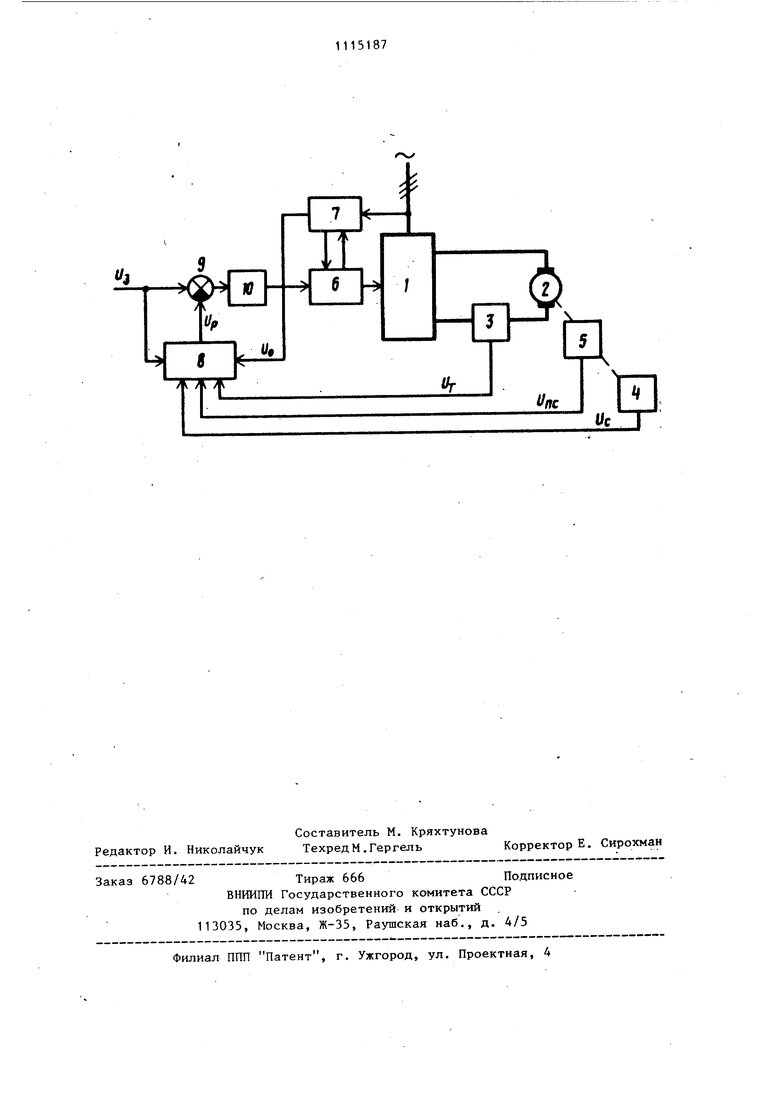
. 1 Изобретение относится к электротехнике, в частности к электроприводам постоянного тока с питанием якоря двигателя от тиристорного преобра зователя и может быть использовано, если к электроприводу предъявляется требование предельного быстродействия по скорости. Известен способ управления тиристорным электроприводом, заключающийся в том, что формируют напряжение задания, пропорциональное среднему значению скорости двигателя, и синхронизированное с напряжением источника питания напряжение развертки, измеряют мгновенное значение скорости двигателя, открывают очередной тиристор преобразователя в момент равенства двух сравниваемых напряженки, одним из которых является напряжение развертки.Напряжение, с которым сравнивают напряжение развертки, формируют как функцию двух напряжений - задания и напряжения, пропорционального мгновенному значению скорости и тока 11. Недостатком известного способа является низкое быстродействие при регулировании скорости электропривода. Попытки повышения быстродействия приводят при данном способе управления к ухудшению качества переходных процессов и возникновению автоколебаний системы на субгармонических частотах. Наиболее близким к изобретению по технической сущности является спо соб управления тиристорным электроприводом, при котором формируют напряжение задания, пропорциональное среднему значению скорости (этому значению скорости в установившемся режиме работы соответствует заданный угол управления), и синхронизированное с источником питания напряжение развертки, измеряют мгновенное значение скорости двигателя и его первой производной, сравнивают два напряжения, одним из которых являет ся напряжение развертки, и по равен ству последних формируют импульсное напряжение управления тиристорным преобразователем электропривода. Этот способ управления учитьгеает особенности тиристорного преобразо.вателя как дискретного нелинейного элемента системы управпения. Способ основан на отыскании такого момента 71 открывания очередного тиристора, при котором в момент, соответствующий открыванию следующего за очередным тиристора с заданным углом управления, значение скорости равнялось бы заданному. Подобная задача принципиально разрешима, поскольку изменение скорости двигателя на интервале работы тиристора, открывшегося с углом управления at-, описьгоается в общем виде уравнением :Sl( Я,ос,-,г), где - статическая составляющая тока якоря электродвигателя;Jt,и S, - значения скорости и ее производной в момент открывания вентиля в начале рассматриваемого интервала; t - текущее время от начала интервала. Из условия, что момент времени Ъ должен соответствовать моменту открывания следующего тиристора с заданным углом управления cs.j, для момента получается следующее равенство t4S,.,-.,ll; где пп- пульсность схемы преобразователя; угловая частота питающей сети. Из условия, что скорость двигателя в момент времени t должна быть равна заданной Л, и учитывая равенство (2), из уравнения (1) получаем равенство вида 515«г(3с,5г,-, ,oL,,,). Из этого равенства при известных значениях 3,51. , Я. и заданных 5, И оСо, может быть найден угол управления оц, т.е. задача поиска момента открывания очередного тиристора при сформулированных условиях разрешима С 2 . Недостатком известного способа является то, что задача поиска момента очередного тиристора решается приближенно, так как не полностью учитывается нелинейная зависимость сигнала управления, подаваемого на вход системы импульсно-фазового управления, от фазы анодного напряже3ния, а также не учитьгеается статиче кая нагрузка двигателя, что приводит к снижению точности и быстродей ствия регулирования скорости. Целью изобретения является повышение точности и быстродействия регулирования скорости в системе тири торного электропривода. Поставленная цель достигается тем, что при способе управления тиристорным электроприводом, по котоpo fy формируют напряжение задания, пропорциональное