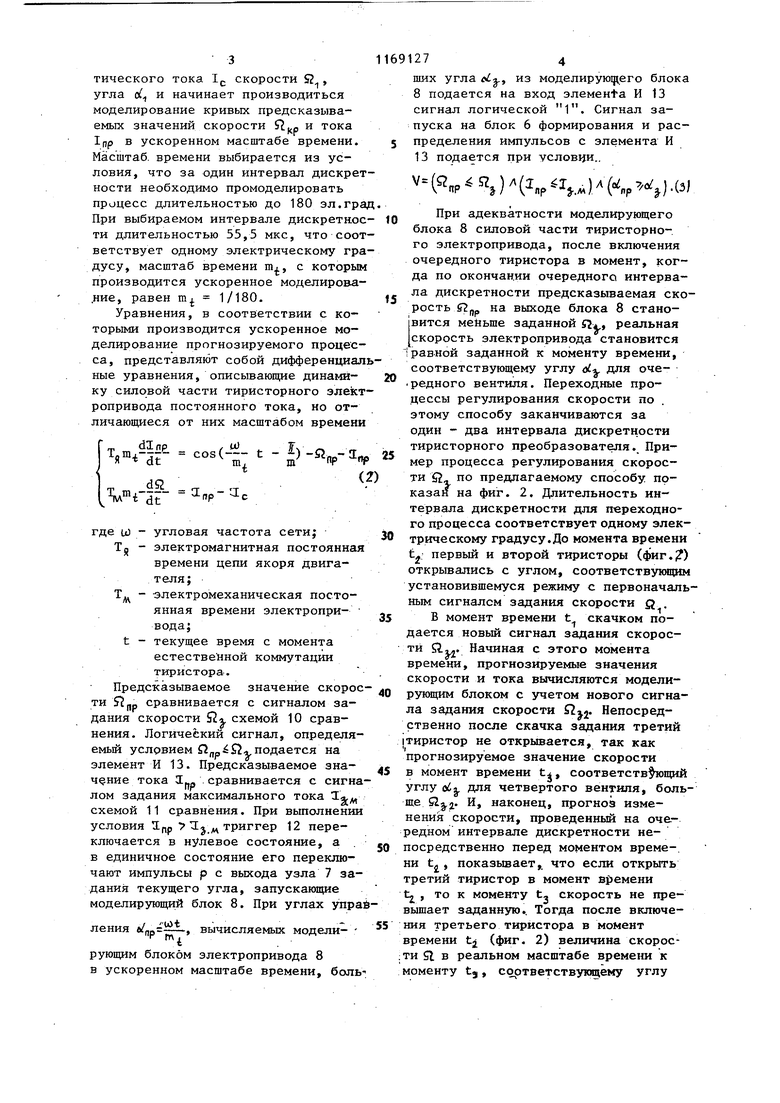
Изобретение относится к электротехнике, в частности к быстродей-ствующим электроприводам постоянного тока с питанием якоря двигателя от тиристорного управляемого выпрямителя, и может быть использовано в быстродействующих электроприводах постоянного тока, например, для приводов нажимных устройств, летучих ножниц и т.п. Целью изобретения является повышение быстродействия регулирования скорости тиристорного электропривода. На фиг. 1 показана структурная схема одного из вариантов устройства для реализации способа; на фиг.2 графики переходных процессов отрабо ки скачка сигнала задания скорости по предлагаемому способу. Устройство содержит тиристорный преобразователь .1.,- подключенный к якорю 2 электродвигателя постоянного тока, датчик 3 тока якоря, дат чик 4 скорости, датчик 5 статическо составляющей тока 5, два-входа кото рого соединены с выходом датчика 3 тока и с выходом датчика 4 скорости. Тиристоры преобразователя сое динены с блоком 6 формирования и ра пределения импульсов, второй выход которого соединен с узлом 7 задания текущего угла. Второй вход узла 7 задания текущего угла соединен с сетью, подключенной к преобразовате лю 1. Узел 7 задания текущего угла, имеет три выхода, один из которых .соединен с входом блока 6 формирова ния и распределения импульсов, а два других соединены соответственно с двумя входами моделирующего блока 8. Другие три входа моделирующего блока 8 подсоединены к выходам датчика 3 тока, датчика 4 скорости и датчика 5 статического тока. Один из входов моделирующего блока 8 соединен с выходом функциональ ного преобразователя 9. На один из входов функционального преобразователя 9 подается сигнал задания скорости S2 а второй вход соединен с выходом датчика 5 статического то ки. Сигнал задания скорости SZj, подается на один из входов схемы 10 сравнения скоростей, другой вход которрй соединен с первым выходом моделирующего блока 8. Сигнал задания максимального тока подается на один из входов схемы 11 7 сравнения токов, другой вход кото-рой соединен с вторьм выходом моделирующего блока 8. Выход схемы 11 сравнения токов соединен с одним из входов триггера 12, другой вход которого соединен с вторым выходом узла 7 задания текущего угла. Выход схемы 10 сравнения скоростей, выход триггера 12 и третий выход моделирующего блока 8 соединены с тремя входами элемента И 13, выход которого подключен к блоку 6 формирования и распределения импульсов . Устройство для реализации способа работает следующим образом. Импульсы управления на тиристоры прёобразов-ателя 1 подаются от формирователя - распределителя 6 в моменты, определяемые срабатыванием