/ /
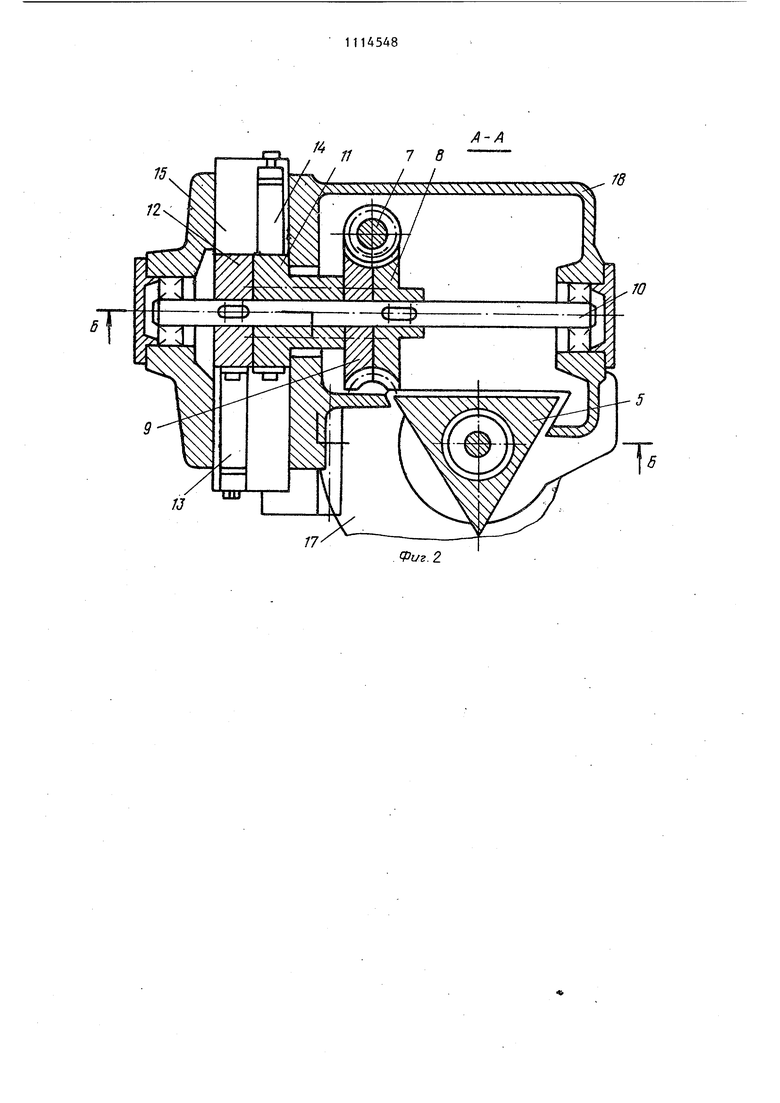
Сриг.1 ; 1 Изобретение относится к машиностроению, в частности к механизмам точного позиционирования подвижных звеньев роботов, манипуляторов и других устройств. По основному авт. св. № 973349 известен механизм позиционирования исполнительного органа, который снабжен роликами и стальными лентами, закрепленными одним концом на барабане, а другим концом связанными с подвижным звеном, при этом подвижное звено выполнено в виде треугольной призматической конструк ции и связано с роликами и барабанами. Механизм обеспечивает перемещение исполнительного органа только по прямой линии, что не всегда обес печивает требования технологическог процесса. Целью изобретения является расширение технологических возможностей, а именно получение возможности перемещения исполнительного органа по сп рали. Цель достигается тем, что механиз позиционирования исполнительного органа снабжен дополнительной червячной передачей, червяк которой при помощи муфты связан с основным валом-червяком, ползуном и дополнитель ными барабанами с закрепленными на них одними концами стальными лентами причем вторые концы стальньк лент связано с ползуном, а барабаны распо ложены на валу червячного колеса дополнительной червячной передачи, при этом указанное червячное колесо выполнено составным, а на ползуне выполнен реечный венец, находящийся в зацеплении с дополнительным зубчатым колесом, установленным на исполнительном органе. На фиг. 1 изображен механизм позиционирования исполнительного органа, например робота, разрез по плоскости, перпендикулярной оси барабана; на фиг, 2 - сечение А-А на фиг. На