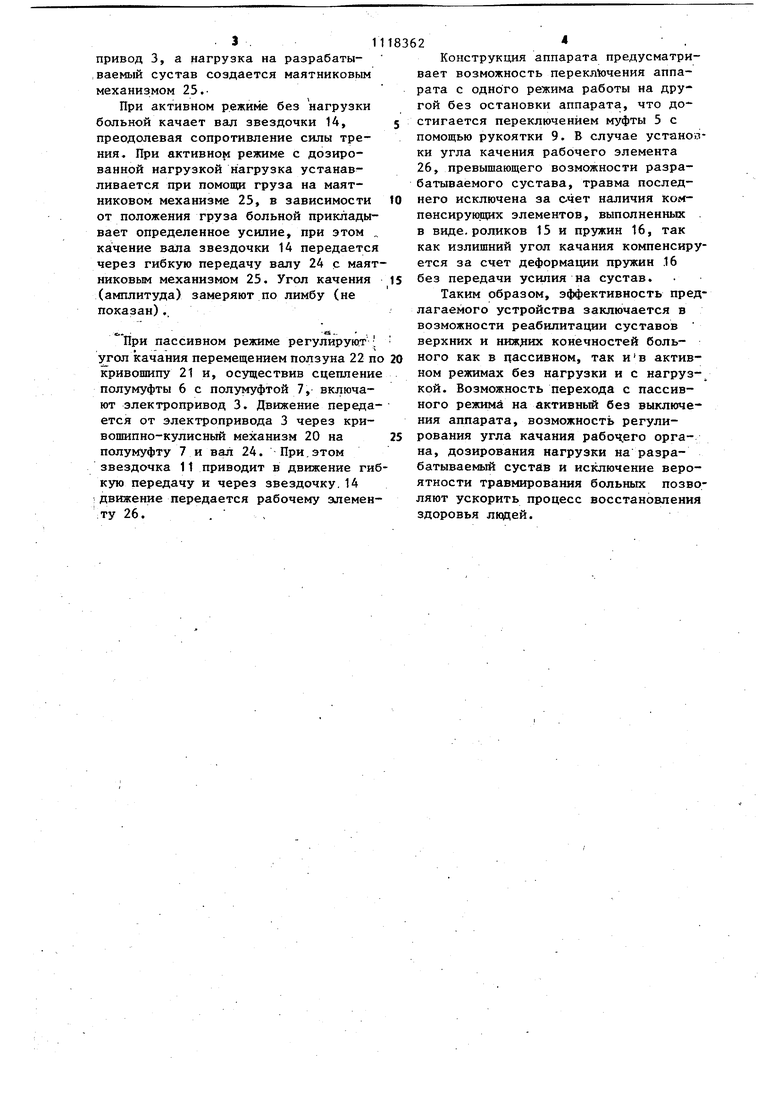
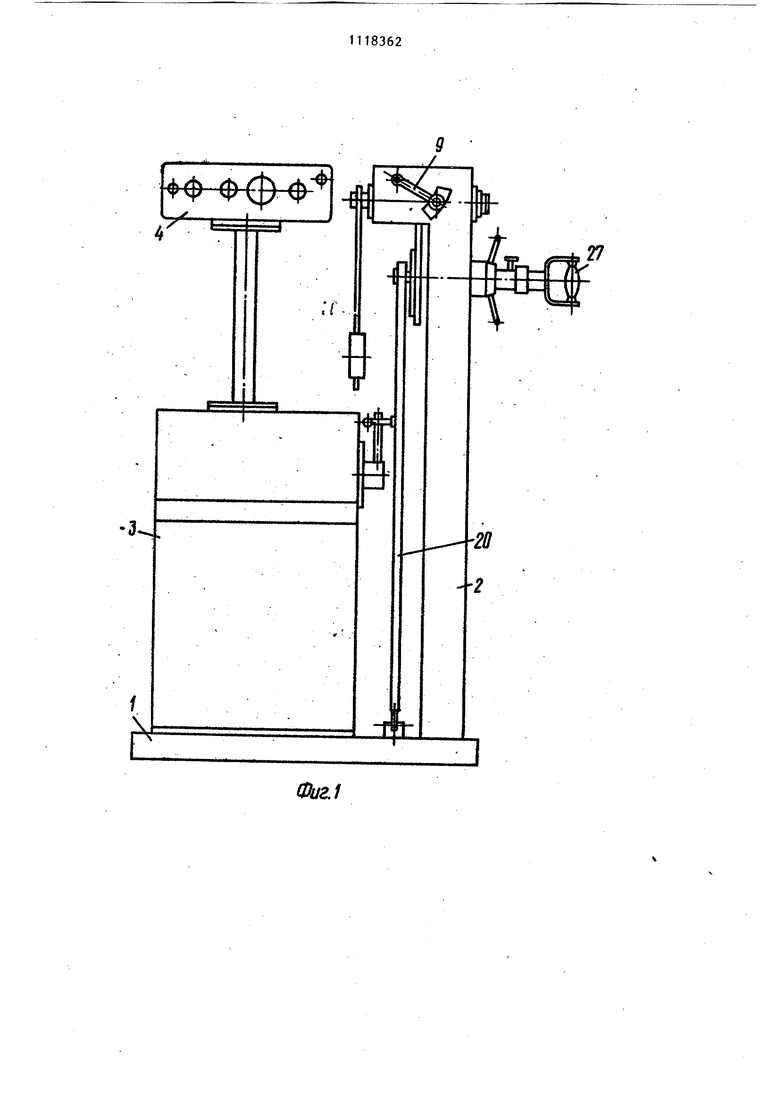
Изобретение относится к медицине а именно к травматологии и ортопеди Известно устройство для разработки суставов, содержащее раму с каретками, передаточный механизм и тормоз с регулируемой нагрузкой, кинематически связанный с валом каретки И Однако известное устройство не позволяет осуществлять переход с ак тивной разработки ,на пассивную, . а также имеет сложную конструкцию. Наиболее близким к предлагаемому является устройство для разработки ,суставов, содержащее стойку, на которой установлена с возможностью продольного перемещения каретка с рабочим элементом, маятниковый механизм и привод 2j . Недостатком является длительней срок восстановления разрабатываемого сустава. ,; Цель изобретения - сокращение сроков восстановления разрабатыэаемого сустава.. Поставленная цель достигается тем что устройство для разработки суставов , содержащее стойку, на которой установлена с возможностью продольного перемещения каретка с рабочим элементом, маятниковый механизм и привод, снабжено кулачковой муфтой, которая связана при помощи регулируемого, кривошипно-кулисного механизма с приводом, на одном конце вала кулачковой муфты установлен маятн ковый механизм, а другой конец вала связан посредством гибкой передачи с кареткой, причём одна из звездочек гибкой передачи установлена в каретке, а на валу этой звездочки установ лен рабочий элемент, j При этом с целью снижения болевых Ощущеннй при пассивном режиме разработки I каретка снабжена подпружиаенными натяжными роликами, установ.ленными с противоположных сторон от звездочки. . : На фиг. 1 показан аппарат, общий Нйд; нафиг. ii - кинематическая схема -аппарата; на фиг. 3 - вид А на фиг, Аппарат содержит опору 1, на кот рой установлены стойки 2 и электройриводЗ с пультом управления 4. В стойке 2 расположена кулачковая муфта 5, состоящая из одной подвижвЬй полумуфты 6 и двух неподвижных йопумуфт 7 и 