схемы И 13. Датчики тока 3 и скорости 4 измеряют соответственно мгновенные значения тока 1 и скорости 52 двигателя. Датчик 5 статического тока вычисляет текущее значение статического тока на основе мгновенных значений тока I и скорости fH. Узел 7 задания текущего угла вырабатывает текущее значение угла 0 на очередном тиристоре, готовом к включению. Сигнал р для запуска моделирующего блока 8 и сигнал Vv включения очередного тиристора при максимальном угле включения ..Узeл 7 задания текущего угла синхронизуется с питающей сетью и управляется сигналом г, содержащим информацию о том, какой из вентилей будет включен блоком 6 формирования и распределения импульсов. . Функциональный преобразователь 9 вычисляет на основе сигнала задания и сигнала с датчика статического тока Ijj величину угла управления oCt, соответствующую установивщемуся режиму работы со скоростью 52-и статическим током Зс .f 1Йя,+ 1с J л мл arccost,-г-: -7-; (.1; sin ;//m m где m - число фаз вьшрямления преобразователя . В начале каждого интервала дискретности узел 7. задания текущего угла формирует новое значение угла 0 и вырабатывает синхросигнал р. По этому синхросигналу р в моделирующий блок 8 заносятся текущие значения величин тока I, статического тока I, скорости Я, угла 0 и начинает производиться моделирование кривых предсказываемых значений скорости и тока 1пр в ускоренном масштабе времени. Масштаб, времени выбирается из условия, что за один интервал дискрет ности необходимо промоделировать процесс длительностью до 180 эл.гра При выбираемом интервале дискретное ти длительностью 55,5 мкс, что соот ветствует одному электрическому гра Дусу, масштаб времени т, с которым производится ускоренное моделирова.ние, равен т 1/180. Уравнения, в соответствии с которыми производится ускоренное моделирование прогнозируемого процесса, представляют собой дифференциал ные уравнения, описывающие динамику силовой части тиристорного элект ропривода постоянного тока, но отличающиеся от них масштабом времени . - f) -«„n-I cos(t ПР r,p-Jc где w - угловая частота сети; Tjj - электромагнитная постоянная времени цепи якоря двигателя;Тд - электромеханическая постоянная времени электропри- вода; t - текущее время с момента естественной коммутации тиристора. Предсказываемое значение скорое ти 2„р сравнивается с сигналом задания скорости Й4, схемой 10 сравнения. Логический сигнал, определяемьй условием подается на элемент И 13. Предсказываемое знач ние тока 3„ .