фиг. 3 - разрез Б-Б на фиг. 2. Шаговый двигатель 1 связан с червяком 2, находящимся в зацеплении с 82 двумя червячными колесами 3 и 4, связанными элементами привода перемещения, включающими основные барабаны со стальными лентами (не показаны) с подвижным звеном 5, находящемся в контакте с роликами (не показаны), установленными в опорах качения. Червяк 2 посредством муфты 6 связан с червяком 7 червячного редуктораs у которого червячное колесо состоит из двух частей 8 и 9. Последние валом 10 соединены с дополнительными барабанами 11 и 12, которые стальными лентами 13 и 14 связаны с ползунсм 15, несущим рейку 16, которая находится в зацеплении с н.енцом на втулке 17, установленной в корпусе 18. Втулка 17 содержит щлицевое отверстие 19, в котором расположен вал 20, установленный в подвижном звене робота 5 и несущий схват 21. Механизм работает следующим обра3 ом. При прямолинейном перемещении подвижного звена 5 привод позиционирования осуществляется через червяк 2, черв.ячные колеса 3 и 4 и основные барабаны (не показаны) со стальными лентами. При необходимости выполнить движение схвата 21 по спирали с помощью муфты 6 через червяк 7 и половины червячного колеса 8 и 9 вращают дополнительные барабаны 11 и 12, которые через стальные ленты 13 и 14 перемещают ползун 15 с рейкой 16, которая вращает венец и втулку 17, вращающую через шлицевое отверстие 19 вал 20. При прямолинейном перемещении подвижного звена 5 с валом 20 и одновременном вращении вала 20 схват 21 совершает движение по спирали. Конструкция механизма позиционирования исполнительного органа позволяет выполнять примолинейное движение исполнительного органа, движение по спирали, вращение схвата, что значительно расширяет технологические возможности робота.
