Изобретение относится к электротехнике и может быть использовано дляуправления многодвигательным электроприводом в системе подчиненного уп вления с электрическим выб ром мертвого хода. Оно может исполь зоваться во всех отраслях хозяйства для управления электромеханическими объектами, содержащими зазоры. Устройство особенно перспективно в радиотелескопах, представляющих собой объект регулирования со значительны ми мертвыми ходами. Известны следящие электроприводы с электрическим выбором мертвого хоца, в которых на зубчатый венец глав ной оси объекта действуют два электродвигателя, причем«один из них работает в двигательном, а другой в тормозном режимах. При изменении направленная вращения функции двигате лей меняются, благодаря чему движени происходит без перехода через люфт. Если отсутствует динамический момент или момент нагрузки, то оба привода создают равный по величине и противоположный по знаку момент. Управление моментами осуществляется с помощью устройства выбора мертвого хода, распределяющего, сигнал регулятора скорости между регуляторами тока каждого привода - в определенном соотношении и подающего напряжения смещения одинаковой величины и противоположного знака на входы регуляторов тока для создания начального момента распора привода. При нелинейном распределении моментов двигателей из-за влияция упругости между двигателями возникают противофазные колебания, для исключения которых на входа токовых контуров подается сигнал обратной связи по разности скоростей двигателей l. Наиболее близким по -цехнической сущности к предлагаемому является .устройство для управления двухдвигательным электроприводог - содержшцее регулятор скорости, блок выбора мертвого хода, два замкнутых контура регулирования тока, объект регулирования и два тахогенератора, соединенные через первый сумматор с одним замкнутым контуром регулирования тока непосредственно, а с другим - через инвертор. В нем характеристика распора выполнена таким образом,что при достижении моментом нагрузки значения, равного половине максимально;-возможного, ток (момент) ведущего двигателя ограничивается номинальным значением, а ток /моментj второго тормозного двигателя меняет знак и при дальнейшем увеличении момента нагрузки до максимального значения приводы работают параллельно. Следовательно, при моменте нагрузки большем половины максимально возможного, тормозной двигатель переходит зазор и берет на себя часть нагрузки 2.
