1 .
Изобретение относится к электротехнике, в частности к быстродействующим электроприводам постоянного тока с питанием якоря двигателя от тиристорного управляемого вьшрямите- ля.
Целью изобретения является повышение точности регулирования скорости.
На фиг.1 представлена схема электропривода; на фиг.2 и 3 - диаграммы, поясняющие его работу.
Устройство содержит тиристорный преобразователь 1, питающий якорь 2 двигателя постоянного тока, датчик 3 тока якоря, датчик 4 скорости, дат- чик 5 статической составляющей тока, два входа которого соединены с выходом датчика 3 тока и с выходом датчика 4 скорости. Тиристоры преобразователя соединены с блоком 6 формирования и распределения импульсов, второй выход которого соединен с блоком 7 задания текущего угла.-Второй вход блока 7 задания текущего угла соединен с сетью, питающей преобразовав тель 1. Блок 7 задания текущего угла три выхода, первый из которых соединен с входом блока 6 формирования и распределения импульсов, а второй и третий выходы соединены соответственно с двумя входами моделирующего блока 8. Другие три входа моделирующего блока 8 подсоединены к выходам датчика 3 тока, датчика 4 скорости и датчика 5 статического тока.Сигнал задания максимального значения скорости Q подается на один из входов блока 9 сравнения скоростей, другой вход которого соеди- нен с первым выходом моделирующего блока 8. Сигнал задания максимального тока подается на один из входов блока 10 сравнения токов, другой вход- которого соединен с вторым выходом моделирующего блока 8 Выход блока сравнения скоростей соединен с первым входом триггера 11 . Выход блока 10 сравнения токов соеди нен с первым входом триггера 12. Вторые входы триггеров 11 и 12 соединены с третьим выходом блока 7 задания текущего угла. Выходы-триггеров 11 и 12 соединены с двумя входами злемента И 13, выход которого подключен к блоку 6 формирования и распределения импульсов.
Устройство для реализации способа работает следующим образом.
Импульсы управления на тиристоры преобразователя 1 подаются от.формирователя-распределителя 6 в моменты, определяемые срабатыванием схемы И 13. Датчики тока 3 и скорости 4 непрерывно измеряют мгновенные значения соответственно якорного тока l и скорости двигателя Q , Датчик 5 статического тока вычисляет текуще значение статического тока I на основе мгновенных значений тока I и скорости Q . Блок 7 задания текущего угла вырабатьгеает напряжение,пропорциональное текущему значению угла управления Ы, на очередном вентиле, готовом к включению. Этот же блок 7 вырабатьшает сигнал S, синхронизирующий работу формирователя-распределителя 6 с сетью. С третьего выхода блока 7 снимается сигнал Р, период которого равен длительности дискретного интервала, причем длительность дискретного интервала выбирается в десятки раз меньше длительности периода проводимости преобразователя.
Блок 7 синхронизируется с сетью и управляется сигналом г, содержащим информацию о том, какой из вентилей будет включен блоком 6 формирования и распределения импульсов. В начале
каждого интервала дискретности, в момент формирования синхросигнала Р, блок 7 задания текущего угла формирует новое значение углаоб, .Также по сигналу Р в моделирующий блок 8 заносятся текущие значения величин тока I, статического тока Ig, скорости Q и угла о6| и начинает производиться расчет кривых прогнозируемых значений скорости Qnp и тока 1пр в
ускоренном масштабе времени. Масщтаб времени выбирается из условия, что за один интервал дискретности необ- ходимо промоделировать процесс длительностью до 180 зл.град. Например,
при длительности интервала дискретности 55,5 МКС, что соответствует 1 зл.град, масщтаб времени т, с которым производится ускоренное моделирование (прогнозирование), равен
т 1/180.
Уравнения, в соответствии с которыми производится ускоренное моделирование прогнозируемого процесса,
представляют собой дифференциальные уравнения, описьшающие динамику силовой части тиристорного электропривода постоянного тока, на интервале , проводимости тиристора, но отличающиеся от них масштабом времени.
Т.., - cos( - )
пр IDP
пр
Т
(1)
d 2 п Р -г -г T«™rdt Р
СО. - угловая частота сети;
электромагнитная постоянная якорной цепи двигателя: Т,, - электромеханическая постоянная времени электро-, привода;
5U
t - текущее время, отсчитьшае- мое от точки естественной коммутации тиристора; m - пульсность тиристорного
преобразователя.
