1
Изобретение относится « автоматике и вычислительной техлике и может быть иопользоваио при разработке «олтурных устройств програм мйого управления стайками и машииами, «езаеисимо от привода пополяительного органа при циклических нагрузках.
Известно устройство для программного управления перемещением, содержащее блок ввода nponpaiMMbi и датчик перемещений, подключенные через блок сравнения к шаговому двигателю 1. Это устройство характеризуется сложностью и недостаточными надежностью и точностью управления. На-иболее близким техническим рещением к изобретению является устройство для программного управления перемещением исполнительного органа, содержащее последователыно соединенные блок задания программы, реверсивный счетчик, фазосдвигающий блок, подключенный к источнику опорного напряжения, фазовый датчик обратной связи, блок управления двигателем, подключенный через двигатель, связанный с фазовым датчиком обратной связи, к исполнительному органу, элемент «ИЛИ, нодключенный IK блоку задания программы и реверсИВному 1счетчику, суММирующий счетчик и элемент «И, .связанный ;с блоком задания нрогра:ммы 2. Этому известному устройству присуща низкая точность. Описываемое устройство является развитием известного, защищенного основным авт. св. 490082, и отличается от него тем. что в него, с целью повыщения точности управления, введен блок выбора величины шага перемещения, вход которого подключен к выходу блока задания програ.ммы, а выход - ко входам фазосдвигающего блока и реверсивного счетчика.
На чертеже представлена схема описываемого устроЙ1ства.
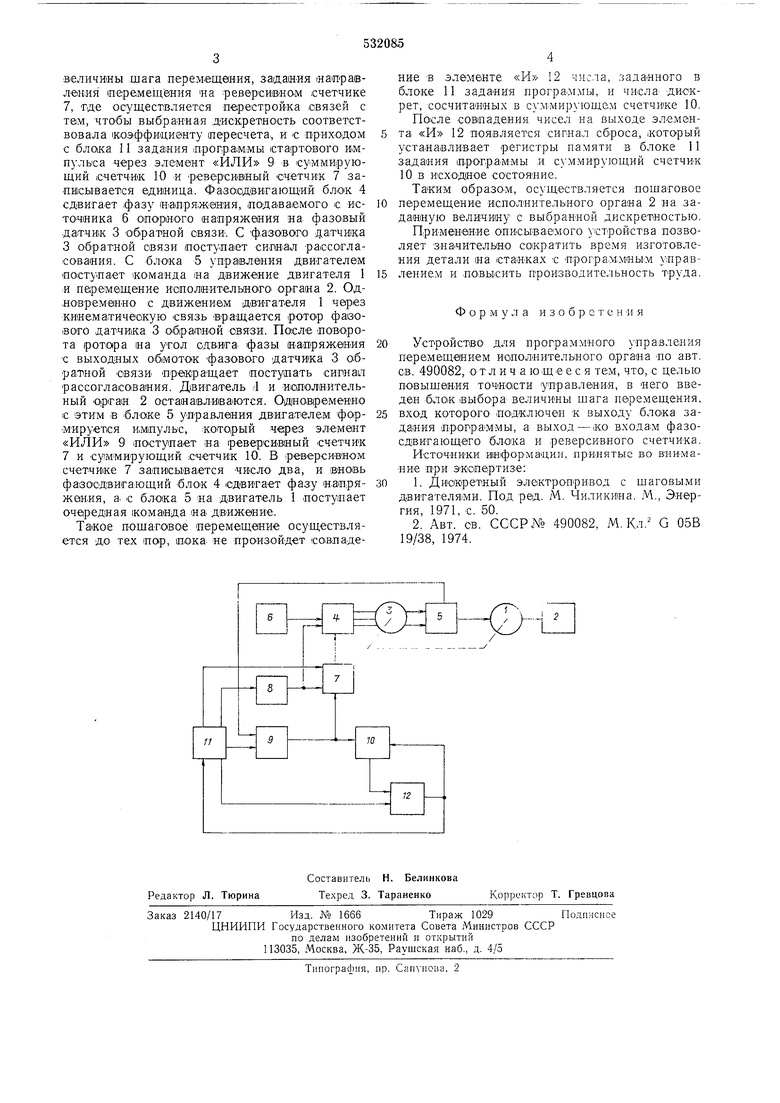
Оно содержит двигатель 1, воздействующий на исполнительный орган 2 и кинематически .соединенный с фазовым датчиком 3 обратной связи, соединенным с фазосдвигающпм блоком 4 и блокОМ 5 управления двигателем. Фазосдвигающий блок 4 соединен с источником 6 опорного напряжения, реверсивньгм счетчиком 7 и блоком 8 выбора величины шага перемещения. Кроме того, реверсивный счетчик 7 соединен с элементом «ИЛИ 9, суммирующим
счетчиком 10 и блоком 11 задания програ.ммы, который двусторонними связями соединен с элементом «И 12.
В исходном состоянии с фазового датчика 3 обратной на двигатель 1 через блок 5
управления двигателем не поступает команды управления, поэтом} двигатель 1 и исполнительный орган 2-неподвижны. После задания величины перемещения с блока 11 задания программы на элемент «И 12. задания
.величины шага перемещения в блоке 8 выбора
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления перемещением исполнительного органа | 1974 |
|
SU490082A1 |
| Устройство для программного управления | 1976 |
|
SU566241A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| ГИДРАВЛИЧЕСКАЯ ПОЗИЦИОННАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU393486A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДОМ | 1979 |
|
SU826284A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Устройство для позиционного управления | 1983 |
|
SU1124257A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU750438A1 |
