Изобретение относится к машиностроению, в частности к механизмам точного позиционирования подвижных звеньев роботов, манипуляторов и других устройств, и может быть использовано в конструкциях роботов с числовым программным управлением, например контролирующих или измерительных.
.Известен механизм позиционирования исполнительного органа, содержащий подвижное звено, установленное в опорах, и кинематическую цепь привода перемещения подвижного -венаС.
Однако известная конструкция характеризуется недостаточной точностью позиционирования и сложностью конструкции.
Цель изобретения - повышение точности позиционирования.
Поставленная цель достигается тем, что механизм позиционирования исполнительного органа робота снабжен роликами и стальными лентами, закрепленными одним концом на барабане, а другим концом связанными с подвижным звеном, при этом подвижное звено выполнено в виде треу1ольноП призматичпской конструкции и связано с рочиксчми и барабанами.
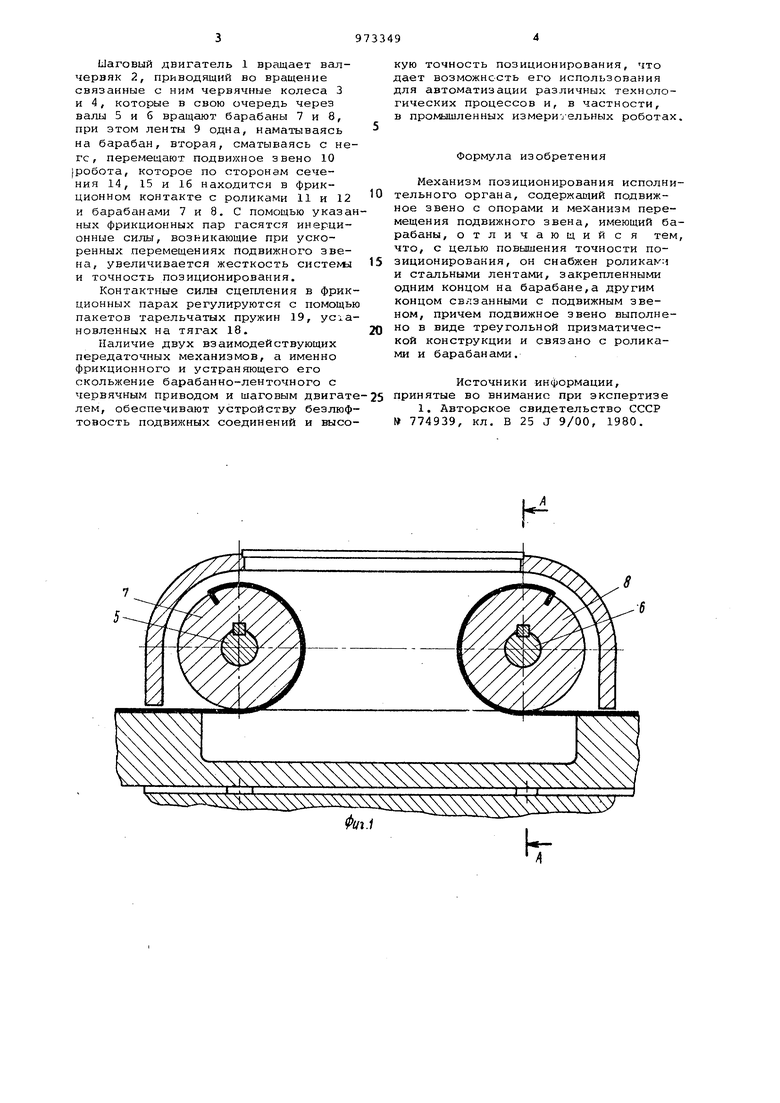
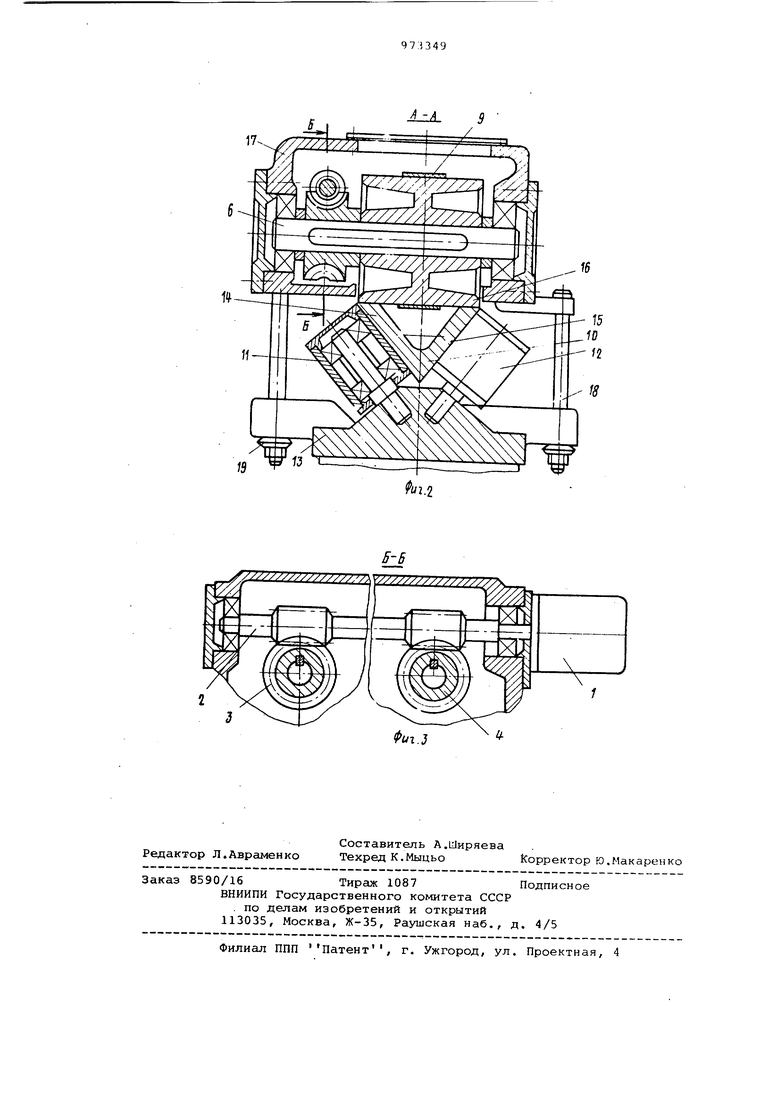
На фиг.1 изображен механизм позиционирования робота, разрез по плоскости, перпендикулярной оси барабана; на фиг.2 - сечение А-А на фиг.1; на фиг.З - резрез Б-Б на фиг.2.
Шаговый двигатель 1 связан с валом-червяком 2, находящимся в зацеплении с двумя червячными колеса10ми 3 и 4 равного диаметра, связанными каждое валами 5 и б с барабанами 7 и в цилиндрической формы, несущим на цилиндрической поверхности предварительно напряженную сталь15ную ленту 9, вторым концом закрепленную на крайней точке подвижного звена 10, находящегося в контакте с роликами 11 и 12, установленными в опорах каче)ия на неподвижной
20 стойке 13 робота.
