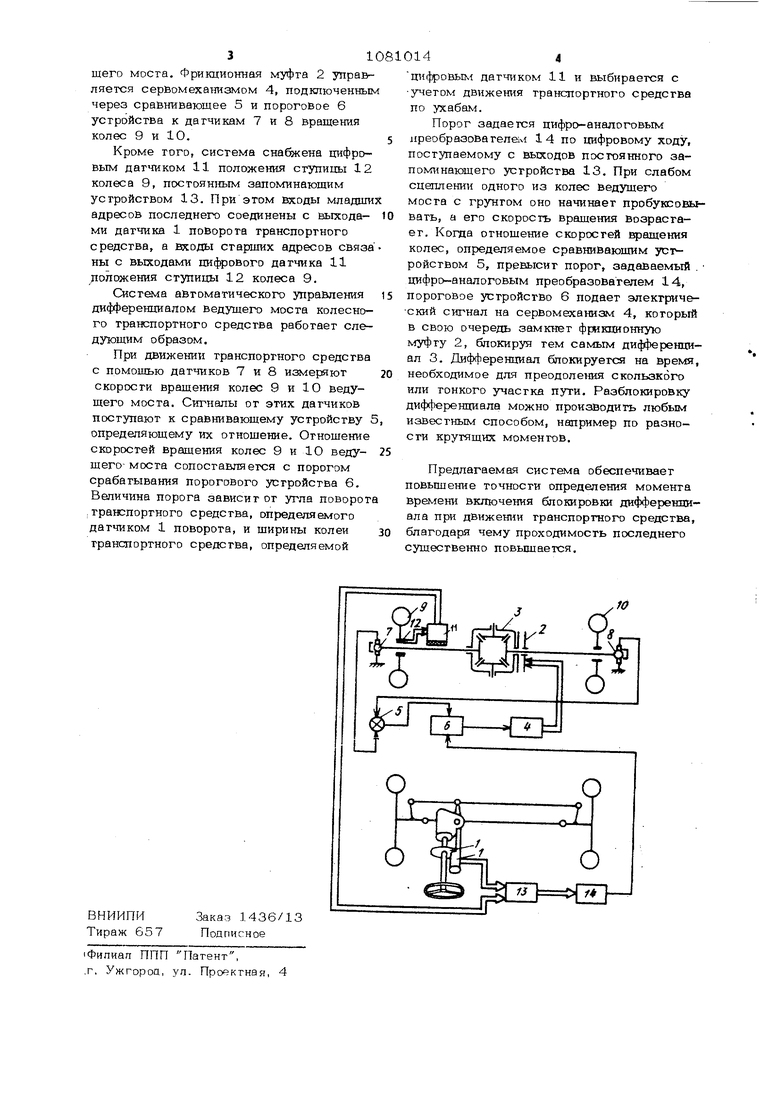
Изобретение относится к В-Вгомобипт: Кому и тракторному машинсютроетшю и касается блокирови межколвсных дафференциапов в трансмиссии транспорт.ньк средств. Известна система автоматической блокировки дифференциала ведущего моста колесной машида., содержащая фризщиОННУ1О муфту, замыкаемут:о cepsoMexamis-MOM, подключенным через сравш ваюшие и пороговые устройства к датчикам скоростей вращения колес, а также к даг--чикам крутящих моментов на них ij . В этой системе момент бпокировии дифференциала определяется по превышеВИЮ разницы скоростей вращения копес над пороговой величиной, которая больше разни1№1 скоростей вращешш колес при повороте транспортного средства. Поэтом при прямолинойн ом движении транспортноГо средства бло1шровке днффере;ьщиала происходит с большим запаздьюанием. Кроме того, система не учитывает изменение ширины колеи транспортного средства. Известна также система авгоматичес кого ттравления дифференциалом Ьедуш.ег моста колесного транспортного средства, содерксашая датчик noBopoiB транспоргного средства, фрикционн то муфту, управляемую сервомеханизмом, подключенньп«1 через сравнивающее и пороговое зстройства к . датчикам скоростей вращения колес 2 . Недостатком известной системы яв.гш-егся то, что на практике она не дозвоягь ет обеспечить необходимую точность оп- ределетш момента времегш В1аоочеш1Я блокировки ди4)фереш шапа. В известной системе коадленсация раз . ности скоростей вращения кола; при пов роте транспортного средства происходит за счет иснояьзования регутшруемых noTeiimioMeTpoB, имеющгос привод от руле вого управления транспортного средства. Однако естественный разброс функш ональ ных характеристик рег -ттруемых потенциометров не может обеспечить дос;тагоч компенсаш1ю иаменешш частот вращ ния колес ведущего моста во Есем диапазоне изменений угла поворота транспор ного средства и привош т к существевньш погрешностям при определении момента блоШ1ровки дифференниапа, С друа- ой стороны, ширина колеи транспортного средства оказывает значительное в-лиятш на радиус поворота транспортного средства, а следовательно и на разность оборото нарулгвоГО и внутреннего колес. В известной системе определению указанной разности обор::)тов кэлес ос щестВ;1яется учета изменения щирины колеи транспортного средства, что приводит к дополнитель сым погрещностям при определении момента времени бло№:роВ1да дифг-еренциала. Целью изобретения является пэвышеш-ie точности определетш момента времени Включения блокировки дифЛ-е рении ал э путем автоматического учета ширины колеи трансшортного средства, Поставленная цель достигает-ск тем, что система аутоматическогэ управления пифл кэренциалом ведущего моста колесного транспортного средства, содержащая датчик поворота транспортного средства, фриЮ-Щонкую -муфту, 5Т1равляемую сервомехзлтазмом, подключешым через сравнивающее