Прогнозируемые в ускоренном масштабе времени значения скорости Q сравниваются с сигналом задания максимальной скорости Oj блоком 9 срав- нения. Прогнозируемые в ускоренном масштабе времени значения тока 1„р сравниваются с сигналом задания максимального тока 1 блоком 1 О сравнения. При выполнении условий ,д, и Ij, Ijj, триггеры 11 и 12 соответственно переключаются в нулевое состояние. В единичное состояние они переключаются синхросигналом Р. В конце каждого дискретного интервала блоком 6 формирования и распределения импульсов анализируется состояние элемента И 13, при единичном состоянии которого формируется сигнал открывания очередного тиристора. В единич- ное состояние элемент 13 переходит при выполнении условия
(Q,p6S2,) Л (,).
(2)
При адекватности моделирующего блока 8 силовой части т 1ристорного электропривода прогнозируемая траектория скорости точно соответствует той кривой, по которой изменяется скорость реального электродвигателя. Поэтому, если открыть очередной тиристор в конце того дискретного интервала, на котором выполняется условие (2), скорость двигателя 2 не превысит заданного максимального значения Q,.., какой бы интервал провозМ
димости мы не рассматривали. Таким образом, при управлении электроприводом по предлагаемому способу дви- гатель может отработать без перерегулирования любой скачок задания скорости за минимально возможное число интервалов проводимости.