Контакт подвижного звена 10 с роликом 11 по плоскости 14 и с роликом 12 по плоскости 15, а также с барабаном 7 и 8 по плоскости 16
25 является фрикционным. Неподвижная стойка 13 робота связана с корпусом 17 тягами 18 с комплектом тарельчатых пружин 19,
Механизм работает слплук гяир-1 с о30разом. Шаговый двигатель 1 вращает валчервяк 2, приводящий во вращение связанные с ним червячные колеса 3 и 4, которые в свою очередь через валы 5 и 6 вращают барабаны 7 и 8, при этом ленты 9 одна, наматываясь на барабан, вторая, сматываясь с не ге, перемещают подвижное звено 10 робота, которое по сторонам сечения 14, 15 и 16 находится в фрикционном контакте с роликами 11 и 12 и барабанами 7 и 8. С помощью указа ных фрикционных пар гасятся инерционные силы, возникающие при ускоренных перемещениях подвижного звена, увеличивается жесткость систе1«ы и точность позиционирования. Контактные силы сцепления в фрик ционных парах регулируются с помощь пакетов тарельчатых пружин 19, ycia новленных на тягах 18. Наличие двух взаимодействующих передаточных механизмов, а именно фрикционного и устраняющего его скольжение барабанно-ленточного с червячным приводом и шаговым двигат лем, обеспечивают устройству безлюф товость подвии ных соединений и высо кую точность позиционирования, что дает возможность его использования для автоматизации различных технологических процессов и, в частности, в промышленных измepиJeльныx роботах. Формула изобретения Механизм позиционирования исполнительного органа, содержгиций подвижное звено с опорами и механизм перемещения подвижного звена, имеющий барабаны, отличающийся тем, что, с целью повьошения точности позиционирования, он снабжен роликам: и стальными лентами, закрепленными одним концом на барабане,а другим концом связанными с подвижным звеном, причем подвижное звено выполнено в виде треугольной призматической конструкции и связано с роликами и барабанами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 774939, кл. В 25 J 9/00, 1980.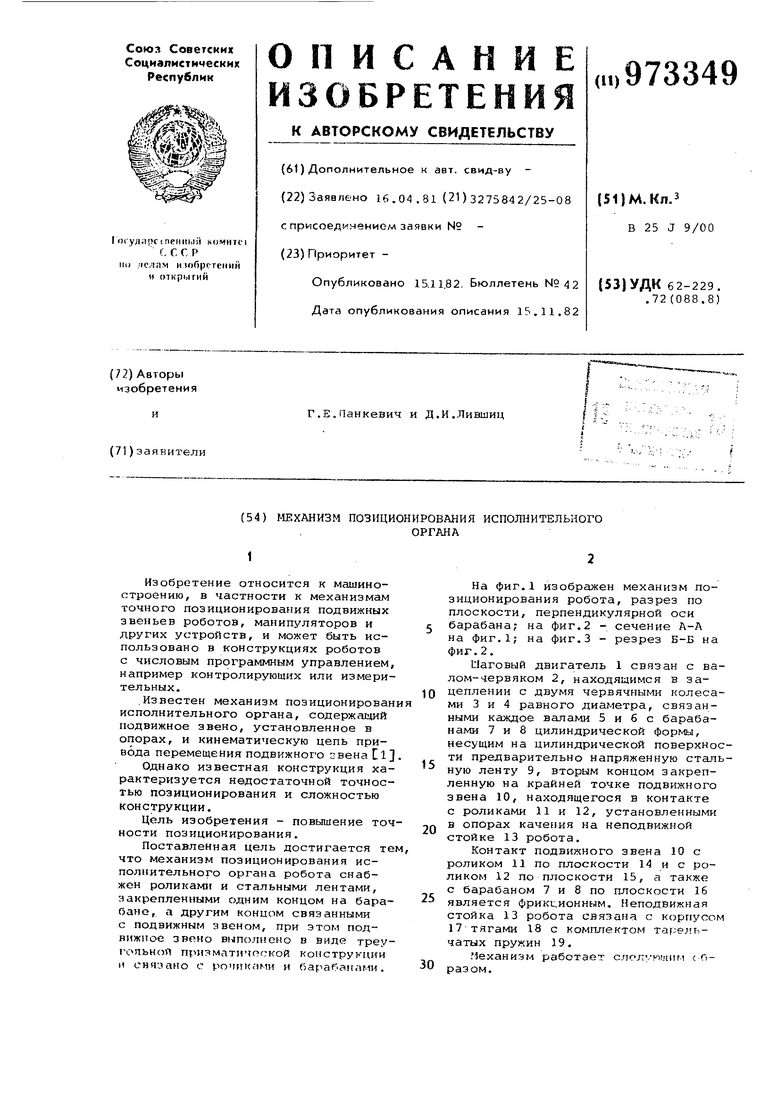
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Устройство для перемещения исполнительных органов станков с чпу | 1980 |
|
SU897467A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Исполнительный орган промышленного робота | 1988 |
|
SU1530442A1 |
| Устройство позиционирования исполнительного органа | 1985 |
|
SU1306708A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
-.