и пороговое jiDTpoucTBa к датчикам скоростей вращетш колес, снабжена цифровым датчиком положения стутпты колеса, постоянкьм запомннаюшим ст- ройством, цифро-аналоговым преобразователем, выход которого связан с пороговым устройством, а входы - с выходами ПОСТОЯШ-1ОГО запол-гинающего устройства, при этом одни входы поспеанего соединены с выходами дат1шка поворота транспортного средства, а друтие Входы -с выходами дифроВогэ датчика положения стдоицы колена. Это позволяет при движеш.и транспортного средства обеспечивать своевременность блокировки дифференш1ала„ В этом случае порог срабатьюания системы зависит от угпа поворота и щирины колеи транспортного средства и выбирается с учетом разницы скоростей вращения колес при движении транспортного средства по ухабам. Это достигается путе:м npousHBicH постоянного aanoNfflHa-ющего устройства по алгоритму зависимости отношения скоростей вращения ко,лв:: Ведущего МОСТЕ от угла поворота и колеи транспортного средства с yчeтo движения по ухабам. На чертеже изобра;кена функняональная схема предлагаемой системы автоматического управлешгя дvтффepefщиaлoм ведущего моста колазного транспортного средства. Система содержит датчик 1 поворота гранспортного средства, например ютфровой кодт-Ерующг й преобразоввтель, Фригапюн лу1о мзфту 2, связываюио о водило пифференш-шла 3 с одной из пол;г)сей веду-
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1982 |
|
SU1041328A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| Автоматическая система блокировки дифференциала транспортного средства | 1986 |
|
SU1384429A1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Устройство управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1162630A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
СИСТЕМА АВТаМАТИЧЕСКО ГО УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛОМ ВЕДУЩЕГО МОСТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащая дагчик поворота транспортного средства, фрикционную муфту, управляемую серво механизмом, подключенным через сравнивающее и пороговое устройства к датчикам скоростей вращешш колес, отличающаяся тем, что, с целью повышеш1я точности определения момента времени включения блокировки ш ФФеренциапа путем автоматического учета ширины колеи транспортного средства, она снабжена цифровым датчиком положения ступицы колеса, постоянным запоминающим устройством, цифро- аналоговым преобразователем, выход которого связан с пороговым устройством, а входы выходами постоянного запоминающего (О устройства, при этом одни входы последт него соединены с выходами датчика поворота транспортного средства, другие Входы - с выходами цифрового датчика положения ступицы колеса.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматической блокировки дифференциала ведущего моста колесной машины | 1975 |
|
SU544571A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
