1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического управления движением мобильных сельскохозяйственных колесных машинно-тракторных агрегатов при выполнении механизированных работ, и может быть применено для автоматизации поворотов тракторов с передними управляемыми колесами в агрегате с прицепными и навесными сельскохозяйственными машинами. Кроме того, оно может быть использовано в комплексно автоматизированном машинном агрегате, в частности, в системе автоматического управления движением, как одна из.основных составляЮШ.ИХ частей.
Известно устройство для автоматического поворота тракторного агрегата, включаюш,ее электрогидравлические исполнительные механизмы для привода в движение органов управления гусеничного трактора, программное устройство, содержашее профилированный диск с редукторо.м и путеизмерительным колесом. Про(| илированный диск связан системой тяге контактным устройством электрогидравлических усилителей
механизма поворота и через гибкий вал с путеизмерительны.м колесом 1.
Известное устройство нельзя использовать для автоматизации вождения колесного трактора в агрегате с навесными и прицепными орудия.ми. В нем для изменения программы необходима замена профилированного диска и приводного редуктора. Эти недостатки обусловлены тем, что программный диск расположен в точке шарнирного
сочленения гусеничного трактора с прицепной или полунавесной машиной, а угол рассогласования между продольными осями трактора и .машины служит обратной связью в системе автоматического вождения. Электрогидравлические исполнительные механизмы с поступательным движением выходных звеньев пригодны для привода в движение органов управления только гусеничного трактора.
Известно также устройство для автоматического вождения тракторных агрегатов на поворотной полосе, включаюа,ее исполнительный .механиз.м, усилитель .мощности и програ.ммный блок, выполненньгй в виде профилированного диска с узлом слежения
за формой образующей, приводящегося в движение посредством шагового двигателя с импульсным датчиком скорости 2 .
Недостатком известного ус-г-ройствг является невозможность его использования для автоматизации вождения трактора в агрегате с навесной мащиной, а также на сельскохозяйственных работах, где для обеспечения выполнения технологических требований обязательно использование независимого вала отбора мощности трактора. Кроме того, для изменения программы необходима замена профилированного диска,, что снижает его эксплуатационные возможности.
Цель изобретения - расширение эксплуатационных возможностей устройстве.
Эта цель достигается тем, что устройство снабжено регулятором интенсивности управляющего воздействия, соединенным с входом питания усилителя мош.ности, и огра 1ичителем углов поворота направляющих колес, соединенным с выходом усилителя мощности и исполнительным механизмом, а программный блок выполнен в виде .моста сопротивлений, в одно плечо которого включен магази-П потенциометров с щаговым искателем и переключатель элементов программы, в другое -- гирос;{оп};ческий датчик обратной связи и интегрируюидее звено, г в диагональ моста включс фоомк с эатель управляьщего сигнала. соеди;-;енный с входом усилителя мощности, причем формирователь управляющегс сигнала ;клсйт связь с переключателем э / ементоз по гояь:м ы.
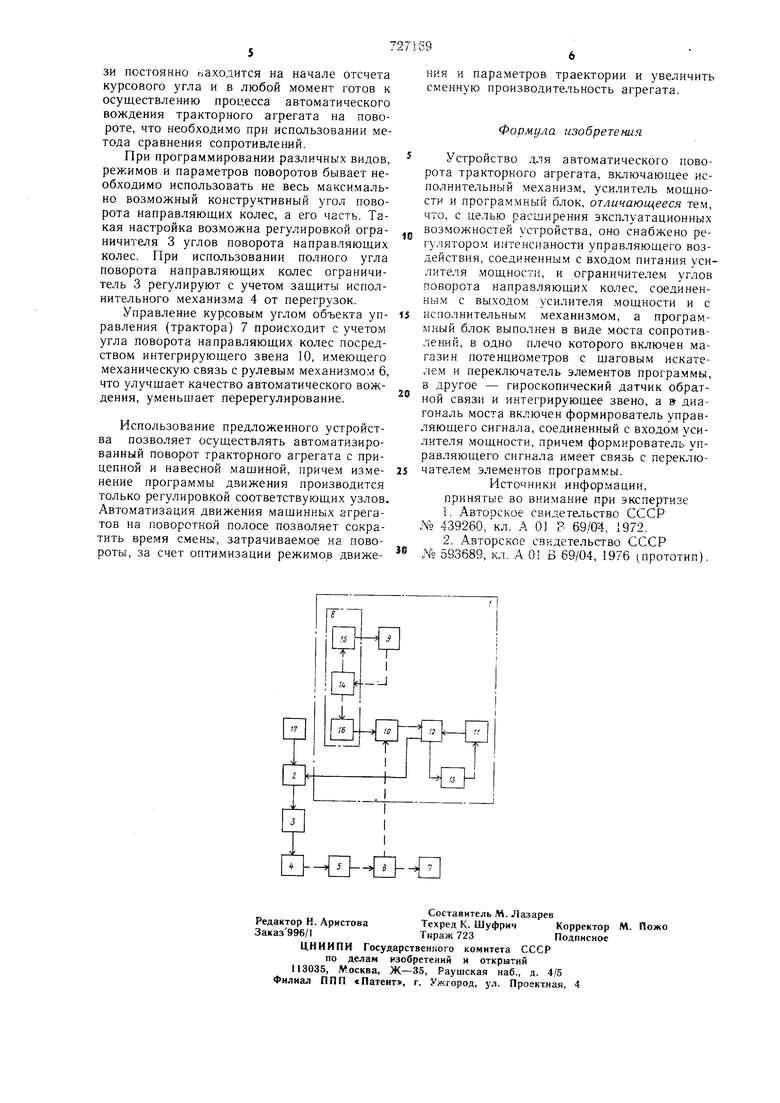
На чертеже представлена бло -с;;ема у-тройства.