сравнивается с сигна лом задания максимального тока схемой 11 сравнения. При выполнении условия Inp триггер 12 переключается в нулевое состояние, а . в единичное состояние его переключают импульсы р с выхода узла 7 задания текущего угла, запускающие моделирующий блок 8. При углах упра ления e/n-z- -, вычисляемых моделирующим блоком электропривода 8 в ускоренном масштабе времени, боль ( пшх угла , из моделирую1рего блока 8 подается на вход элeмeнta И 13 сигнал логической 1. Сигнал запуска на блок 6 формирования и распределения импульсов с элемента И 13 подается при условии.. (1„р..(,,,|.(з, При адекватности моделирующего блока 8 силовой части тиристорного электропривода, после включения очередного тиристора в момент, когда по окончании очередного интервала дискретности предсказываемая скорость на выходе блока 8 становится мейьше заданной Sit.,) реальная скорость электропривода становится равной заданной к моменту времени, соответствующему углу oi для очередного вентиля. Переходные процессы регулирования скорости по этому способу заканчиваются за один - два интервала дискретности тиристорного преобразователя. Пример процесса регулирования скорости й- по предлагаемому способу показан на фиг. 2. Длительность интервала дискретности для переходного процесса соответствует одному электрическому градусу.До момента времени tv первый и второй тиристоры (фиг.) открывались с углом, соответствующим установившемуся режиму с первоначальным сигналом задания скорости Q В момент времени t скачком подается новый сигнал задания скорости Siij,. Начиная с этого момента времени, прогнозируемые значения скорости и тока вычисляются моделкрунмцим блоком с учетом нового сигнала задания скорости 52ij Непосредственно после скачка задания третий Тиристор не открывается, так как прогнозируемое значение скорости в момент времени t, соответств: ющий углу oil, для четвертого вентиля, больше й|,2. И, наконец, прогноэ изменения скорости, проведенный на очередном интервале дискретности непосредственно перед моментом време-. ни tj, показьтает, что если открыть третий тиристор в момент времени tj, , то к моменту t, скорость не превышает заданную.. Тогда после включения третьего тиристора в момент ремени tj (фиг. 2) величина скороси SI в реальном масштабе времени к оменту tg, соответствующему углу
aij, достигает заданного значения 52з . Однако производная скорости npHois t еще не соответствует уста- , новившемуся режиму. После включения четвертого тиристора в момент времени t процесс регулирования практически заканчивается, и после включения пятого тиристора в момент врезиустановившемся режиме, соответствующем заданному значению.
Применение предлагаемого способа управления тиристорным электроприводом позволит повысить производительность, например летучих ножниц, и получить за счет повышения точности регулирования и быстродействия электроприводов нажимных устройств в результате снижения брака и прокатки по минусовым допускам дополнительную прорукцйю.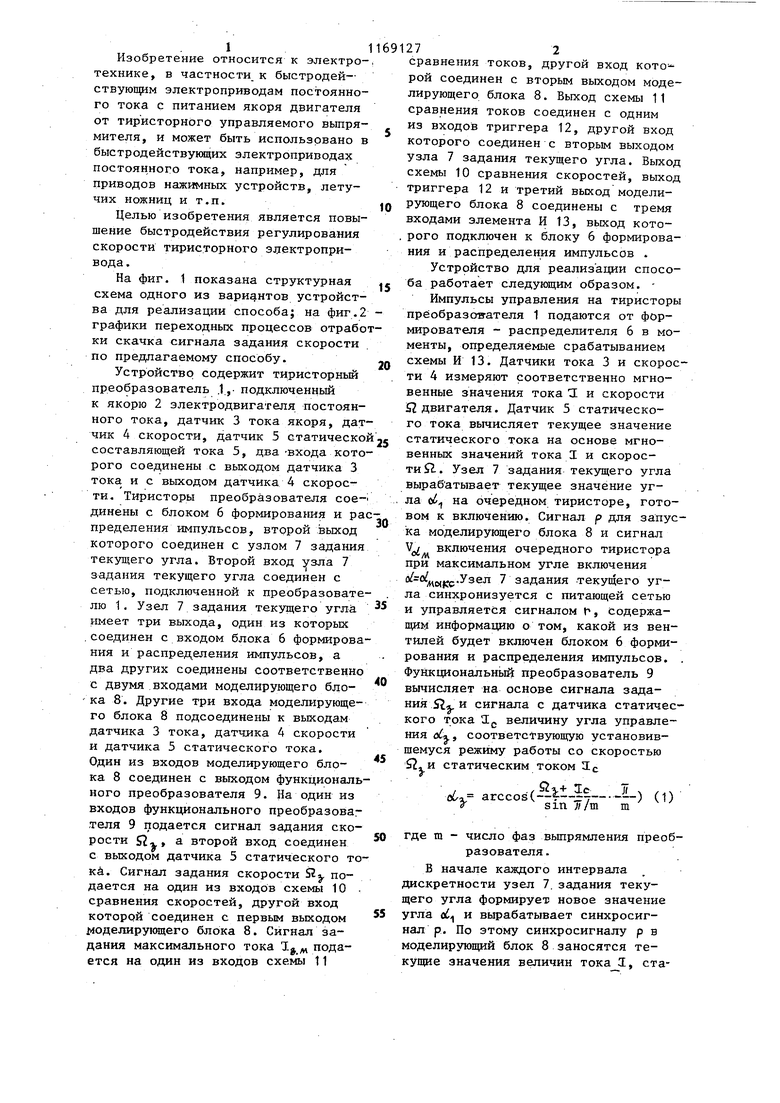