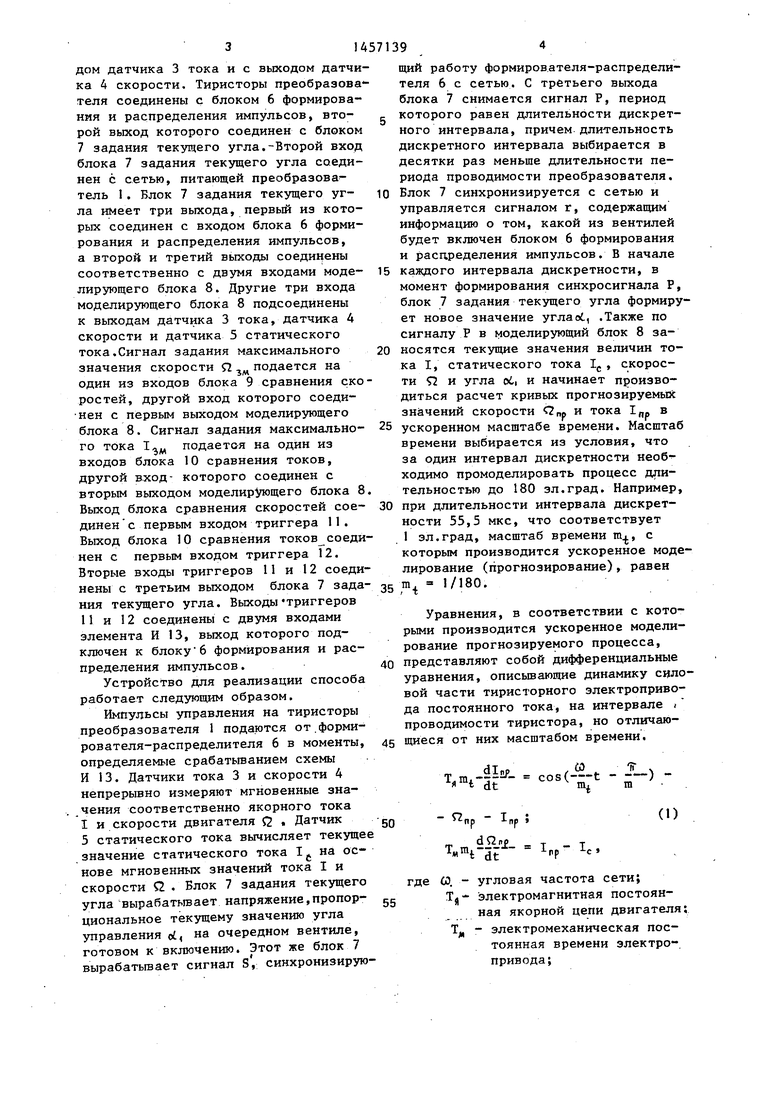
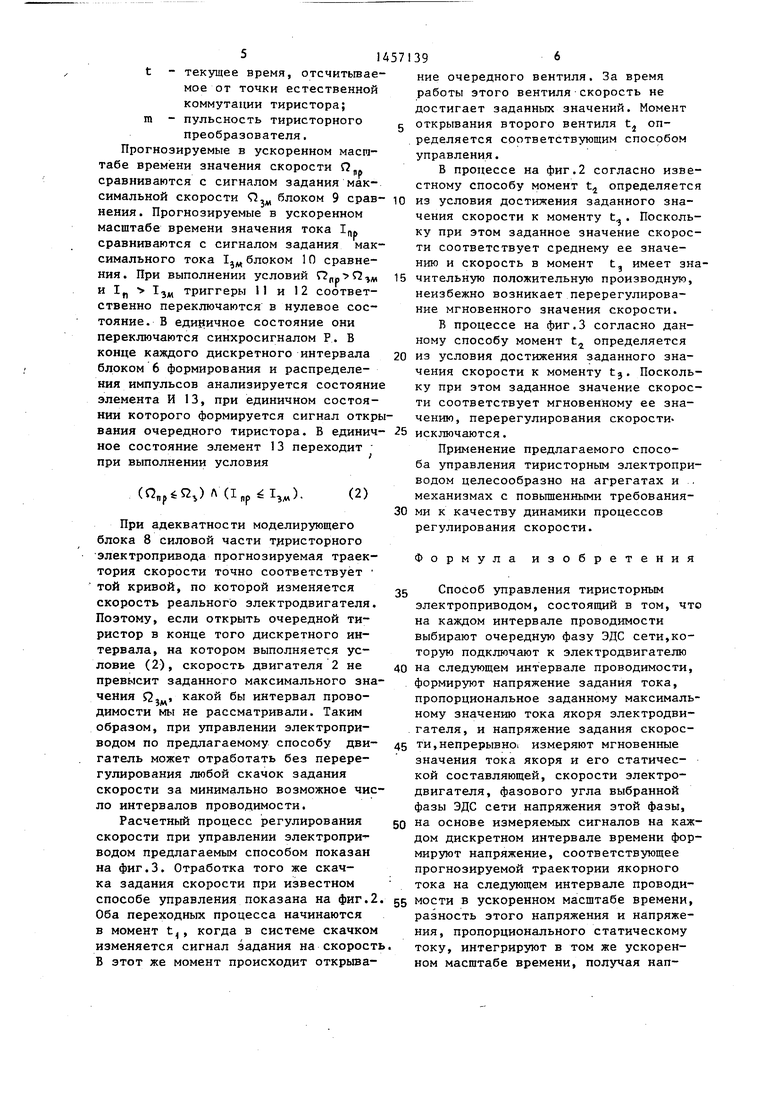
Расчетный процесс регулирования скорости при управлении электропри- водом предлагаемым способом показан на фиг.З. Отработка того же скачка задания скорости при известном способе управления показана на фиг.2 Оба переходных процесса начинаются в момент t, когда в системе скачком изменяется сигнал задания на скорост В этот же момент происходит открыва
5 0 5
0
0
5
0 g
396
ние очередного вентиля. За время работы этого вентиля скорость не достигает заданных значений. Момент открывания второго вентиля tj определяется соответствующим способом управления.
В процессе на фиг.2 согласно известному способу момент Ц определяется из условия достижения заданного значения скорости к моменту Ц. Поскольку при этом заданное значение скорости соответствует среднему ее значению и скорость в момент t, имеет значительную положительную производную, неизбежно возникает перерегулирование мгновенного значения скорости.
В процессе на фиг.З согласно данному способу момент t определяется из условия достижения заданного значения скорости к моменту t. Поскольку при этом заданное значение скорости соответствует мгновенному ее значению, перерегулирования скорости исключаются.
Применение предлагаемого способа управления тиристорным электроприводом целесообразно на агрегатах и . механизмах с повьшенными требованиями к качеству динамики процессов регулирования скорости.
