fonn
I
L
С /J 7
1/рин 2
СО СО
со
00
00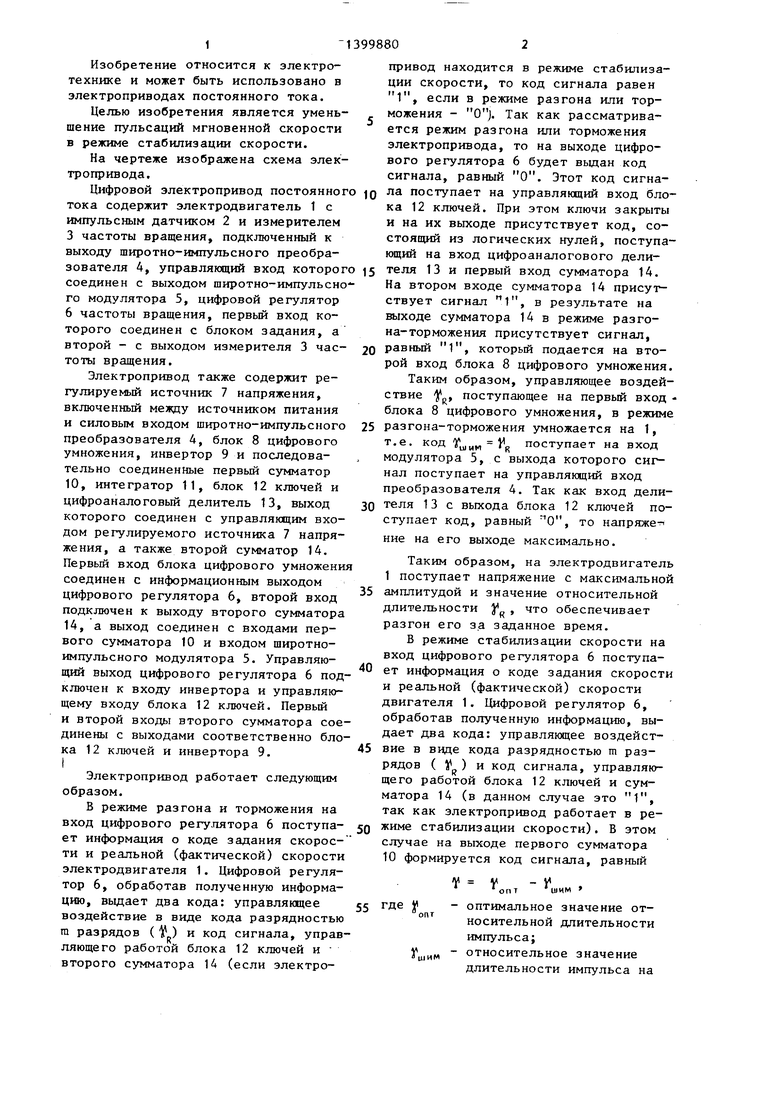
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Устройство для регулирования частоты вращения электродвигателя | 1979 |
|
SU900390A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| Электропривод | 1988 |
|
SU1656652A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
Изобретение относится к электротехнике и может быть испольэовано для управления электродвигателями постоянного тока. Целью изобретения явля- ется уменьшение пульсаций мгновенной скорости в режиме стабилизации скорости. Устройство содержит последовательно соединенные сумматор 10, интегратор 11 и блок 12 ключей, выход которого подключен к входам цифро- аналогового преобразователя 13 и сумматора 14. Выход цифрового регулятора 6 подключен к входам блока 12 ключей, инвертора 9 и блока 8 цифрового умножения. В данном устройстве в режиме стабилизации скорости уменьшение амплитуды пульсации тока якоря, а следовательно , и скорости электродвигателя обеспечивается снижением напряжения питания преобразователя при одновременном увеличении скважности. 1 ил. (Л
J 2
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Целью изобретения является уменьшение пульсаций мгновенной скорости в режиме стабилизации скорости.
На чертеже изображена схема электропривода.
Цифровой электропривод постоянного Q поступает на управляющий вход блотока содержит электродвигатель 1 с импульсным датчиком 2 и измерителем 3 частоты вращения, подключенный к выходу широтно-импульсного преобразователя 4, управляющий вход которого 15 теля 13 и первый вход сумматора 14.
соединен с выходом широтно-импульсно го модулятора 5, цифровой регулятор 6 частоты вращения, первый вход которого соединен с блоком задания, а второй - с выходом измерителя 3 частоты вращения.
Электропривод также содержит регулируемый источник 7 напряжения, включенньШ между источником питания и силовым входом широтно-импульсного преобразователя 4, блок 8 цифрового умножения, инвертор 9 и последовательно соединенные первый сумматор 10, интегратор 11, блок 12 ключей и цифроаналоговый делитель 13, выход которого соединен с управляющим входом регулируемого источника 7 напряжения, а также второй сумматор 14. Первый вход блока цифрового умножения соединен с информационным выходом цифрового регулятора 6, второй вход подключен к выходу второго сумматора 14, а выход соединен с входами первого сумматора 10 и входом щиротно- импульсного модулятора 5. Управляющий выход цифрового регулятора 6 подключен к входу инвертора и управляющему входу блока 12 ключей. Первый и второй входы второго сумматора соединены с выходами соответственно блока 12 ключей и инвертора 9. I
Электропривод работает следующим
образом.