8. Полумуфта 6 перемеща ется и фиксируется рукояткой 5. В стойке 2 расположена гибкая передача, включающая в себя звездочки 10 и 11, на которые надет гибкий элемент, например цепь 12. Устройство снабжено кареткой 13, которая содержит звездочки 14, огибаемые цепью 12, и ролики 15, подпружиненные прз инами 16. Свободные концы пружин 16 упираются в стенку корпуса каретки 13. На верхней стенке каретки 13 закреплены тросы 17с противовесом 18, которые надеты наблоки 19. Электропривод 3 через кривопшпно-кулисный механизм 20 соединен с муфтой 5. Кривошипно-кулисный механизм 20 содержит кривошип 21 с ползуном 22 и кулису 23. Кулачковая муфта 5 содержит вал 24, на один конец которого надета звездочка 11, а на другой - маятниковый механизм 25. Каретка 13 снабжена рабочим элементом 26, сидящим на валу звездочки 14, на которьм в зависимости от вида разрабатываемого сустава устанавливают сменные приспособления 27. Аппарат работает следующим обра- зом. В зависимости от разрабатьгоаемого сустава каретку 13 устанавливают на требуемый высоте путем ее перемещения вручную вдоль цепи 12. Компенсация массы каретки 13 достигается наличием противовеса. Н,а рабочий элемент 26 устанавливают лриспособление 27, необходимое для фиксации разрабатьюаемого сустава, например голеностопного, плечевого, сустава пальца и т.д. Рукояткой 9 устанавливают один из трех режимов работы пассивный, активный без нагрузки или активный с дозированной нагрузкой . При этом происходит перемещение полумуфты 6, которая при пассивном режиме разработки сцеплена с полумуфтой 7, при активном режиме без нагрузки занимает нейтральное положение, а при активном ре;жиме с нагрузкой, сцеплена с полумуфтой 8. При пассивном режиме разработка суставов осуществляется электроприводом 3, при активном режиме без нагрузки электропривод 3 и маятниковый механизм 25 отключены и движения суставов производятся за счет усилий больного. При активном режиме с нагрузкой отключен только электро3 . привод 3, а нагрузка на разрабаты.