второй элемент ИЛИ подключены к вто- к первому входу данного блока сраврому выходу блока сравнения, а входы- нения.
1117589
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для цифрового следящего привода | 1985 |
|
SU1325412A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1022202A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| Аналого-цифровой преобразователь | 1984 |
|
SU1455391A1 |
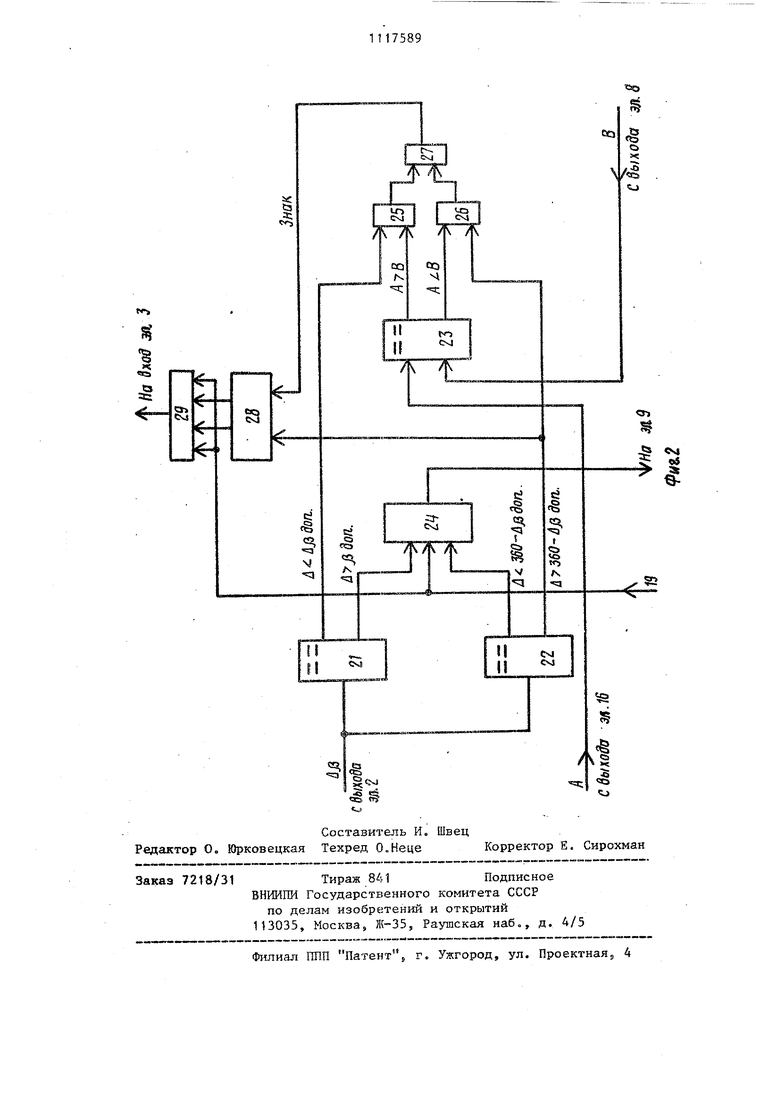
1. УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ ОБЪЕКТА РЕГУЛИРОВАНИЯ, содержащее задатчик расчетного угла, датчик текущего значения угла, выход которого соединен с преобразователем угол - код, подключенным выходом к первому входу первого блока сравнения, а также аналого-цифровой треобразователь, выход которого соединен со следящим приводом, отличающееся тем, что, с целью расширения числа рабочих режимов устройства, в него введены мультиплексор, второй блок сравнения, сумматор, формирователь кода, два блока ключей и задатчик угла коррекции, состоящий из датчика скорости, датчика приращения угла, выходы которых через элемент ИЛИ соединены с первым входом реверсивного счетчика, выход которого подключен через сумматор к первому входу мультиплексй а, выход преобразователя угол - код подключен к первому входу второго блока сравнения и через первый блок ключей к второму входу реверсивного счетчика, третий вход которого соединен с первым входом устройства и первым входом второго блока ключей, выход которого подключен к второму входу сумматора,, а второй вход - к выходу задатчика расчетного угла и второму входу второго блока сравнения, третий вход которого,соединен с вторым входом устройства и с управляющим входом мультиплексора, соединенного выходом через первый блок сравнения с четвертым входом второго блока сравнения и первым входом формирователя , второй вход которого подключен к первому выходу второго блока сравнения, соединенного вторым выходом с вторым входом первого блока ключей, выход формирователя кода соедин-ен с входом аналого-цифрового преобразователя. 2. Устройство по п. 1, отличающееся тем, что второй блок (Л сравнения содержит два элемента И, два элемента ИЛИ, три элемента сравнения, статический регистр и группу элементов И, выход которой является первым выходом данного блока, первые входы соединены с третьим входом блока сравнения, а вторые входы - с выходами статического регистра, вый вход которого через первый элеСП мент ИЛИ подключен к выходам первого 00 и второго элементов И, второй вход ю к первому выходу первого элемента сравнения и первому входу второго элемента И, второй вход которого через второй элемент сравнения подключен к первому входу данного блока сравнения, второй вход второго элемента сравнения является вторым вхоi дом данного блока, а второй выход соединен с первым входом первого элемента И, второй вход которого соединен с первым выходом третьего элемента сравнения, вторые выходы первого и третьего элементов сравнения через
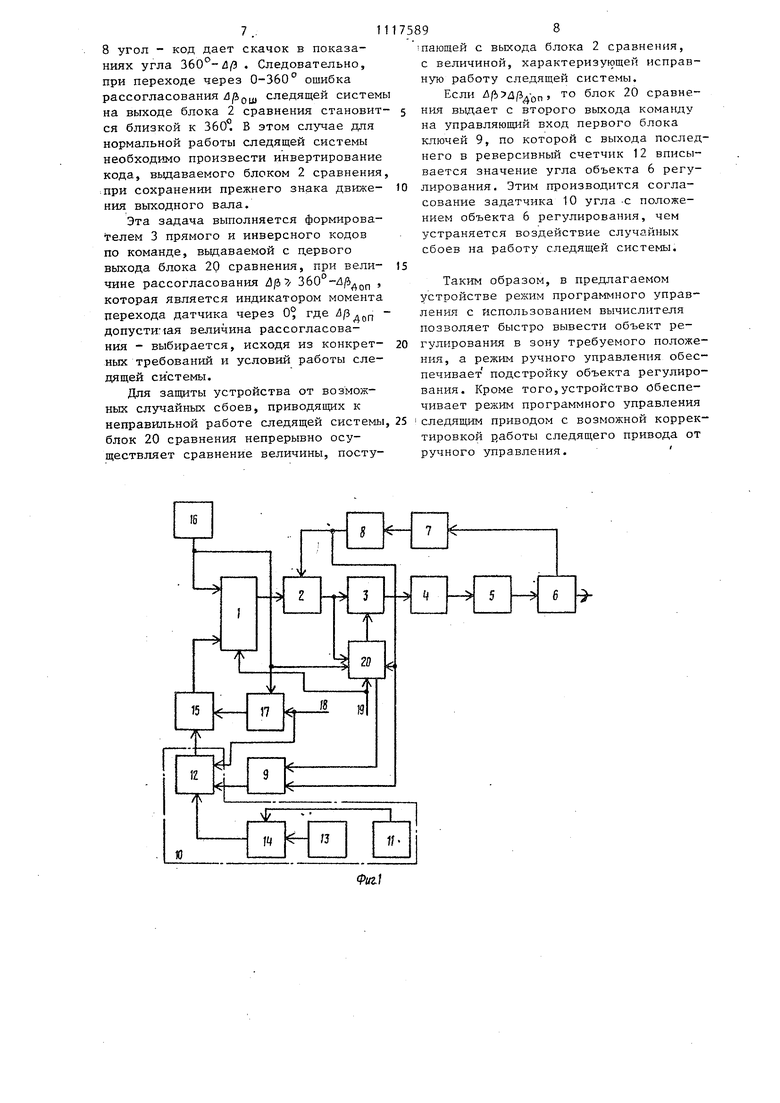
Изобретение относится к автоматике и вычислительной технике и может быть использовано & устройствах управления силовыми приводами, в частности в устройстве управления опорн поворотным механизмом радиотелескопа для вывода его на изучаемый источни радиоизлучения в заданной области полусферы. Известно устройство для программного управления перемещением исполни тельного органа, содержащее последовательно соединенные блок задания программы, реверсивный счетчик, фазо сдвигающий блок, фазовый датчик обратной связи и блок управления двига телем LI . Недостатком устройства является то, что оно работает в программном режиме, тем самым исключает из конту ра управления оператора (в частности нельзя произвести вручную подстройку от штурвала оператором луча антенны радиотелескопа на излучаемый объект и снятие его параметров). Наиболее близким по технической сущности к изобретению является устройство адаптивного управления положением объекта, содержащее вычис литель, последовательно соединенные блок сравнения, аналого-цифровой преобразователь, следящий привод, датчик угла и преобразователь угол код tZ . Однако известное устройство не позволяет оператору в процессе ра боты осуществлять текущую корректировку программы, а также управлять объектом регулирования, имеющего угол поворота выходного вала 360 с преобразователем угол - код с диапазоном изменения угла 0-360°. Целью изобретения является расширение числа рабочих режимов устройства. Поставленная цель достигается тем, что в устройство управления угловым положением объекта регулирования, содержащее задатчик расчетного угла, датчик текущего значения .угла, выход которого соединен с преобразователем угол - код, подключенным выходом к первому входу первого блока сравнения, а также аналого-цифровой преобразователь, выход которого соединен со следящим приводом, введены мультиплексор, второй блок сравнения, сумматор, формирователь кода, два блока ключей и задатчик угла коррекции, состоящий из датчика Скорости,датчика приращения угла, выходы которых через элемент ИЛИ соединены с первым входом реверсивного счетчика, выход которого подключен через сумматор к первому входу мультиплексора, выход преобразователя угол - код подключен к первому входу второго блока сравнения и через первый блок ключей к второму входу реверсивного счетчика, третий вход которого соединен с первым входом . устройства и первым входом второго блока ключей, выход которого подключен к второму входу сумматора, а вто- рой вход - к выходу задатчика расчетного угла и второму входу второго блока сравнения, третий вход которого соединен с вторым входом устройства и с управляющим входом мультиплексора, соединенного выходом через первый блок сравнения с четвертым входом второго блока сравнения и первым входом формирователя кода, второй вход которого подключен к первому выходу второго блока сравнения, соединенного вторым выходом с BTOpbw входом первого блока ключей, выход формирователя кода соединен с входом аналого-цифрового преобразователя. Кроме того, второй блок сравнения содержит два элемента И, два элемента ИЛИ, три элемента сравнения, статический регистр и группу элементов И, выход которой является первым выходом данного блока, первые входы соединены с третьим входом блока сравнения, а вторые входы - с выходами статического регистра, первый вход которого через первый элемент ИЛИ подключен к выходам первого и второ элементов И, второй вход - к первом выходу первого элемента сравнения и первому входу второго элемента И, в рой вход которого через второй эле(мент сравнения подключен к первому входу данного блока сравнения, второй вход второго элемента сравнения является вторым входом данного блока, а второй выход соединен с первы входом первого элемента И, второй вход которого соединен с первым вых дом третьего элемента сравнения, вторые выходы первого и третьего элементов сравнения через второй элемент ИЛИ подключены к второму выходу блока сравнения, а входы - к первому входу данного блока сравнен На фиг.1 представлена структурна схема предлагаемого устройства; на фиг.2 - функциональная схема блока сравнения. Устройство содержит мультиплексо 1, блок 2 сравнения, формирователь 3 кода, аналого-цифровой преобразователь 4, следящий привод 5, объект 6 регулирования, датчик 7 текущего значения угла, преобразователь 8 угол - код, первый блок ключей 9, задатчик 10 угла коррекции, состоящий из датчика 11 приращения угла, реверсивного счетчика 12, датчика 13 скорости и элемента ИЛИ 14, а та же сумматор 15, задатчик 16 расчетного угла, второй блок ключей 17, вход 18 команды коррекции устройств вход 19 управления режимами работы устройства и второй блок 20 сравнения,в Второй блок сравнения содержит три элемента 21-23 сравнения,втор элемент ИЛИ 24, первый и второй эле менты И 25 и 26, первый элемент ИЛИ 27, статический регистр 28 и гр пу элементов И 29. Устройство работа.ет следующим образом. При включении устройства в регис реверсивного счетчика 12 вписывается первоначальное значение углового положения объекта регулирования /j , относительно которого в дальнейшем производится изменение его углового положения с помощью штурвалов py iного управления. Устройство управления угловым положением объекта представляет собой следящую систему,«начальное еос -тояние элементов устройства опреде- ляется значениями кодов, выдаваем 1 ; с задатчика 16, преобразователя 8 угол - код и задатчика угла в соответствии с командами по входам 18 и 19 и принятой в системе обмена тактовой частотой. При отсутствии команды управления на входе 19 устройство работает в режиме программного управления следящим приводом. При этом блок 20 сравнения вырабатывает две логические команды управления. Блок 20 производит сравнение О1Ш1бки рассогласования Л/3, поступающей с блока 2 с допустиNibtM значением Лд,, значением 360°-л/3др в блоках 2 и 20 сравнения (фиг.1). При лр Г360 -Л/3.р,} с выхода элемента 22 сравнения через регистр 28 и группу элементов И 29 в блок 3 выдается команда для формирования на выходе бцока 3 инверсного кода ft. Элемент 23 сравнения совместно с элементами И 25 и 26 и ИЛИ 27 формирует знак рассогласования, который через статический регистр 28 и группу элементов И 29 поступает в блок 3. В случае, если лежит в пределах ДРР Л/3 360°-4Адоп , элементы 21 и 22 вырабатывают команду, которая через элемент ИЛИ 24 выдается на входы блока ключей 9. . Команды с выходов блока 20 выдаются с частотой которой происходит обмен информации , рдр и и ft . Первая команда с первого выхода подключает формирователь 3 прямого и инверсного кодов только для прохождения прямого кода, вторая команда с второго выхода открывает блок ключей 9, тем самым осуществляя запись в реверсивный счетчик 12 задатчика 10 угла текущего значения углового положения объекта 6 регулирования. С выхода задатчика 16 двоичный код jbj поступает на первый вход мультиплексора 1 и далее с его выхода на первый вход блока 2 сравнения, на второй вход которого поступает двоичный код /ЭОР с преобразователя 8 угол - код, соответствующий положению объекта регулирования. С выхода блока 2 сравнения двоичный код угла рассогласования -з/ -Лзал / ор поступает на первый вход блока 20 сравнения и на первый вход формирователя 3 прямого и инверсного кодов, с выхода которого прямой код угла рассогласования поступает на вход 51 аналого-цифрового преобразователя 4, а с его выхода аналоговый сигнал ошибки поступает на следяптй привод 5, осуществляя перемещение объекта 6 регулирования, на котором установлен датчик 7 текущего значения угла и соединенный с нш-i преобразователь 8 угол-код. Код угла /Здр поступает на второй вход блока 2 сравнения в качестве главной обратной связи следящего привода, Одновременно на протяжении выпол1нення програьпуш управления при работе ОТ задатчика 16 с выхода преобразователя 8 угол - код текущее значение положения объекта регулирования записывается 5 реверсивньй счетчиК 12 задатчика 10 угла, тем самым показания реверсивного счетчика 12 соответствуют значению углового поло жен1-1я объекта 6 регулирования, Таким образом, реверсивный счетчик 12 выполняет функцию отслеживания угла объекта 6 управления. Работа устройства в режиме ручног управления следящим приводом осущест ляется следующим образом. Информация с задатчика 10 поступает в статический сумматор 15 и далее с его вь1хода через второй вход мультиплексора 1 поступает на первый вход блока 2 сравнения, В режиме Ручное управление кома да закрывает первый вход мультиплексора 1, через который подается информация с задатчика 16, и открывает второй его вход, через которой подается информация с задатчика 10 через сумматор 15). Команда управления с входа 19 уст ройства поступает на управляющий вхо мультиплексора 1, запрещая прохождение угловой информации от задатчика 16 и разрешая прохождение угловой ин формации с задатчика 10 угла на первый вход блока 2 сравнения« Одновременно с второго -выхода блока 20 срав нения на управляющий вход первого блока ключей 9 подается командаj запрещающая прохождение информации с преобразователя 8 угол - код на задатчик 10 угла. На реверсивном счетчике 12 запоми нается последнее значение углового положения объекта 6 регулирования, Таким образомJ вместо задатчика 16 в контур следящей системы вкл очается задатчик 10 угла к Т1равление объектом 6 регулирования осуществ96ляется с того положения, в котором он находился в момент прихода команды по входу 19. Изменение значения угла задатчика 10 происходит за счет датчиков угла или скорости, или того и другого вместе, управляемых оператором. Реверсивный счетчик 12 суммирует это приращение (с учетом знака) со значением угла, записанным в реверсивный счетчик. Дальнейшая работа следящей системы осуществляется так же, как и в режиме программного управления. При работе в реисиме программного управления следящим приводом с возможной корректировкой работы следящего привода от ручного управления подается команда управления режимами по входу 19, которая переводит устройство в режим ручного управления, и команда корректировки, которая открывает второй блок ключей 17, тем самьш с его вьЕХОда информация от задатчика 16 поступает на второй вход сумматора 15, Одновременно команда корректировки обнуляет реверсивный счетчик 12, с выхода которого нулевая информация поступает на первый вход сумматора 15, где производится ее суммирование с программным значением информации. При необходимости корректировки работы следящего привода оператор вручную вводит значение поправки .по углу или поправки на постоянную скорость в реверсивный счетчик, который накапливает эти изменения угла и передает их на первый вход сумматора, где происходит суммирование с программным значением. Дальнейшая работа устройства осуществляется как и при режиме ручного управления, но программное изменение угла поступает от задатчика 16. В режимах ручного управления и программного управления с возможностью корректировки работы следящего привода от ручного управления в устройстве предусмотрены меры, обеспечивающие нормальную работу следящей системь в обоих режимах управления для объектов регулирования,имеющих угол поворота выходного вала больше 360 (например, азимутальная ось радиотелескопа) и имеющих преобразователь угол код с диапазоном измерения 0-360°. При переходе через 0-360° при малых изменениях угла преобразователь
8 угол - код дает скачок в показаниях угла . Следовательно, при переходе через 0-360° ошибка рассогласования /ioy, следящей системы на выходе блока 2 сравнения становится близкой к 360. В этом случае для нормальной работы следящей системы необходимо произвести инвертирование кода, вьщаваемого блоком 2 сравнения, .при сохранении прежнего знака движения выходного вала.
Эта задача выполняется формирователем 3 прямого и инверсного кодов по команде, выдаваемой с дервого выхода блока 20 сравнения, при величине рассогласования , которая является индикатором момента перехода датчика через 0 где /3 д допустипая величина рассогласования - выбирается, исходя из конкретных требований и условий работы следящей системы.
Для защиты устройства от возможных случайных сбоев, приводящих к неправильной работе следящей системы, блок 20 сравнения непрерывно осуществляет сравнение величины, посту75898
шающей с выхода блока 2 сравнения, с величиной, характеризующей исправную работу следящей системы.
Если Л/Ь Лрлоп блок 20 сравне5 ния вьщает с второго выхода команду на управляющий вход первого блока ключей 9, по которой с выхода последнего в реверсивный счетчик 12 вписывается значение угла объекта 6 регу0 лирования. Этим производится согласование задатчика 10 угла -с положением объекта 6 регулирования, чем устраняется воздействие случайных сбоев на работу следящей системы.
15
Таким образом, в предлагаемом устройстве режим программного управления с Использованием вычислителя позволяет быстро вывести объект регулирования в зону требуемого положения, а режим ручного управления обеспечивает подстройку объекта регулирования. Кроме того,устройство обеспечивает режим программного управления следящим приводом с возможной корректировкой работы следяЕ его привода от ручного управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного управления перемещением исполнительного органа | 1975 |
|
SU532085A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для адаптивного программного управления положением объекта | 1977 |
|
SU622054A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