среднему значению скорости, которому в установившемся режиме работы соответствует заданный угол управления, и синхронизированное с источником питания напряжение развертки, измеряют мгнове ное значение скорости двигателя и его первой производной, сравнивают два напряжения, одним из которых является напряжение развертки, и по равенству этих напряжений формируют импульсное напряжение управления преобразователем тиристорного элект ропривода, дополнительно непрерывно измеряют статическую составляющую якорного тока и формируют напряжени пропорциональное текущему фазовому углу ЭДС источника питания на аноде очередного готового к включению вентиля, отсчитываемому от момента естественного открывания этого вентиля, преобразуют эти два дополнительных напряжения, напряжение задания и напряжения, пропорциональные значениям скорости двигателя и ее первой производной, в напряжение развертки, причем значение напряжения развертки в любой рассматриваемый момент времени пропорционально скорости, которой достиг бы двигатель при открывании очередного вентиля в рассматриваемый момент времени к моменту открывания следующего за очередным вентиля с заданным углом управления, и в качестве напряжения, сравниваемого с напряжени ем развертки, используют напряжение задания. На чертеже показана структурная схема одного из вариантов устройств реализующего способ. Устройство содержит тиристорный преобразователь 1, подключенный к якорю 2 двигателя постоянного тока, датчик 3 статической составляющей тока якоря, датчик 4 скорости двига 874 теля и датчик 5 первой производной скорости двигателя. Управляющие электроды вентилей преобразователя соединены с выходом одноканального формирователя-распределителя 6 импульсов, второй выход которого соединен с первым входом генератора 7 опорного сигнала, второй вход которого соединен с сетью, питающей преобразователь 1. Генератор 7 имеет два выхода, один из котЬрых соединен с первым входом формирователяраспределителя 6, а другой - с первым входом блока 8 формирования развертки, имеющего пять входов. На второй вход блока 8 подан сигнал задания Uj, а к оставшимся трем входам блока подсоединены выходы датчиков 3-5. Выход блока 8 соединен с отрицательным входом элемента 9 сравнения, на положительный вход которого подан сигнал задания U. Выход элемента 9 соединен с входом нуль-органа 10, выход которого соединен с вторым входом формирователяраспределителя 6. Устройство работает следующим образом. 1 Импульсы управления на тиристоры преобразователя поступают в моменты, когда сигнал развертки Jp становится меньше, чем сигнал задания U . Эти моменты фиксируются срабатыванием нуль-органа 10, от которого сигнал о срабатывании поступает на формирователь-распределитель 6. Последний формирует в моменты срабатывания нуль-органа 10 импульсы управления и направляет их на управляющие электроды соответствующих тиристоров преобразователя 1. Сигнал задания Uj формируется как сигнал, пропорциональный среднему значению заданной скорости Si двигателя 2. Сигнал развертки Up формируется блоком 8 в функции пяти сн1налов, а именно: сигнала задания Уэ, ; сигнала UT , пропорционального статическому току J от датчика статического тока; сигнала U, пропорционального скорости Л от датчика скорости; сигнала Unc . пропорционального первой производной скорости S. от датчика производной скорости; сигнала опорного УО, пропорционального фазовому углу ий1ЭДС сети на аноде очередного вентиля, где время -t отсчитывается от момента естественного открывания для очередного вентиля. Для электропривода с соотношением электромеханической постоянной времени Тм к электромагнитной TQ вида блок 8 формирования развертки работает в соответствии с зависимостью
Up-FeS - - aWe - - - -Acos()t)+ &sin(-t-oi.4)OtV3c
а для электропривода с соотношением постоянных времени вида блок 8 работает в соответствии с зависимостью
Up e - t LGco3- - V , tK I (ot,-ca)t )а cos Жыг-М)
6stM(votj-Oi)t)-Jc
I где. ,
( w.
