(Л
с
по граничному значению буксования ведущих колес. Устройство дифференциала включает рулевой механизм 1, электропневматический клапан 2, соединенный с силовым цилиндром 3 муфты 4 блокировки дифференциала 5 и с источником 6 давления, два датчика 7 угловых скоростей, связанных с ведущими колесами 8 и электрически связанных с электронным блоком. Электронный блок включает два блока 9 определения величины буксования ведущих колес 8, вычитающее устройство 10, связанное своими входами с датчиками 7 угловых скоростей, устройства. 11 и 12 сравнения, выходы которых связаны с логическим элементом И 13. Один из входов устройства 11 сравнения связан с датчиком 14 поворота рулевого механизма, а второй вход - с выходом вычитающего устройства 10. Входы устройства 12 сравнения соединены с выходами блоков 9 определения величины буксования ведущих колес. Каждый из электронных блоков 9 состоит из устройства 15 умножения, входы которого связаны с датчиком 7 угловой скорости и датчиками 16 вертикальной нагрузки соответствующего колеса 8, вычитающего устройства 17, входы которого связаны с выходом устройства 15 умножения и датчиком 18 действительной скорости, связанным с корпусом заднего моста 19, делительного устройства 20 один из входов которого соединен с выходом вычитающего устройства 17, а второй вход - с выходом устройства 15 умножения. Выходы делительных устройств 20 связаны с входом устройства 12 сравнения, которое снабжено дополнительным входом для задания порогового уровня А, соответствующего предельному значению буксования колес. В качестве датчика 18 действительной скорости может быть использован, например, радарный датчик. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1982 |
|
SU1079483A1 |
| Транспортное средство | 1983 |
|
SU1087375A1 |
| Двухзвенное транспортное средство | 1987 |
|
SU1426864A1 |
| Транспортное средство | 1984 |
|
SU1202915A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОБУКСОВКОЙ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ БЛОКИРОВАНИЯ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2307035C2 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1988 |
|
SU1518154A1 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1194718A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242656C2 |
| ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266448C2 |

Изобретение относится к транспортному машиностроению. Цель изобретения - улучшение тягово-эксплуа- тационных характеристик транспортного средства путем автоматического управления блокировкой дифференциала
1
Изобретение относится к транспортному машиностроению.
Цель изобретения - улучшение тя- гово-эксплуатационных характеристик транспортного средства путем автоматического .управления блокировкой дифференциала по граничному значению буксования ведущих колес.
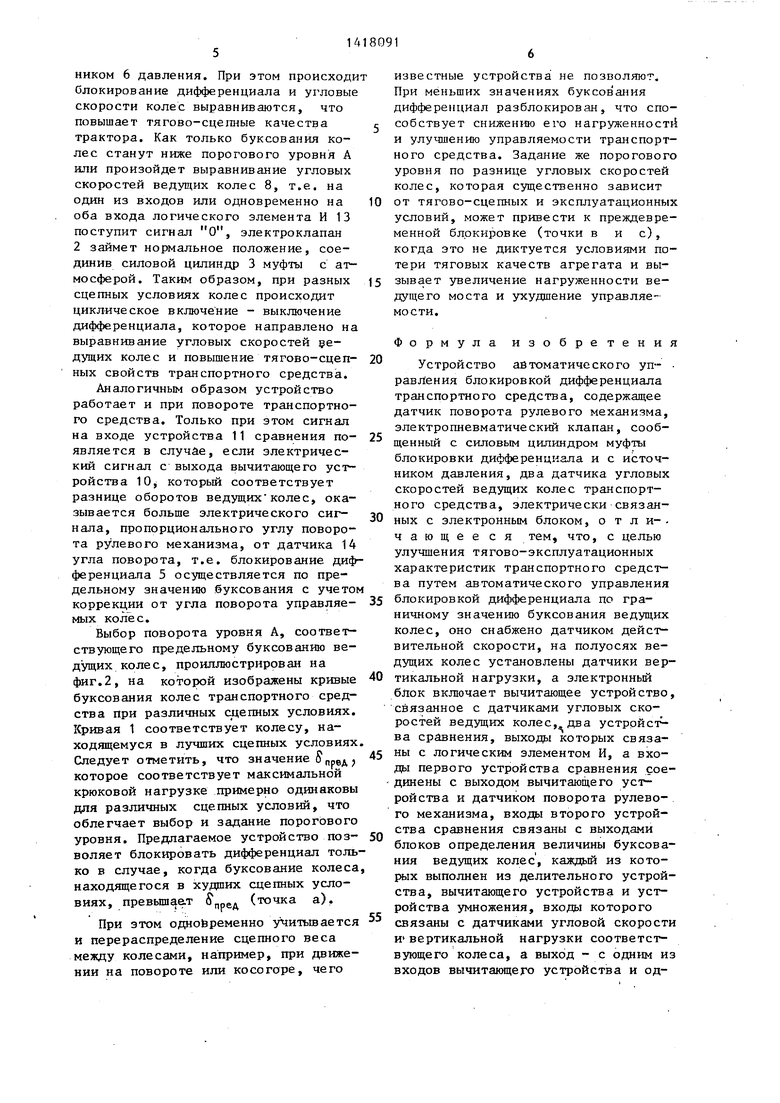
На фиг. 1 показана принципиальная схема устройства автоматического управления блокировкой дифференциала транспортного cpeдcтвa на фиг.2 - кривые буксования для различных сцепных условий. I
Устройство включает в себя рулевой механизм 1, электропневматический клапан 2, соединенный с силовым цилиндром 3 муфты 4 блокировки дифференциала 5 и с источником 6 давления, два датчика 7 угловых скоростей, связанных с ведущими колесами 8 и электрически связанных с электронным блоком. Электронный блок включает два блока 9 определения величи- ны буксования ведущих колес 8, вычи
5
5
0
тающее устройство 10, связанное своими входами с датчиками 7 угловых скоростей, два устройства 11 и 12 сравнения, выходы которых связаны с логическим элементом И 13. Один из входов устройства 11 сравнения связан с датчиком 14 поворота рулевого механизма, а второй вход - с входом вычитающего устройства 10.