Однако в указанном устройстве быстрому переходу двигателя через зазор препятствует обратная связь по . разности скоростей, которая препятствует вращению .двигателей с разными скоростями. Вследствие этого происходит перегрузка ведущего двигателя, неравномерно загружается .редуктор, ухудшается точность и качество регулирования, т.е. снижены динамические качества устройства.
Целью изобретения является повышение точности и быстродействия.
Эта цель достигается тем, что в устройство введены последовательно соединенные нелинейный элемент с зоной нечувствительности и ограничением по верхнему уровню, интегратор, нелинейный элемент с зоной нечувствительности, второй сумматор, блок выделения модуля, ключевой элемент с зоной нечувствительности и блок перемножения, включенный в рассечку связи на выходе первого сумматора, при этом вход нелинейного элемента с зоной нечувствительности и ограничением по верхнему уровню подключен к выходу регулятора скорости, выход нелинейного.элемента с зоной нечувствительности соединен со вторым входом интегратора, выход которого подклгрчен ко второму входу второго сумматора. Благодаря такому выполнению глубина обратной связи по разности скоростей меняется в функции напряжения регулятора скорости.
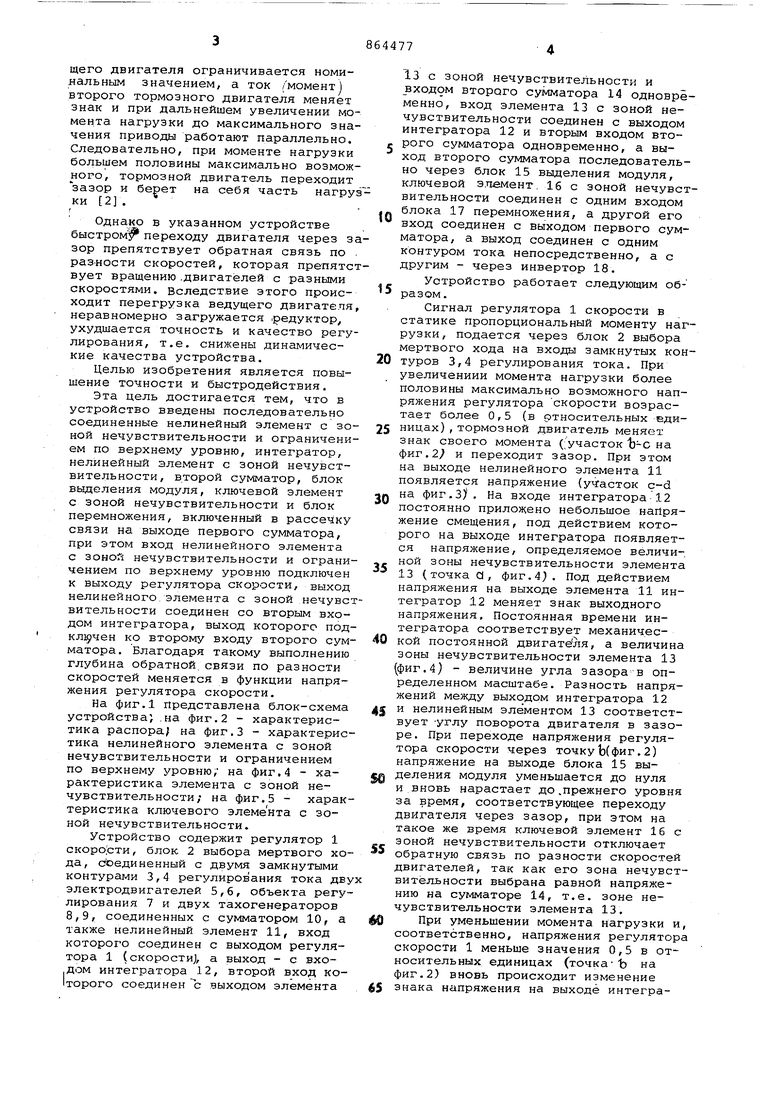
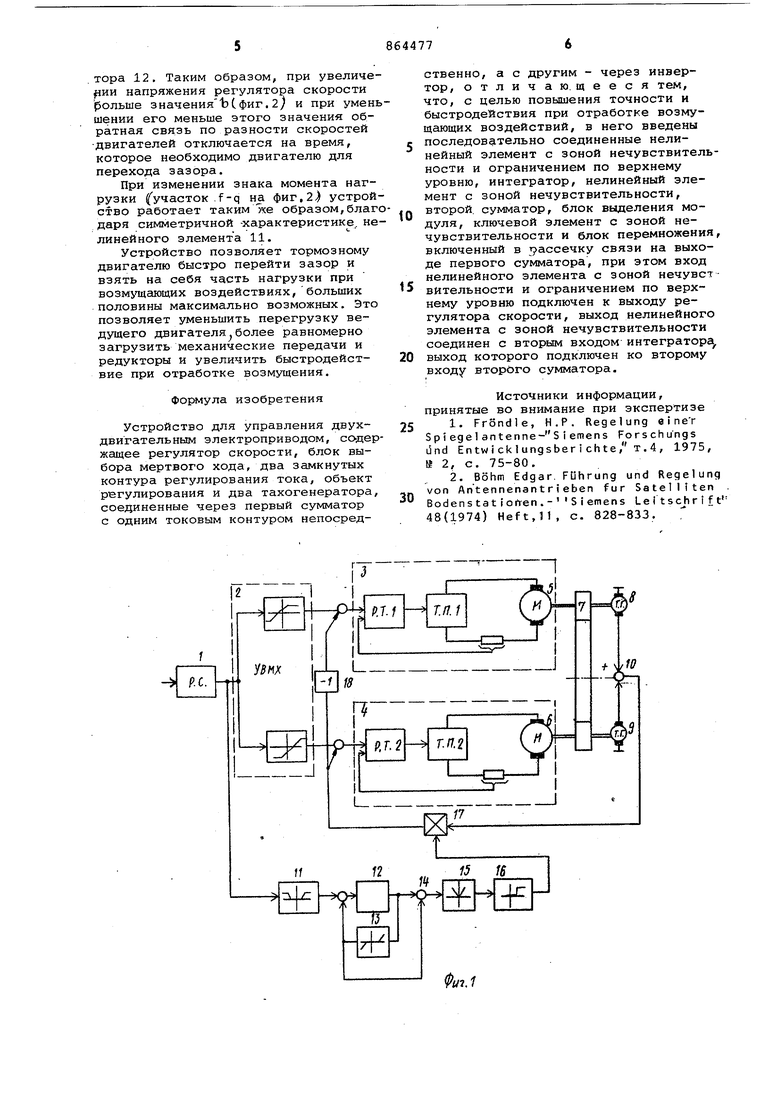
На фиг.1 Представлена блок-схема устройства) .на фиг.2 - характеристика распора; на фиг.З - характеристика нелинейного элемента с зоной нечувствительности и ограничением по верхнему уровню, на фиг. 4 - характеристика элемента с зоной нечувствительности/ на фиг.5 - характеристика ключевого элемента с зоной нечувствительности.
Устройство содержит регулятор 1 скоро.сти, блок 2 выбора мертвого хода, соединенный с двумя замкнутыми контурами 3,4 регулирования тока дву электродвигателей 5,6, объекта регулирования 7 и двух тахогенераторов 8,9, соединенных с сумматором 10, а также нелинейный элемент 11, вход которого соединен с выходом регулятора 1 (cKOpocTHj, а выход - с вхо.дом интегратора 12, второй вход коiTOporo соединен с выходом элемента
13 с зоной нечувствительности и входом второго сумматора 14 одновременно, вход элемента 13 с зоной нечувствительности соединен с выходом интегратора 12 и вторым входом второго сумматора одновременно, а выход второго сумматора последовательно через блок 15 выделения модуля, ключевой элемент. 16 с зоной нечувствительности соединен с одним входом блока 17 перемножения, а другой его вход соединен с выходом первого сумматора, а выход соединен с одним контуром тока непосредственно, а с другим - через инвертор 18.