Формула изобретения
Способ управления тиристорным электроприводом, состоящий в том, что на каждом интервале проводимости выбирают очередную фазу ЭДС сети,которую подключают к электродвигателю на следующем интервале проводимости, формируют напряжение задания тока, пропорциональное заданному максимальному значению тока якоря электродвигателя, и напряжение задания скорости, непрерывно измеряют мгновенные значения тока якоря и его статической составляющей, скорости электродвигателя, фазового угла выбранной фазы ЭДС сети напряжения этой фазы, на основе измеряемых сигналов на каждом дискретном интервале времени формируют напряжение, соответствующее прогнозируемой траектории якорного тока на следующем интернале проводимости в ускоренном масштабе времени, разность этого напряжения и напряжения, пропорционального статическому току, интегрируют в том же ускоренном масштабе времени, получая напЛ|К
/ Л
ад:
, tz 8 is / 16
.г
го
г t.Hc
t, tz3 }Zt3 J6
Фие.З
Составитель М.Кряхтунова
Редактор А.Ворович Техред М.Дидык 11.Л.„
Заказ 7492/56 Тираж 548Подписное
ВНШПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
114 t, 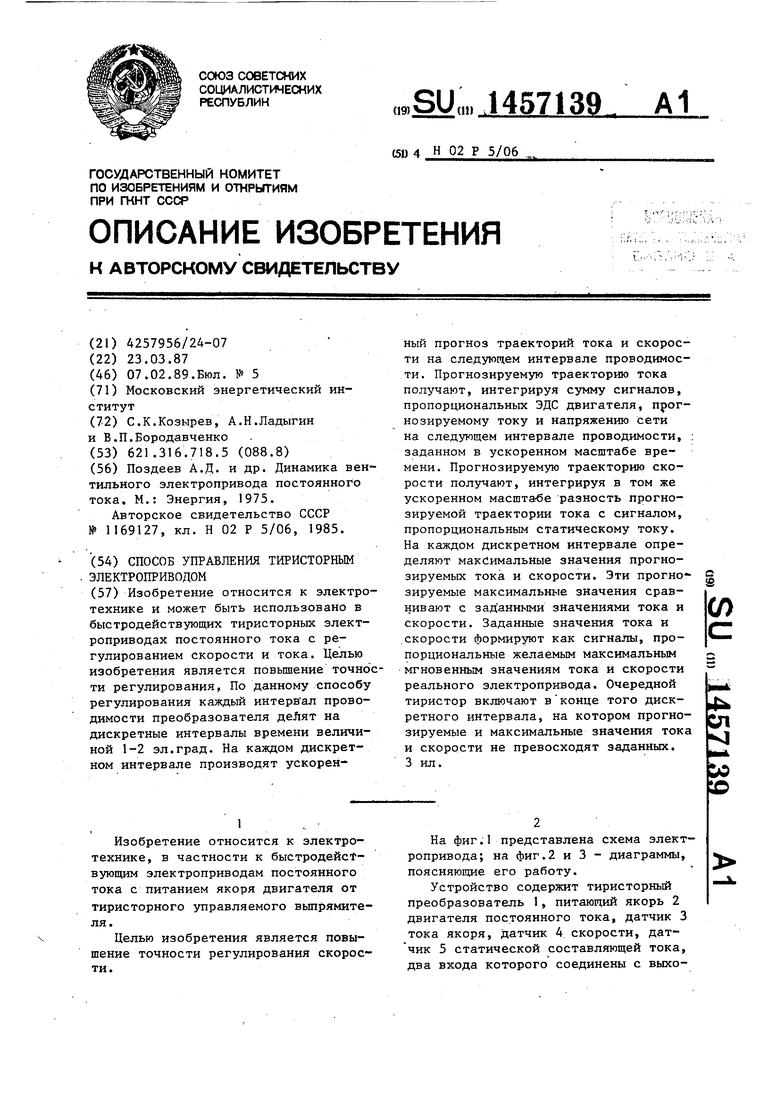
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тиристорным электроприводом | 1984 |
|
SU1169127A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1115187A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
| Способ управления тиристорным преобразователем | 1987 |
|
SU1539934A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Автоматизированный тиристорный электропривод постоянного тока и способ управления им | 1982 |
|
SU1171945A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |

Изобретение относится к электротехнике и может быть использовано в быстродействующих тиристорных электроприводах постоянного тока с регулированием скорости и тока. Целью изобретения является повышение точно с- ти регулирования. По данному способу регулирования каждый интервал проводимости преобразователя деЛят на дискретные интервалы времени величиной 1-2 эл.град. На каждом дискретном интервале производят ускоренный прогноз траекторий тока и скорости на следующем интервале проводимости. Прогнозируемую траекторию тока получают, интегрируя сумму сигналов, пропорциональных ЭДС двигателя, прогнозируемому току и напряжению сети на следующем интервале проводимости, : заданном в ускоренном масштабе времени. Прогнозируемую траекторию скорости получают, интегрируя в том же ускоренном масшта-бе разность прогнозируемой траектории тока с сигналом, пропорциональным статическому току. На каждом дискретном интервале определяют максимальные значения прогнозируемых тока и скорости. Эти прогнозируемые максимальные значения сравнивают с зад анными значениями тока и скорости. Заданные значения тока и .скорости формируют как сигналы, пропорциональные желаемым максимальным мгновенным значениям тока и скорости реального электропривода. Очередной тиристор включают в конце того дискретного интервала, на котором прогнозируемые и максимальные значения тока и скорости не превосходят заданных. 3 ил. с (Л :л 1 :о ю
| Поздеев А.Д | |||
| и др | |||
| Динамика вентильного электропривода постоянного тока | |||
| М.: Энергия, 1975 | |||
| Способ управления тиристорным электроприводом | 1984 |
|
SU1169127A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