Входы устройства 12 сравнения сое- дршены с выходами блоков 9 определения величины буксования ведущих колес. Каждьй из электронных блоков 9 состоит из устройства 15 умножения, входы йоторого связаны с датчиком 7 угловой скорости и датчиками 16 вертикальной нагрузки соответствующего колеса 8, вычитающего устройства 17, входы которого связаны с выходом устройства 15 умножения и датчиком 18 действительной скорости, связанным с корпусом заднего моста 19, делительного устройства 20, один из входов которого соединен с выходом вычитающего устройства 17, а второй вход с выходом устройства 15 умножения, причем выхода делительных устройств 20 связаны с входом устройства 12 сравнения, которое снабжено дополнительным входом для задания порогового уровня А, соответствующего предельному значению буксования колес. В качестве датчика 18 действительной скорости может быть использован, на- npiiMep, радарный датчик.
Устройство работает следующим образом.
При прямолинейной движении транспортного средства электропневматический клапан 2 находится в нормальном положении, при котором соединяет силовой цилиндр 3 муфты 4 с атмосферой. Датчики 7 угловой скорости вы- рабатывают аналоговые электрические сигналы, пропорциональные количеству оборотов ведущих колес 8, которые поступают на входы вычитающего устройства 10. В последнем определяется разность указанных сигналов, соответствующая разнице оборотов ведущих колес 8. Устройство 11 сравнения сравнивает сигналы, поступающие от датчика 14 поворота рулевох о механизма и вычитающего устройства 10. Так как при прямолинейном движении угол поворота рулевого механизма равен нулю, то при наличии разницы угловых скоростей ведущих колес 8 на выходе устройства сравнения появляется сигнал рассогласования, что соответствует логическому сигналу 1, который поступает на один из входов логического элемента И.
Одновременно на входы блоков 9 определения величины буксования ведущих колес поступают сигналь от датчиков 7 угловой скорости, датчиков 16 вертикальной нагрузки ведущих колес и датчика 18 действительной скорости транспортного средства.
Алгоритм функционирования электронных блоков 9 основан на определении буксования ведущих колес по формуле
. .
G);r,
где со; - угловая скорость соответствующего ведущего колеса, rj - кинематический радиус ведущих колес;
Уд - действительная скорость транспортного средства.
Угловая скорость ведущих колес определяется датчиками 7 угловой скорости, кинематический радиус колес изменяется соответственно вертикальной нагрузке, которая измеряется датчиками 16, и, таким образом, велич1ша сигнала от датчиков 16 вертикальной нагрузки может служить аналогом кинематического радиуса колес, действительная скорость транспортного средства измеряется датчиком 18 действительной скорости, который может быть, например, радарным. Работа блоков 9 определения величины буксования ведущих колес осуществляется следующим образом. Устройство 15 умножения производит перемножение сигналов, поступающих от датчи- ков 7 угловой скорости и датчиков 16 вертикальной нагрузки ведущих колес, т.е. на выходе устройства 15 пол уча- ется величина, равная произведению СО,Г; . Вычитающее устройство 17 опре- деляет разность сигналов, поступающих с выхода устройства 15 сравнения и датчика 18 действительной скорости, т.е. величину OJ; г;-Уд. Делительное устройство 20 определяет от- ношение сигналов с выхода вычитающего устройства 15 умножения, т.е. на выходе делительного устройства 20 получается сигнал, являющийся аналогом буксования соответствующего колеса 8.