ваемый сустав создается маятниковым механизмом 25.При активном режиме без нагрузки больной качает вал звездочки 14, преодолевая сопротивление силы трения. При активном режиме с дозированной нагрузкой нагрузка устанавливается при помощи груза на маятниковом механизме 25, в зависимости от положения груза больной прикладывает определенное усилие, при этом качение вала звездочки 14 передается через гибкую передачу валу 24 с маят никовым механизмом 25. Угол качения (амплитуда) замеряют по лимбу (не показан)., «-W - При пассивном режиме регулируют угол качания перемещением ползуна 22 п кривошипу 21 и, осуществив сцеплени полумуфты 6 с полумуфтой 7, включают электропривод 3. Движение переда ется от электропривода 3 через кривошипно-кулисный механизм 20 на полумуфту 7 и вал 24. При,этом звездочка 11 приводит в движение ги кую передачу и через звездочку.14 движение передается рабочему элемен ту 26. . Конструкция аппарата предусматривает возможность пepeклtoчeния аппарата с одного режима работы на дру гой без остановки аппарата, что достигается переключением муфты 5 с помощью рукоятки 9. В случае установки угла качения рабочего элемента 26, превышающего возможности разрабатываемого сустава, травма последнего исключена за с-чет наличия компенсирующих элементов, выполненных в виде.роликов 15 и пружин 16, так как излишний угол качания компенсируется за счет деформации пружин .16 без передачи усилия на сустав. Таким образом, эффективность предлагаемого устройства заключается в возможности реабилитации суставов верхних и НИЖД1ИХ конечностей больного как в пассивном, так ив активном режимах без нагрузки и с нагрузкой. Возможность перехода с пассивного режима на активный без выключения аппарата, возможность регулирования угла качания рабочего органа, дозирования нагрузки на разрабатываемый сустав и исключение вероятности травмирования больных позволяют ускорить процесс восстановления здоровья лвдей.