В режиме разгона и торможения на вход цифрового регу-пятора 6 поступает информация о коде задания скороети и реальной (фактической) скорости электродвигателя 1. Цифровой регулятор 6, обработав полученную информацию, вьщает два кода: управляющее воздействие в виде кода разрядностью m разрядов (V) и код сигнала, управляющего работой блока 12 ключей и второго сумматора 14 (если электропривод находится в режиме стабилизации скорости, то код сигнала равен 1, если в режиме разгона или торможения - . Так как рассматривается режим разгона или торможения электропривода, то на выходе цифрового регулятора 6 будет выдан код сигнала, равный О. Этот код сигнака 12 ключей. При этом ключи закрыты и на их выходе присутствует код, состоящий из логических нулей, поступающий на вход цифроаналогового делиНа втором входе сумматора 14 присутствует сигнал 1, в результате на выходе сумматора 14 в режиме разгона-торможения присутствует сигнал,
равный 1, который подается на второй вход блока 8 цифрового умножения. Таким образом, управляющее воздействие („, поступающее на первый вход - блока 8 цифрового умножения, в режиме
разгона-торможения умножается на 1, т.е. код УШИМ . поступает на вход модулятора 5, с выхода которого сигнал поступает на управляющий вход преобразователя 4. Так как вход делителя 13 с выхода блока 12 ключей поступает код, равный 0, то напряже
ние на его выходе максимально.
Таким образом, на электродвигатель поступает напряжение с максимальной
1
амплитудой и значение относительной длительности У , что обеспечивает разгон его за заданное время.
В режиме стабилизации скорости на вход цифрового регулятора 6 поступает информация о коде задания скорости и реальной (фактической) скорости двигателя 1. Цифровой регулятор 6, обработав полученную информацию, выдает два кода: управляющее воздействие в виде кода разрядностью m разрядов ( У ) и код сигнала, управляющего работой блока 12 ключей и сумматора 14 (в данном случае это 1, так как электропривод работает в режиме стабилизации скорости). В этом случае на выходе первого сумматора 10 формируется код сигнала, равный
V Y - V
лп Т II
5 где у
опт
I шим
оптшим
оптимальное значение относительной длительности импульса;
относительное значение длительности импульса на
выходе цифрового умножителя 8.
С. выхода интегратора 1 1 сигнал
Т
к ydt поступает через открытые клU
I о
чи блока 12 на первый вход сумматора 14 и вход делителя 13. Поскольку на второй вход сумматора 14 поступает код, равный О, на его выходе присутствует сигнал, равный К, поступающий на вход блока 8 цифрового умножения. На выходе блока 8 формируется код V „„ - о На выходе делителя 13 формируется сигнал, пропорциональный 1/К. В результате UC/K, На выходе широтно-импульсного преобразователя 4 формируется сигнал
и
Г, К
Uo
с ,
т.е. закон упбах Л к равления остается постоянным в режимах разгона-торможения и стабилизации скорости.
Таким образом, в режиме стабилизации скорости уменьшение амплитуды пульсации тока якоря, а следовательно и скорости двигателя обсепечивается снижением напряжения питания преобра- зователя при одновременном увеличении скважности.
Формула изобретения
Цифровой электропривод постоянного тока, содержащий электродвигатель с
10
15
0
25
о
35
импульсным датчиком и измерителем частоты вращения, якорная обмотка электродвигателя подключена к выходу ширтэтно-импульсного преобразователя, управляющий вход которого соединен с выходом широтно-импульсного модулятора, цифровой регулятор частоты вращения, первый вход которого соединен с выходом блока задания, а второй соединен с выходом измерителя частоты вращения, отличающийся тем, что, с целью уменьшения пульсаций мгновенной скорости в режиме стабилизации скорости, в него введены регулируемый источник напряжения, включенный между источником питания и силовым входом ши- рот но-импульс но го преобразователя, последовательно соединенные первый сумматор, интегратор, блок ключей и цифро- аналоговьм делитель, выход которого соединен с управляюгцим входом регулируемого источника напряжения, инвертор, второй сумматор и блок цифрового умножения, первый вход которого соединен с информационным выходом цифрового регулятора, второй вход подключен к выходу второго сумматора, а выход соединен с входами первого сумматора и широтно-импульсного модулятора, упг равляющий выход цифрового регулятора подключен к входу инвертора и управляющему входу блока ключей, первый и второй входы второго сумматора соединены с выходами соответственно блока ключей и инвертора.
| Патент ФРГ № 3110937, ; кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1117809A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