пары коэффициентов a , a, и a, b являются корнями характеристического уравнения тиристорного электропривода, которое имеет вид
Т,7ярПТ„РИ 0, (12) значения скорости и тока эаписаны в относительных единицах, при этом за базовую величину для тока принято а для скорости - (U - амплитудное значение напряжения сети.
Rg - полное сопротивление, якорной цепи; С- постоянный коэффициент двигателя).
Правая часть зависимостей (4)
и (5) является подробной записью правой части равенства (3), но вместо значения угла управления ot зависимости (4) и (5) содержат текущее значение фазового угла uot ЭДС
сети нааноде очередного тиристора, готового к включению с искомым углом управления ol,. Значение фазового угла на аноде очередного тиристора точно равно значению угла управления
в момент открывания этого тиристора.
Сигнал развертки Up является кусочнонепрерывным сигналом, который на интервале от включения одного
вентиля до включения очередного монотонно убывает с ростом фазового угла(u)tдля очередного вентиля. Очередной тиристор открывается в момент равенства сигнала развертки Up и
сигнала задания U-a, . В этот момент, благодаря выбранной форме развертки, для системы выполняется равенство (3). Это означает, что при неизмен- . ных 5, и 3j, к моменту открывания
следующего тиристора с заданным углом управления otj значение скорости двигателя равно заданному. Таким образом решается задача определения момента открывания оче)едного тиристора.
Применение данного способа управления позволит повысить точность и быстродействие контура регулирования скорости тиристорного электропривода, что, в свою очередь, повысит быстродействие и точность контура регулирования положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тиристорным электроприводом | 1984 |
|
SU1169127A1 |
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Способ регулирования вентильного электропривода постоянного тока | 1976 |
|
SU657556A1 |
| Способ стабилизации тока вентильного преобразователя и устройство для его осуществления | 1975 |
|
SU866548A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Способ регулирования тока нагрузки вентильного электропривода | 1979 |
|
SU864487A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
| Способ регулирования частоты вращения электродвигателя переменного тока | 1987 |
|
SU1471277A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |
| Способ управления тиристорным преобразователем и устройство для его осуществления | 1982 |
|
SU1083324A1 |
СПОСОБ УПРАВЛЕНИЯ ТИРИСТОР.НЫМ ЭЛЕКТРОПРИВОДОМ, по которому формируют напряжение задания, пропорциональное среднему значению скорост;и, которому в установившемся режиме работы соответствует заданный угол управления, и синхронизированное с источником питания напряжение развертки, измеряют мгновенное значение скорости двигателя и его первой производной, сравнивают два на пряжения, одним из которых является напряжение развертки, и по равенству этих напряжений формируют импульсное напряжение управления преобразователем тнристорного электропривода, отличающийся тем, что, с целью повышения точности и быстродействий регулирования скорости двигателя, дополнительно непрерывно измеряют статическую составляющую якорного тока и формируют напряжение. пропорциональное текущему фазовому узлу ЭДС источника питания на аноде очередного готового к включению вентиля, отсчитываемому от момента естественного открывания этого вентиля, преобразуют эти два дополнительных напряжения, напряжение задания и напряжения, пропорциональные значениям скорости двигателя и ее первой про-, изводной, в напряжение развертки, причем значение напряжения развертки в любой рассматриваемый момент времени пропорционально скорости, которой достиг бы двигатель при открывании очередного вентиля в рассматриваемый момент времени к моменту открывания следующего за очередным вентиля с заданным углом управсл ления, и в качестве напряжения, сравниваемого с напряжением разверт00 ки, используют напряжение задания. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Поздеев А.Д | |||
| и др | |||
| Динамика вентильного электропривода постоянного тока | |||
| М., Энергия, 1975 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления вентильнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU838988A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