Сигналы от блоков 9 поступают на входы устройства 12 сравнения. В случае, если буксование одного из колес превысит пороговый уровень А, на выходе устройства 12 сравнения появляется сигнал рассогласования, что соответствует логическому сигналу 1.
Таким образом, при прямолинейном движении при наличии разницы угловых скоростей ведущих колес и увеличении буксования одного из ведущих колес выше порогового уровня, на входы логического элемента И 13 подаются сигналы 1 и 1.
При этом по логическим условиям работы этого элемента на его выходе присутстшует сигнал 1 и на выходе электронного блока появляется элект- рический сигнал рассогласования, который воздействует на электропневматический клапан 2. Последний пере- ходит в положение, при котором он соединяет силовой цилиндр 3 с источ
НИКОМ 6 давления. При этом происходи блокирование дифференциала и угловые скорости колес выравниваются, что повышает тягово-сцепные качества
трактора. Как только буксования колес станут ниже порогового уровня А или произойдет выравнивание угловых скоростей ведущих колес 8, т.е. на один из входов или одновременно на оба входа логического элемента И 13 поступит сигнал О, электроклапан 2 займет нормальное положение, соединив силовой цилиндр 3 муфты с атмосферой. Таким образом, при разных сцепных условиях колес происходит циклическое включение - выключение дифференциала, которое направлено на выравнивание угловых скоростей де- дущих колес и повышение тягово-сцеп- ных свойств транспортного средства.
Аналогичным образом устройство работает и при повороте транспортного средства. Только при этом сигнал на входе устройства 11 сравнения по- является в случае, если электрический сигнал с выхода вычитающего устройства 10 который соответствует разнице оборотов ведущих колес, оказывается больше электрического сиг- нала, пропорционального углу поворота рублевого механизма, от датчика 14 угла поворота, т.е. блокирование диф- ференциапа 5 осуществляется по предельному значению .буксования с учетом коррекции от угла поворота управляе- мых колес.
Выбор поворота уровня А, соответствующего предельному буксованию ведущих колес, проиллюстрирован на фиг.2, на которой изображены кривые буксования колес транспортного средства при различных С1депных условиях. Кривая 1 соответствует колесу, находящемуся в лучших сцепных условиях Следует отметить, что значение „ред которое соответствует максимальной крюковой нагрузке примерно одинаковы для различных сцепных условий, что облегчает выбор и задание порогового уровня. Предлагаемое устройство поз- воляет блокировать дифференциал только в случае, когда буксование колеса находящегося в худших сцепных условиях, превышает 5 „ред (точка а).
При этом одновременно Учитьюается и перераспределение сцепного веса между колесами, например, при движении на повороте или косогоре, чего
известные устройств а не позволяют. При меньших значениях буксования дифференциал разблокирован, что способствует снижению его нагруженностй и улучшению управляемости транспортного средства. Задание же порогового уровня по разнице угловых скоростей колес, которая существенно зависит от тягово-сцепных и эксплуатационных условий, может привести к преждевременной блокировке (точки в и с), когда это не диктуется условиями потери тяговых качеств агрегата и вызывает увеличение нагруженностй ведущего моста и ухудшение управляемости.
Формула изобретения
Устройство автоматического уп- равЛения блокировкой дифференциала транспортного средства, содержащее датчик поворота рулевого механизма, электропневматический клапан, сообщенный с силовым цилиндром муфты блокировки дифференциала и с источником давления, два датчика угловых скоростей ведущих колес транспортного средства, электрически связанных с электронным блоком, о тли-, чающее ся тем, что, с целью улучшения тягово-эксплуатационных характеристик транспортного средства путем автоматического управления блокировкой дифференциала по граничному значению буксования ведущих колес, оно снабжено датчиком действительной скорости, на полуосях ведущих колес установлены датчики вертикальной нагрузки, а электронньй блок включает вычитающее устройство, связанное с датчиками угловых скоростей ведущих колес, два устройств ва сравнения, выходы которых связаны с логическим элементом И, а входы первого устройства сравнения соединены с выходом вычитающего устройства и датчиком поворота рулевого механизма, входы второго устройства сравнения связаны с выходами блоков определения величины буксования ведущих колес, каждый из которых выполнен из делительного устройства, вычитающего устройства и устройства умножения, входы которого связаны с датчиками угловой скорости И вертикальной нагрузки соответствующего колеса, а выход - с одним из входов вычитающего устройства и одним из входов делительного устройства, второй вход вычитающего устройства связан с датчиком действительной скорости, а его выход - с вторым
Составитель С.Белоусько Редактор А.Ворович Техред М.Моргентал Корректор Н.Король
Заказ 4105/15
Тираж 558
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-33, Раушская наб,, д. 4/5
входом делительного устройства, причем выход логического элемента И связан с электромагнитом электропневматического клапана.
фиг 2
Подписное
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
