I Изобретение относится к геофизическому приборостроению и может быть использовано для исследования и калибровки сейсмоприемннков. Изв.естио устройство для калибровки вибродатчиков методом сличения, содержащее, измеритель параметров виброперемещения, чувствительны элемент которого выполнен в виде пьезоэлектрического акселерометра инерционная масса которого перевернута, наложетта па пьезоэлемент и прижата пружиной в центре, а в осно вании и верхней части корпуса преду смотрены резьбовые отверстия для кр крепления эталонного акселерометра к вибратору и калибруемого вибродат чика к эталонному. Погрешность заводской калибровки эталонного аксел рометра не хуже 0,5%, а неравномерность частотной характеристики в диапазоне 0,2-3100 Гц составляет 1% 1 . Однако акселерометр требует калибровки, которая осуществляется не посредственно изготовителем с помощью лазерного интерферометра, являю щегося уникальным устройством что затрудняет проведение необходимой для данного акселерометра периодической калибровки и поверки. Наиболее близким к изобретению является устройство для измерения амплитудно-частотной характеристики сейсмоприемников, содержащее корпус установочную платформу и укрепленные на ней возбудитель гармонически механических колебаний и измеритель параметров колебаний 2 . При этом измеритель параметров колебаний вьшолнен в виде электродинамического сейсмоприемника. В этом устройстве измерение амплитудно-частотной характеристики одного сейсмоприемника осуществляется с помощью аналогичного ему другого сейсмоприемника, амп,питудно-частотную характеристику которого, в свою очередь, необходимо предварительно точно измерить. Отсюда и низкая точность устройства, наименьшая погрешность которого составляет 5%. Цель изобретения - повышение точ ности измерений при одновременном исключении необходимости калибровки измерителя параметров колебаний Поставленная цель достигается тем, что в устройстве для измерения 4 ампл тт дно-част 5тной характе15истики ceiiCMonpneMHHKOB, содержащем корпус, установочную платформу и укрепленные на ней Bosf TOnTCJib гармонических механических колебаний и измергггель параметров колебаний, последний выполнен в виде емкостного датчика, содержащего три статорных цилиндра, соосно расположенных и разделенных равными диэлектрическими промежутками, жестко соедипеиньгх с корпусом устройства, но электрич.ески изолированных от iiero, и два роторньк цили гдра, соосно расположенных и разделеннь х диэлектрической шайбо, которая жестко связана с установочной платформой и имеет толпа-1ну, не меньшую максимальной амшгитуды измеряемых механических колебаний, причем статоркые цилиндры выполнены в виде идентичных круглых металлических цилиндров, роторные цилиндры - в виде идентичных круглых металлических пл линдров, высота которых равна расстоя шго между серединами смежных статорных цилиндров, роторные циливдры электрически изолированы от статорных и расположены внутри них и коаксиально с ними, причем одно основание роторцых и,илиндров, не припегагсщее к диэлектрической шайбе, совпадает с (рй одного из крайних статорньк цилиндров, все цилиндры через коммутатор подключены к преобразователю