Устройство содержит программный блок 1, выход которого соединен с усиляте чем мощности 2, св.язанным через регулируемый ограничитель 3 углов поворота направляющих колес с исполнительным механизмом 4. Последний связан с гидроусилителем 5, который воздействует на рулевой механизм 6 объекта управления 7 (трактор). Программный блок 1 выполнен в виде мосТа сопротивлений, в одном плече которого В1слючен гироскопический датчик 8 курсового угла со. схемой ориентации 9 и интегрирующим звеном 10. В другое плечо моста в;ключен магазин потенциометров 11 с шаговым искателем, а в диагональ данного моста включен формирователь 12 управляющего сигнала, выход которого соединен с входом усилителя мощности 2. Формирователь 12 и магазин 11 соединены с переключателем 13 элементов программы.
Гироскопический датчик 8 содержит гироагрегат 14 с датчиком положения 15 гироагрегата и потенциометром 16 гироскопического датчика на валу внешней рамки гироагрегата. Схема ориентации 9 электрически соединена с датчиком 15 положения
гироагрегата и .механически с гироагрегатом 14. Устройство снабжено pei-улятором 17 интенсивности управляющего воздействия, соединенным с входом питания усилителя 2.
Устройство для автоматического поворота тракторного агрегата работает следуюШ.ИМ образом.
Программа авто.матического управления поворотом тракторного агоегата заложена в устройство регулировкой сопротивления магазина потенциометров 1. В плечо моста сопротивлений включен первый потенциометр магазина. При включении устройства мост разбалансируется, в диагона.ли проходит ток, формирователь 12 управляюш.егс сигнала кз аналогового форллирует дискретный управляющий сигнал, который поступает ;-;а усилителя мощности 2. Усилитгль могдиости 2 подает нагфяжен.че питаоия, заданное по величине регулятором 17 интенсивности управляющего зоздействия, через регулируе. ограничите.ть 3 углов поворота направ.чяюплкх колес исгО. нительному механизму 4, Исполн)тельный механизм вращает червяк гидроусилителя 5, который асздействует нй рулевой механизм 6, что приводит к понороту направляющих колес трактора 7. Одновренеано с поворотом паправляюи,их колес проис :;;дит поворот продольной оси трактора 7. li:jH iiOBoроте рулевого .ехапизмй 6 нйпр алкющих колес и про.и,олоной тректора / прочс.холЩТ изменение сопрот;::злений norfvj-iunoMe:ра 18 гироско1;мчаско)о ./.атчн.а У нптеp;-ipyi:OLEieixi soeiia 10. Кх cvii:i : jDe сопротивление иссте и:ь: 0 приб.лйл;ае-с | к coiipoтивленню иерзого потенциоглетрй ;,:ггязинг 1 i. Как только они станут равны, мост уравновесится. управляюш,ий сигнал на выходе формирователя 12, напряжение кг: выходе усилителя мощности 2 и на входе испи.-,нмВ этот момент перек льочатель 13 элементов программы по.лает управляющий импульс па вход щагсзого искг-.ть.пя магазина потенциометров П, и схему моста включится второй потенцио.метр, и п :-оцесс автоматического управления повторится до завершения программы.
При отключении устройства гироскопический датчик 8 функционирует в режиме автоматической ориентации на местности относительно движения на рабочем гоне. Процесс ориентации гироагрегата осуществляется посредством схемы ориентации 9, содержащей мост сопротивлений, одним плечом которого является датчик положения 15 гироагрегата 14, ф10рмиров8те 1ь сигнала корректировки и исполнительный мехапизм схемы ориентации, который непосредственно воздействует на гироагрегат при компенсации увода. Благодаря непрерывной ориентации гироагрегата 11 потенциометр 16 гироскопического датчика обратной свя
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для автоматизации поворота тракторного агрегата | 1972 |
|
SU439260A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