Фиг. 2 5-6 12 rf
21
-f
Фиг.З У////////АЛШ 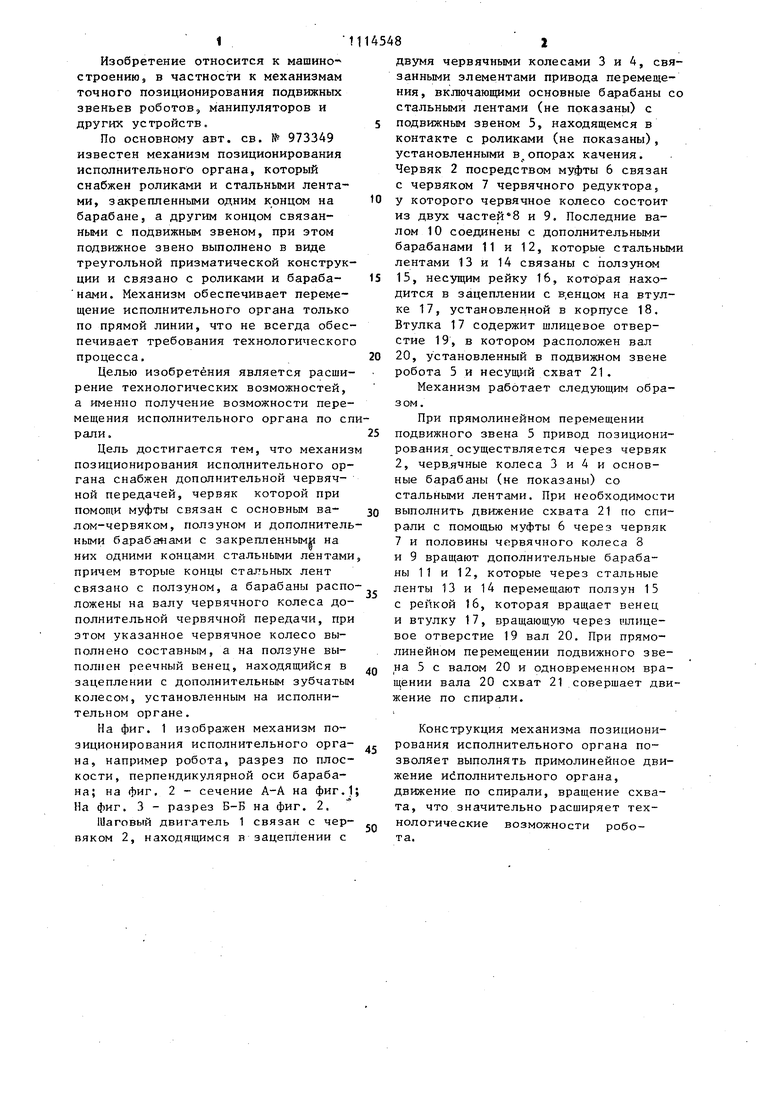
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм позиционирования исполнительного органа робота | 1981 |
|
SU973349A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Устройство для перемещения исполнительных органов станков с чпу | 1980 |
|
SU897467A1 |
| Двухкоординатный стол | 1989 |
|
SU1773668A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Автооператор | 1989 |
|
SU1710338A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| ГИДРОМЕХАНИЧЕСКИЙ ГРЕЙФЕР | 1999 |
|
RU2165386C2 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
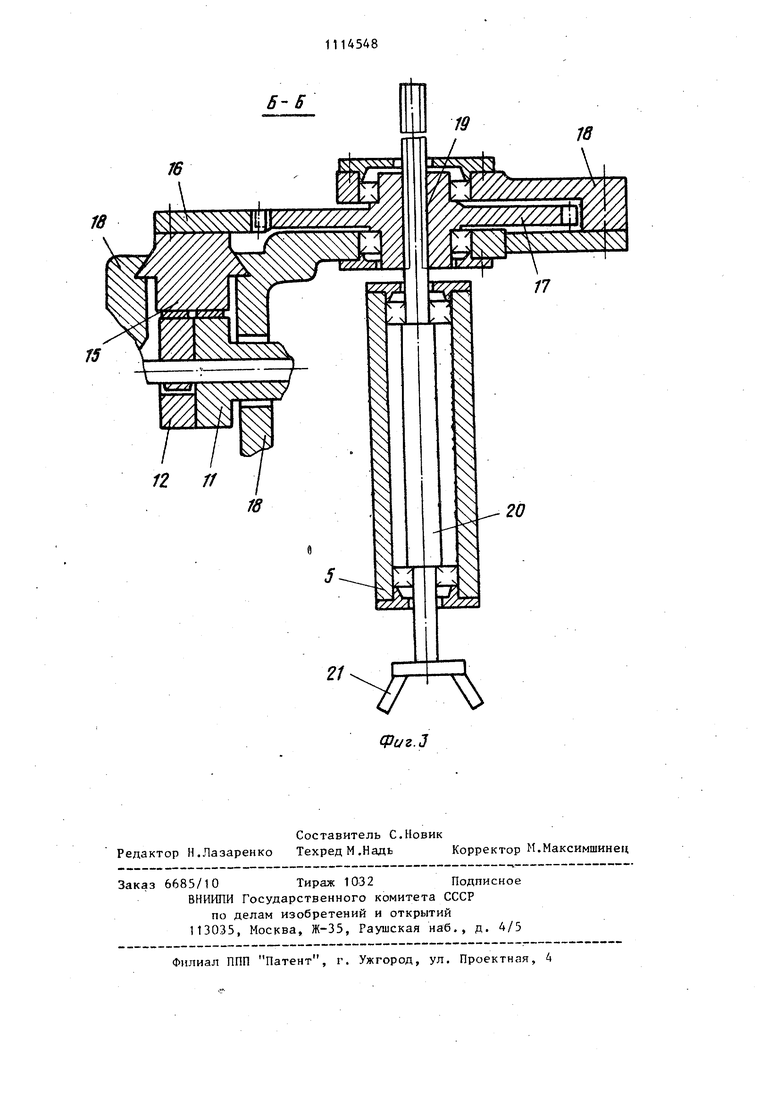
МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА по авт. св. № 973349, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительной червячной передачей , червяк которой при помощи муфты связан с основным валсм-червяком, ползуном и дополнительными барабанами с закрепленными на них одними концами стальными лентами, причем вторые концы стальных лент связаны ползуном, а барабаны расположены нч валу червячного колеса дополнительной червячной передачи, при этом указанное червячное колесо выполнено составным, а на ползуне выполнен реечный венец, находящийся в зацеплении с дополнительным зубчатым колесом, установленным на исполнительном органе.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм позиционирования исполнительного органа робота | 1981 |
|
SU973349A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