емкости в цифровой код, выход которого подюточен к блоку арифметические: операпий. На чертеже приведена структу-рная схема устройства. Устройство содержит корпус 1, возбудитель 2 гармонических механических колебаний, установочную платформу 3, подвешенну с при псмош упругих подвесов 4 к корпусу, чувствительный элемент измерителя параметров коле:баний. состоящий из с::аторных цилиндров 5, разделенные; друг от друга и от корпуса диэлектриком 6, л роторных цилиндров 7j раэделениых диэлектрической jaii6oi; 3, жестко связанней стойкой 9 с установочной плp. комм татор 10, с входом которого электрически соедпнеьгы через 11 все ящлиндры чувствительного элемента, а нькод коммутатора соединен с преобразоватЕУем 12 с-:мкос1и 5 Ц1ФРОБОЙ код, выкод кото3рого сосл.ииен с блоком 13 арифметических операций. Устройство работает следуюгдим образом. Измерение амплитуды перемещений установочной платформы осуществляется в четыре такта. В первом такте к преобразователю :12 емкости в цифровой код через коммутатор 10 подключается конденсатор образованный верхними роторным и статорным цилиндрами чувствительного элемента измерителя параметров гармонических механических колебании Код , соответствующий-максимальному значеьшю емкости этого конденсато ра, определяется выражением K,aoiaЛHo i a2(o + (1) где X - амплитуда колебаний установочной платформы, коэфс ициент, учитывающий ошибку нуля, изменение кото рого определяет аддитивную погрешность, коэффициент чувствительности преобразования перемещения платформы, в Ц15ФРОЕОЙ код, изменение которого определяет мультипликативную погрешностьi 02,- коэффициент, учитывающий влияние нелинейности второго порядка, вызванной нелинейностью усилительного канала . Во втором такт.а подключается конденсатор, образованный верхним роторным и средним статорным цилиндрами чувствительного элемента. Код Н,, соответствующий минимальноьгу значению емкости этого конденсатора определяется вьражением г ао аДНо-хНа,(. (г) В третьем такте подключается кондеисатор, образованный нижним роторным и средним статорным цилиндра1 ш чувствительного элемента. Начальная высота его меньше начальной высоты пер вых двух конденсаторов на толщину диэлектрической шайбы, разделяющей роторные цилиндры чувствительного . элемента. Поэтому код H, соответст55. Л вую1 1ий максимальному- эначентгю емкости этого конденсатора, определяется выражением ,а,(,(Ио-й)и-, (3); где i - толщина диэлектрической шайбы. В четвертом такте подключается /конденсатор, образованньй нижними роторным и статорным щлиндраьш чувствительного элемента. Начальная высота его больше началг- ной высоты первых двух конденсаторов на диэлектрической шайбы. Поэтому код N, соответствующий минимальному значению емкости этого конденсатора, определяется выражениеь ,(H,.AVx,a2(H,4uVxf. .