Устройство работает следующим образом.
Сигнал регулятора 1 скорости в статике пропорциональный моменту нагрузки, подается через блок 2 выбора мертвого хода на входы замкнутых контуров 3,4 регулирования тока. При увеличениии момента нагрузки более половины максимально возможного напряжения регулятора скорости возрастает более 0,5 (в 9тносительных единицах) , тормозной двигатель меняет знак своего момента (;участок Ь-С на фиг.27 и переходит зазор. При этом на выходе нелинейного элемента 11 появляется напряжение (учгасток c-d на фиг.З), На входе интегратора-12 постоянно приложено небольшое напряжение смещения, под действием которого на выходе интегратора появляется напряжение, определяемое величиной зоны нечувствительности элемента 13 (точка а, фиг.4. Под действием напряжения на выходе элемента 11 интегратор 12 меняет знак выходного напряжения, Постоянная времени интегратора соответствует механической постоянной двигателя, а величина зоны нечувствительности элемента 13 (фиг. 4) - величине угла зазора в определенном масштабе. Разность напряжений между выхсздом интегратора 12 и нелинейным элементом 13 соответствует -углу поворота двигателя в зазоре. При переходе напряжения регулятора скорости через точкуЬ(фиг.2) напряжение на выходе блока 15 выделения модуля уменьшается до нуля и вновь нарастает до .прежнего уровня за время, соответствующее переходу двигателя через зазор, при этом на такое же время ключевой элемент 16 с зоной нечувствительности отключает обратную связь по разности скоростей двигателей, так как его зона нечувствительности выбрана равной напряжению на сумматоре 14, т.е. зоне нечувствительности элемента 13.
При уменьшении момента нагрузки и соответственно, напряжения регулятор скорости 1 меньше значения 0,5 в относительных единицах (точка-Ъ на фиг.2) вновь происходит изменение знака напряжения на выходе интегратора 12, Таким образом, при увеличерии напряжения регулятора скорости рольше значенияЪСфиг. 2) и при уменшении его меньше этого значения обратная связь по разности скоростей двигателей отключается на время, которое необходимо двигателю для перехода зазора.
При изменении знака момента нагрузки fучасток .f-q на фиг,2 устройство работает таким же образом,благдаря симметричной -характеристике, нелинейного элемента 11.
Устройство позволяет тормозному двигателю быстро перейти зазор и взять на себя часть нагрузки при возмущающих воздействиях,больших половины максимально возможных. Это позволяет уменьшить перегрузку ведущего двигателя более равномерно загрузить механические передачи и редукторы и увеличить быстродействие при отработке возмущения.
Формула изобретения
Устройство для управления двухдвигательным электроприводом, содержащее регулятор скорости, блок выбора мертвого хода, два замкнутых контура регулирования тока, объект регулирования и два тахогенератора, соединенные через первый сумматор с одним токовым контуром непосредственно, а с другим - через инвертор, отличаю, щееся тем, что, с целью повышения точности и быстродействия при отработке возмущающих воздействий, в него введены последовательно соединенные нелинейный элемент с зоной нечувствительности и ограничением по верхнему уровню, интегратор, нелинейный элемент с зоной нечувствительности, второй, сумматор, блок выделения мо0дуля, ключевой элемент с зоной нечувствительности и блок перемножения, включенный в рассечку связи на выходе первого сумматора, при этом вход нелинейного элемента с зоной нечувст5вительности и ограничением по верхнему уровню подключен к выходу регулятора скорости, выход нелинейного элемента с зоной нечувствительности соединен с вторым входом интегратора
0 выход которого подключен ко второму входу второго сумматора.
Источники информации, принятые во внимание при экспертизе
1.Frondle, Н.Р. Regelung einer
5 Spiegel3ntenne- Siemens Forschungs i5nd Entwi ck lungsber i chte, т. 4 , 1975, № 2, с. 75-80.
2.Bohm Edgar. FEJhrung und Regelung von Antennenant r i eben fur Satelllten
0 Bodenstatiofren.- Si em ens Leitschrtft 48(1974) Heft,11. c. 828-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| Устройство для управления двухдвигательным электроприводом | 1981 |
|
SU982172A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Двухдвигательный электропривод постоянного тока | 1982 |
|
SU1075360A1 |
| Устройство для управления двумя группами электродвигателей | 1983 |
|
SU1115193A1 |
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Регулируемый электропривод постоян-НОгО TOKA | 1977 |
|
SU817951A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
а
Фи1Л
иг5