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Способ управления тиристорным электроприводом | 1982 |
|
SU1115187A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Тиристорный электропривод | 1981 |
|
SU966835A1 |
| Автоматизированный тиристорный электропривод постоянного тока и способ управления им | 1982 |
|
SU1171945A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРНЫМ ЭЛЕКТРОПРИВОДОМ, по которому на каждом интервале проводимости выбирают очередную фазу ЭДС сети, которую подключают к электродвигателю на следующем интервале проводимости, формируют напряжение задания тока, пропорциональное заданному максимальному значению тока якоря электродвигателя, и напряжение, пропорциональное заданному среднему значению скорости электродвигателя, непрерывно измеряют мгновенные значения тока якоря, скорости электродвигателя, фазового угла выбранной фазы ЭДС сети и напряжения этой фазы, на основе измеряемых сигналов на каждом дискретном интервале времени формируют напряжение, соответствующее прогнозируемой траектории тока на следующем интервале проводимости в ускоренном масштабе времени, это напряжение сравнивают с напряжением задания тока и по результатам сравнения на каждом дискретном интервале формируют.управляющее напряжение вентиля в выбранной фазе, отличающийся тем, что, с целью повьшения быстродействия регулирования, дополнительно непрерывно измеряют статическую составляющую тока якоря, определяют значение заданного угла управления, соответствующего установившейся работе электродвигателя с за данной скоростью, на каждом дискретном интервале времени интегрируют в ускоренном масштабе времени разность напряжений, пропорциональных прогнозируемой траектории тока и статическому току, при этом ограничивают длительность интервала интегрирования в ускоренном масштаа бе времени моментом;соответствующим со открыванию вентиля с заданным углом о управления в следующей за выбранной фазе, запоминают результат интегриvj рования до конца дискретного интервала, сравнивают в конце каждого дискретного интервала прогнозируемые значения тока и скорости с заданными и формируют управляющее напряжение вентиля в выбранной фазе в конце того дискретного интервала, на котором значения прогнозируемых тока и скорости не превосходят соответствунлцих заданных значений.
| Поздеев А.Д | |||
| и др | |||
| Динамика вентильного электропривода постоянного тока | |||
| М., Энергия, 1975, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