(д) при решении системы четырех уровнений (1-4) с четырьмя неизвестными Qg, СЗ, , Og, X относительно X, последний определяется как (-N.) Таким образом, амплитуда колебаний установочной платформы определяется по формуле (5) в блоке 13 арифметических операций, где предварите;-;ьпо запоминаются значения N.,. . . ,N Как видно из выражения (5), точность результата измерения определяется только величиной ii , которая может быть задана практически с любой необходимой для практики точностью. Влияние коэффициентов Од, а, Qg на реэузл тат измерения исключается, что обеспечивает исключение аддитивной к м льтш1ликативной погрешностей, а также погрешностей дрейфа нуля, чувствительности и нелинейности, Положительный эффект изобретения закльэчается в том, что оно обеспечивает высокую точность измерения амплитуды колебаний устаноЕочной платформы и, следовательно, высокую точность измерения амплитудно-частотной . характеристики сейсмоприемников, не требуя при этом специальных устройств и процедур для калибровки встроенного в него измерителя колебйнкй.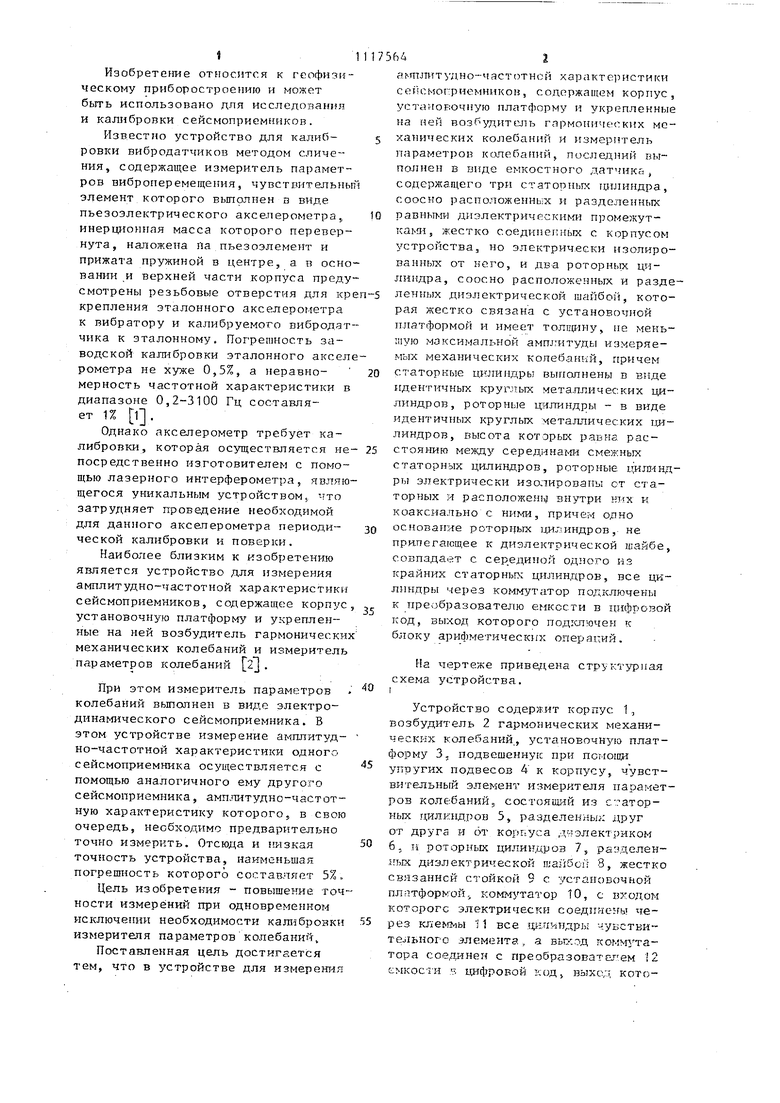
| название | год | авторы | номер документа |
|---|---|---|---|
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| НЕМАГНИТНОЕ ИЗМЕРЕНИЕ АЗИМУТА С ИСПОЛЬЗОВАНИЕМ МЕТ ЭЛЕКТРОХИМИЧЕСКИХ ДАТЧИКОВ | 2010 |
|
RU2539123C2 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| Способ проверки идентичности группы сейсмоприемников | 1981 |
|
SU1022093A1 |
| Автогенераторный измеритель дисперсии диэлектрических свойств полимерных материалов | 1983 |
|
SU1100580A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ СЕЙСМИЧЕСКИХ ДАТЧИКОВ | 2015 |
|
RU2599183C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКИ СЕЙСМОПРИЕМНИКОВ, содержащее корпус, установочную платформу и укрепленные на ней возбудитель гармонических механических колебаний и измеритель параметров колебаний, о т л и ч а ющ е е с я тем, что, с целью повьшения точности измерепня при одновременном исключении необходимости калибровки измерителя параметров колебаний, последний выполнен в виде емI костного датчика , содержащего три статорных цилиндра, соосно расположенных и разделенных равными диэлектрическими промежуткам1-5, жестко соединенных с корпусом устройства, но электрически изолированных от него, и два роторных цилиндра, соосно расположенных и разделенных диэлектрической шайбой, которая жестко связана с установочной платформой и имеет толщину, не меньп1ую максимальной амплитуды измеряемых механических колебаний, причем статорные цилиндры выполнены в виде идентичных.круглых металлических цилиндров, роторные цилиндры - в виде идентичных круглых металлических цилиндров, высота которых равна расстоянию между серединами смежньрс статорных цилиндров, роторные цилиндры электрически изолированы от статорных и расположены внутри них и коаксиально с ними, причем одно основание роторных цилиндров, неприлегающее к диэлектрической шайбе, совпадает с серединой одного из крайних статорных цилиндров, все цилиндры через коммутатор подключены к преобразователю емкости в цифровой код, выход которого подсл ключен к блоку арифметических операО5 ций.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Брюпь и Къер | |||
| Пьезоэлектрические акселерометры и предусилители | |||
| Справочник по теории и эксплуатации | |||
| Себорг, Дания, К.Ларсен и сын, 1978, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Слуцковский А.И | |||
| Сейсморазведочная аппаратура | |||
| М., , 1970, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
