий сигнал, который проходит через блоки 9, 10, 11 и 8 в соответствии с вышеописанным, порядком работы, и происходит поворот направляющих колеедо тех пор, пока напряжения на входе формирователя управляющих сигналов не сравняются.
Управляя таким образом трактором, водитель точно вводит агрегат в новый рабочий гон, заглубляет рабочие органы машины и продолжает выполнение сельскохозяйствен ной операции. В момент, когда задние колеса опять пересекут контрольную линию поворотной полосы водитель переводит рычаг управления гидросистемой в положение 11(;дьема рабочих органов. Одновременно с моментом выглубления рабочих органов включается режим автоматического напрагллепия движения на 1оворотной пологе, но поворот происходит в противоположную сторону (челночный способ движения), и процесс повторяется.
Использование изобретения позволяет за счет реализации оптимальных по затратамвремени кинематических режимов движения и параметров траекторий уменьшить время каждого поворота на 38-44%, увеличить сменную производительность агрегата в зависимости от длины рабочего гона на 8- 12«/о.
Формула изобретения Устройство для автоматизированного поворота тракторного агрегата, включающее
программное устройство, импульсный датчик скорости и электрогидравлические усилители, отличающееся тем, что, с целью автоматической оптимизации времени на поворот тракторного агрегата, оно снабжено преобразователем, переключателем режимов
функционирования, задатчиком управляющего воздействия, формирователем управляющего сигнала, датчиком обратной связи, ограничителем углов поворота направляющих колес, формирователем управляющего
сигнала и задатчиком интенсивности управляющего воздействия, причем преобразова: тель механически связан с программным устройством, электрически - с переключателем режимов фуикци/онировапия и задатчиком HiiTCHciinHocTH унравляюще1о воздей0 ствии. который механически связа11 с рулевым колесом трактора, переключатель режимов функционирования электрически связан f (|;опл:11рователем упрявляюпюго сигнала, который связан с датчиком обра1 1ой связи, а через ог);и1ичитель углов пспюрота направляющих Ko:iec, связанный меха.нически с гидроусилителем, и элоктроп;11 Й усилитель - с электрогидравличесхими усилителями, которые механи1-:ески св/гзьны с задат шком интенсивности управляющего воздействия и гидроусилителем, при этом датчик обратной
0 связи механически связан с гидроусилите.leM, а задатчик ингсьхивиости упразляюще14) воздействия электрически связан с электронным ус1-.лителем.
Источники и ii фор мани и, |ринят1,:с во внимание npt- экспертизе
1.ABTOpCKCjc свидет(1ьство СССР 439260, кл. А 01 3 69/04, 1972.
2.Авторское свидетельство СССР
,N(b 593(180, кл. . 01 В G9/04, 1976 (прототип). 



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |