132 Изобретение относится к элементам систем с цифровым управлением и предназначено для и-спользования при исследовании, настройке и эксперимен- тальном определении динамических характеристик следящих приводов, а также совместно с устройствами программного управления радиотелескопами для автоматического поиска объекта при его отклонении от программной траектории,
Цель изобретения - расширение класса задаваемых траекторий и обеспечение контроля их выхода из заданной облас- ти.
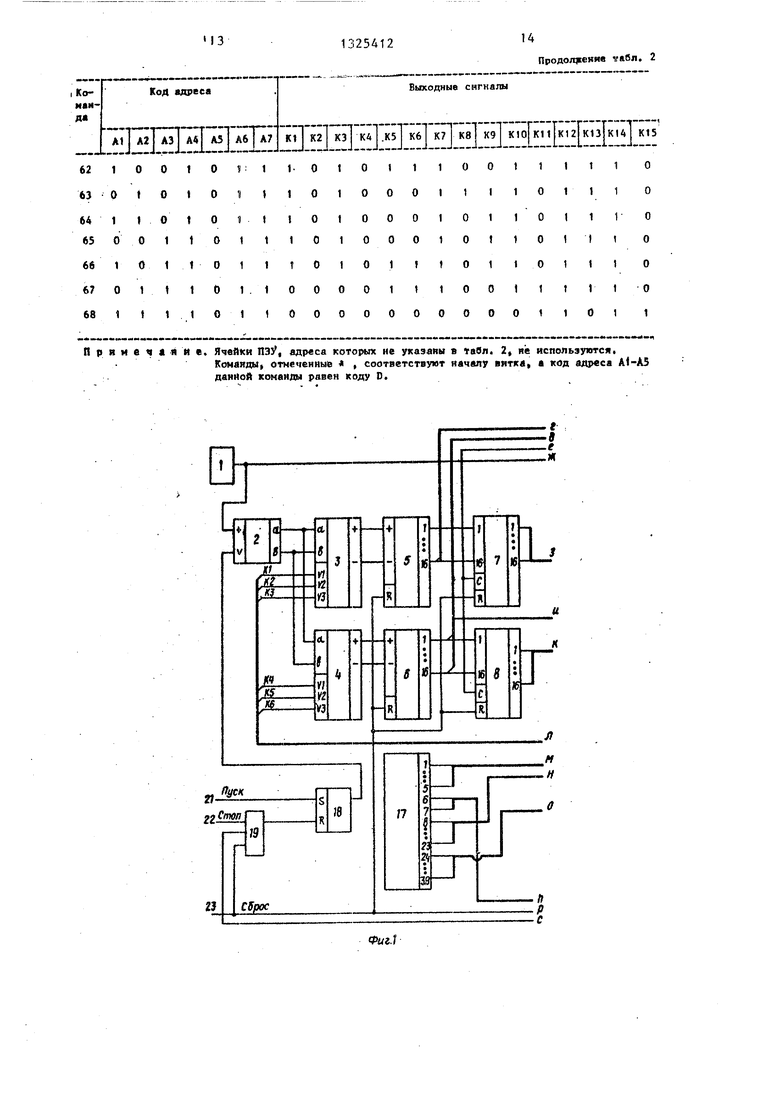
На фиг. 1 и 2 представлена структурная схема устройства; на фиг. 3- 7 - примеры реализации блоков устройтотами f и f. с
ао
частоты в каналы
ства; на фиг. 8-11 - примерные траек тории поиска, реализуемые устройством.
Устройство содержит генератор 1 импульсов, делитель 2 частоты, первый 3 и второй 4 коммутаторы, первый 5 и второй 6 реверсивные счетчики им пульсов, первый 7 и второй 8 регистры, первый 9, второй 10 и третий-11 мультиплексоры, арифметико-логический блок (АЛБ) 12, первый 13, второй 14 и третий 15 элементы И, блок 16 управления, задатчик 17 начальных условий (ЗНУ), триггер 18 управления, элемент ИЛИ 19, элемент НЕ 20, шины Пуск 21, Стоп 22, Сброс 23, выходы 24 и 25 устройства и контрольный выход 26. Блок 16 управления содержит счетчик 27 и постоянное запоминающее устройство (ПЗУ) 28.
Делитель 2 частоты (фиг. 3) содержит элемент И 29 и счетный триггер 30, который делит частоту генератора t импульсов на два. При подаче на вход V нулевого сигнала работы делителя частоты запрещена.
На фиг. 4 приведен пример реализации коммутаторов 3 и 4 на элементах ЗИ-2ИЛИ 31, которые коммутируют импульсные последовательности с час- выхода делителя 2 + или - ревер- сивных счетчиков 5 и 6 импульсов.Если сигналы V и V, нулевые,то коммутатор не пропускает импульсные последовательности -на выход. При единичном сигнале V, на выходе -(- присутствует сигнал с частотой ;„ при , либр с частотой f - при . При единичном сигнале V на
, Q
5
5
0
5
0
0
5
0
5
12/
выходе - присутствует сигнал с частотой fj, при , либо с частотой fj - при УЗ 0.
Задатчик 17 начальных условий (фиг. 5) содержит переключатели 32- .35,1 которые при выключенном состоянии формируют нулевой сигнал, а при вклю-. ченном - единичный. Переключателями 32 устанавливается пятиразрядный двоичный код D для установки блока 16 управления в начальное состояние, переключателями 33 - двухразрядный код управления для выбора нужного вида траектории, а переключателями 34 и 35 - шестнадцатиразрядные двоичные коды параметров h, и h траектории.
Первый 9, второй 10 и третий 11 мультиплексоры выполнены (фиг. 6) на элементах ЗИ-2Ш1И 36, которые в зависимости от состояния сигнала V пропускают шестнадцатиразрядный двоичный код либо с первой, либо с второй групп входов. Если сигнал V, нулевой, то на мультиплексоров ,устанавливается нулевой код.
Арифметико-логический блок 12 (фиг. 7) выполнен на двух группах элементов ИСКЛЮЧАЩЕЕ ИЛИ 37 и 38, двух сумматорах 39 и 40 и элементе ИЛИ-НЕ 41.
При нулевом сигнале V j матор 39 (40) выполняет операцию сложения, при единичном - операцию вычитания. На втором выходе АЛБ () устанавливается единичный сигнал при нулевом коде на выходе сумматора 40, а на первом выходе АЛБ ( ) при отрицательном коде. Операции сложения и вычитания в АЛБ 12 выполняются с числами, представленными дополнительными кодсми, старший шестнадцатый разряд которых знаковьш.В табл.1 представлены значения управляющих сигналов.V, и V и тип выполняемой операции.
Первый 5, второй 6 реверсивные счетчики импульсов, счетчик 27, первый 7 и второй 8 регистры выполнены на триггерах J-K типа, срабатывают щих по заднему фронту входного счетного или стробирующего импульсов.Благодаря этому переходные процессы в коммутаторах 3 и 4, мультиплексорах 9-11, АЛБ 12 и ПЗУ 28 происходят при паузе тактового сигнала и не влияют на работу устройства.
Устройство работает следующим образом.
После подачи питания устройство необходимо установить в исходное состояние подачей сигнала на шину Сброс 23, при этом триггер 18 управления, первый 5 и второй 6 реверсивные счетчики импульсов, счетчик 27, первый 7 и второй 8 регистры устанавливаются в нулевое состояние, а работа делителя 2 частоты запрещается нулевым сигналом с выхода триггера 18 управления. В задатчике 17 начальных условий оператор устанавливает исходные данные, определяющие вид траектории, после чего подается сигнал на шину Пуск 21, устанавливающий триггер 18 управления в единичное состояние. Разрещается работа делителя 2 частоты, на выходе которого появляются импульсные последовательности сигналов, обеспечивающие формирование в первом 5 и второй 6 реверсивных счетчиках импульсов кодов координат X и Y задаваемой траектории, -которые поступают на выходы 24 и 25 устройства. Задаваемая траектория формируется из отрезков прямых. Угол d наклона отрезка к оси X определяется как
d arg tg
f
(K1-K2)CK3-f«+(1-K3) (КА-К5Г К6- о,+(1-К6)в ;
где f,
fi К1
.К6еГО,1 - выходные сигналы блока 16| f д и fg - частоты импульснь1х последовательностей с делителя 2 частоты.
Для представленного устройства fa 2 fft, а о/ может принимать значения О, ±27, ±45, ±63, ±90°.
При формировании очередного отрезка траектории состояние счетчика 27 фиксировано, при этом на выходах ПЗУ 28 устанавливаются сигналы К1 - К14, которые поступая на первый 3 и второй 4 коммутаторы, обеспечивают подачу на первый 5 и второй 6 реверсивные счетчики импульсов частот fg или f, формирующих угол наклона отрезка. Значение кодов в счетчиках по действием входных импульсов нач инает плавно изменяться в сторону увеличения или уменьшения. АЛБ 12 под действием управляющих сигналов К7 и К8 настраивается на выполнение одной из
операций согласно табл. 1., а сигналы К9 - К14 подключают на его входы нужные операнды. При равенстве нулю результата арифметических действий в АЛБ 12 на его втором выходе появляется единичный сигнал,являющийся признаком окончания формирования данного отрезка траектории ТактовьпЧ импульс генератора 1 импульсов, проходя через второй элемент И 14, переключает счетчик 27 в следующее состояние, на выходе ПЗУ 28 появляются новые значения сигналов К1 - К 14, настраиваю- .
5 щих блоки устройства на выполнение операций по формированию следующего отрезка траектории.
Первые D отоезков тоаектЬоии поел- назначены для формирования начальноQ го участка траектории и вывод ее в начальную точку первого витка. Затем начинается формирование витков траектории, под которыми понимаются участки траектории, требующие повторяющих5 ся действий. После окончания витка траектории сигнал К15 на выходе ПЗУ 28 принимает единичное значение, при этом запрещается работа второго элемента И 14 и разрешается работа первого 13 и третьего 15 элементов И. Сигналы К1 - Кб устанавливаются нулевые, благодаря чему импульсы на счетные входы первого 5 и второго 6 реверсивных счетчиков импульсов не подаются. Сигналы К7 - К14 устанавливаются такими, чтобы АЛБ 12 осуществлял сравнение кодов первого 5 или второго 6 реверсивных счетчиков импульсов с границей заданной области, подаваемой в ввде одного из па0
5.
0
5
0
5
раметров h или hj. Если код I X I или IYI вьш1ел из заданной области, то на первом выходе 7 АЛБ 12 устанавливается единичный сигнал, разрешающий работу первого элемента И 13. Тактовый импульс, проходя через первый элемент И 13, поступает на контрольный выход 26 устройства и через элемент ИЛИ 19 - на нулевой вход триггера 18 управления, устанавливая его в нулевое состояние. Нулевой сигнал с выхода триггера 18 управления запрещает работу делителя 2 частоты, останавливая при этом работу устройства.
Если коды IX I или IY 1 не вьшши из заданной области, то на первом выходе 7 АЛБ 12 нулевой сигнал и работа первого элемента И 13 запрещена.
Тактовый импульс, проходя через третий элемент И 15, устанавливает, в счетчике 27 код D начальной точки ил начала витка, на выходе ПЗУ 28 устанавливаются сигналы К1 - К14, обеспечивающие формирование первого отрезка следующего витка траектории. Формирование витков траектории осуществляется до тех пор, пока коды I X 1. или I Y 1 не выйдут из заданной области.
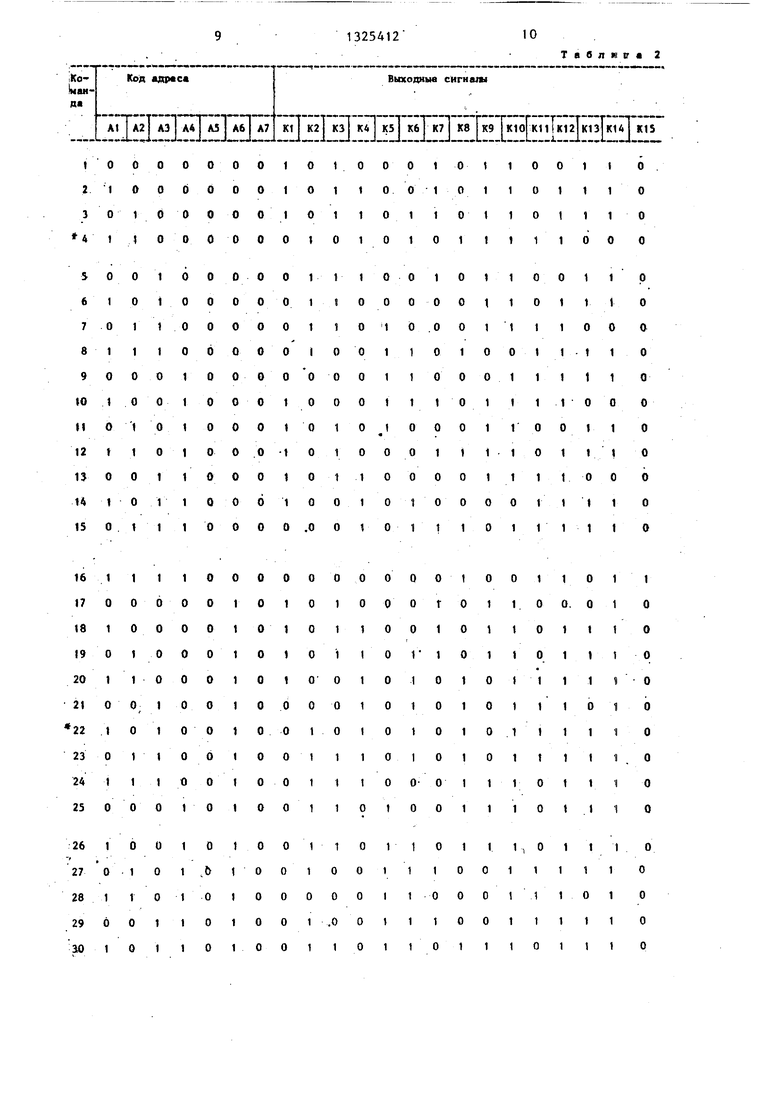
С помощью отрезков прямых, которыми задается траектория, может быть аппроксимирована практически любая траектория поиска, например спираль, растр, сектор, и другие.. В общем случае траектория может не содержать витков и иметь произвольную конфигурацию. На фиг. 8-11 представлены четыре варианта траекторий, для которых в табл. 2 даны программы, записанные в ПЗУ 28.
На фиг. 8 представлена траектория близкая к круговой спирали со сглаженными углами, а на фиг. 9 - траектория в виде растра со сглаженными углами. Начальные участки траекторий на фиг. 8 и 9 сформированы так, чтобы не было резких изгибов, что приводит к сокращению пути при обзоре заданной области и к уменьшению динамических ударов на привод в точках изгиба траектории.
На фиг. 10 и 11 представлены траектории в виде пирамидальных растров., размещенных по осям Y и X. В табл. 2 дана таблица программирования ПЗУ 28. Команды 1-16 предназначены для формирования траектории типа спираль (фиг. 8), команды 17- 36 - для формирования траектории типа растр (фиг. 9), команды 37-52 и 53-68 для формирования траекторий типа пирамидальный растр (фиг. 10 и 11). Каждому линейному участку траектории на фиг. 8-11 соответствует одна строка табл. 2, Число.команд для формирования одного типа траектории не большое (от 16 до 20),
При использовании данного устройства совместно с программным устройством для поиска объекта вид траектории на фиг.8 целесообразно использовать при равновероятном нахождении объекта в заданной области,вид траектории на фиг. 9 - при наибольшей вероятности нахождения объекта в центре заданной области, а траектории на фиг. 10 и 11 - при известном направлении смещения объекта от программной траектории.
Число параметров h и выходных частот f делителя 2 может быть любым (в конкретном устройстве взято число параметров и частот, равное двум), при этом точность аппроксимации требуемой траектории отрезками может быть
сколь угодно высокой.
Таким образом, в устройстве благодаря вводу дополнительных элементов и связей расширен класс задаваемых траекторий, что приводит к более эффективному использованию устройства .для поиска объекта при его отклонении от программной траектории, в частности к уменьшению времени поиска, Исключение резких изгибов траектории приводит к уменьшению динамических нагрузок на привод. Кроме того, в устройстве обеспечивается контроль выхода траектории поиска из заданной области, что также приводит к экономии времени поиска.
Формула изобретения
1. Задающее устройство для цифрового следящего привода, содержащее генератор импульсов, делитель частоты, первый и второй коммутаторы,
первый и второй реверсивные счетчики импульсов, арифметико-логический блок, блок управления, задатчик на- чальных условий, триггер управления и шины Пуск, Стоп, Сброс, причем шина Пуск соединена с единичным входом триггера управления, выход которого соединен с управляющим входом делителя частоты, счетный вход которого соединен с выходом генератора импульсов, а выходы -,с информационными входами первого и второго коммутаторов,, выходы которых соединены со счетными входами соответственно первого и второго реверсивных
счетчиков импульсов, выходы которых являются выходами устройства, при этом шина Сброс соединена со сбросовыми входами первого, второго реверсивных счетчиков импульсоВу и блока управления, первая, вторая и третья группы выходов которого соединены с управляющими входами соответственно первого, второго коммутаторов и арифметико-логического блока, отличающееся
что, с целью расширения класса задаваемых траекторий и обеспечения контроля их выхода из заданной области, в устройство введены первьй и второй регистры, первый, второй и третий мультиплексоры, первый, второй и третий элементы И, элемент ИЛИ и элемент НЕ, причем выходы первого реверсивного счетчика импульсов соединены с первой группой входов первого мультиплексора и через первьй регистр - с второй группой входов второго мультиплексора, а выходы второго реверсивного счетчика импульсов соединены с первой группой входов второго мультиплексора и через второй регистр - с второй группой входов первого мультиплексора, выходы первого, второго и третьего мультиплексоров соединены с входами арифметико-логического блока, а управляющие входы соответственно с четвертой, пятой и шестой группами выходов блока управления, седьмой выход которого соединен с первыми входами первого, третьего элементов И и через элемент НЕ - с первым входом второго элемента И,вторые входы первого, второго и третьего .элементов И соединены с выходом генератора импульсов, а третьи входы первого и второго элементов И соединены соответственно с первым и вторым выходами арифметико-логического блока, причем выход первого элемента И соединен с контрольным выходом устройства и через элемент ИЛИ - с нулевым входом триггера управления, выход второго элемента- И соединен со счетным входом блока управления и стробирующими входами первого и второго регистров, а выход третьего элемента И - со стробируклцим входом блоfO
1325412 8
тем, ка управления, соединенного установочными и управляющими входами соответственно с первой и второй группами выходов задатчика начальных условий, третья и четвертая группы выходов которых соединены с первой и второй группами входов третьего мультиплексора, при этом шина Стоп соединена с вторым входом элемента ИЛИ, а шина Сброс - с третьим входом элемента ИЛИ и сбросовыми входами первого и второго регистров..
2, Устройство по Пг 1, о т л и -. чающееся тем, что блок управления содержит счетчик и постоянное запоминающее устройство младшие разряды адресных входов которого соедине.ны.с выходами счетчика, старшие разряды адресных входов являются управляющими входами блока управления, а выходы - выходами блока управления, причем счетный вход, установочные входы, стробирующий вход и сбросовый вход счетчика являются соответственно счетным входом, установочными входами, стробирующим входом и сбросовым входом блока управ15
20
25
ления.
Таблица
ш:
Тип операции
35
40
ления.
Таблица
ш:
Тип операции
Таблмга 2
n р и и е ч а Я и е. Ячейки ПЭУ, адреса которых не указаны в табл. 2, иё используются.
КомяидЫ| отмеченные t , соответствуют началу вятка, а код адреса A1-AS дамной команды равен коду D.
Продол кеяие чабл. 2
а
31
YZ
5
УЗ
Ф1Л.З
Фиг.
Ф«.5
Фиг. 6
Фиг.7
ft- 5 Iff
О
.8
iput.3

| название | год | авторы | номер документа |
|---|---|---|---|
| Ячейка однородной вычислительной среды | 1986 |
|
SU1443000A1 |
| Устройство для отображения информации | 1987 |
|
SU1476523A1 |
| Устройство для регистрации информации | 1984 |
|
SU1234858A1 |
| Дельта-кодер | 1986 |
|
SU1381716A1 |
| Цифровой термометр | 1984 |
|
SU1229598A1 |
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Дельта-кодек | 1989 |
|
SU1725398A1 |
| Задающее устройство для цифрового следящего привода | 1986 |
|
SU1411709A1 |
| Дельта-кодер | 1984 |
|
SU1197088A1 |
| Сумматор-вычитатель частотно-импульсных сигналов | 1991 |
|
SU1807483A1 |



Изобретение относится к элементам систем с цифровым управлением и предназначено для использования при исследовании, настройке и экспериментальном определении динамических характеристик следящих приводов, а также совместно с устройствами программного управления радиотелескопами для автоматического поиска объекта при его отклонении от программной траектории. Целью изобретения является расширение класса задаваемых траекторий и обеспечение контроля их выхода из заданной области. Задающее устройство содержит генератор импульсов, делитель частоты, первый и второй коммутаторы, первый и второй реверсивные счетчики импульсов, neip- вый и второй регистры, три мультиплексора, арифметико-логический блок, три элемента И, блок управления, состоящий из счетчика и постоянного запоминающего устройства, задатчик начальных условий, триггер управления, элементы ИЛИ и НЕ, шины Пуск,Стоп , Сброс. В предложенном задающем уст- рюйстве благодаря вводу дополнительных элементов и связей расширен класс задаваемых траекторий, что .приводит к более эффективному использованию устройства для поиска объекта при его отклонении от программной траектории, в частности к уменьшению времени поиска. С помощью отрезков прямых, которыми задается траектория, может быть аппроксимирована практически любая траектория поиска, например спираль, растр, сектор и другие,при этом точность аппроксимации может быть сколь угодно высокой, в общем случае траектория может не содержать витков и иметь произвольную конфигурацию. Кроме того, в устройстве обеспечивается контроль выхода траектории поиска из заданной области, что также приводит к экономии времени поиска. 1 з.п. ф-лы, 11 ил., 2 табл. 1C
Фиг.Ю
Фиг.П
Составитель А.Аникин Редактор Е.Папп Техред Л.Сердюкова Корректор Л.Патай
Заказ 3106/41Тираж 863 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Жт-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
| Задающее устройство для цифрового следящего привода | 1978 |
|
SU686018A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Задающее устройство для цифрового следящего привода | 1983 |
|
SU1144088A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