Фиг,1
ВидА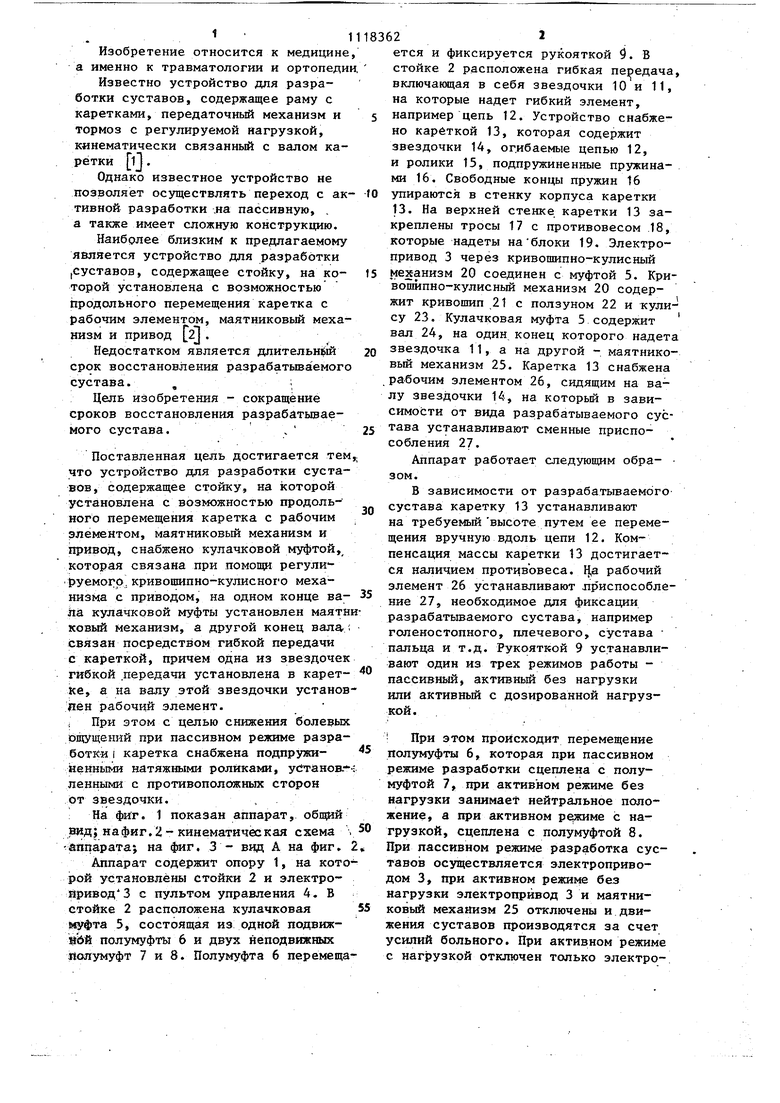
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ НИЖНИХ КОНЕЧНОСТЕЙ | 2007 |
|
RU2352316C1 |
| Устройство для разработки подвижности в суставах нижних конечностей | 1982 |
|
SU1152589A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Устройство для разработки движений в коленном суставе | 1985 |
|
SU1243691A1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ДВИЖЕНИЙ В СУСТАВАХ ВЕРХНЕЙ КОНЕЧНОСТИ | 2000 |
|
RU2177295C1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
1. УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ СУСТАВОВ, содержащее стойку на которой установлена с возможностью продольного перемещения с рабочим элементом, маятникоШ||й механизм и привод, отличающееся тем, что, с цепью сокращения сроков восстановления разрабатываемого сустава, устройство снабжено кулачковой муфтой, которая связана при помощи регулируемого кривощипно-кулисного механизма с приводом, на одном конце вала кулачковой муфты установлен маятниковый механизм, a другой конец вала связан посредством гибкой передачи с кареткой, причем одна из звездочек гибкой передачи установлена в каретке, I a на валу этой звездочки расположен рабочий элемент. 2. Устройство по п. 1, отлиг чающееся тем, что, с целью снижения болевых рпопцений при пассивном режиме разработки, каретка снабжена подпружиненными натяжными роликами, установленными с противоположных сторон от звездочки.
| I | |||
| Устройство для проведения гимнастических упражнений в стационарных условиях | 1976 |
|
SU611615A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| , 2 | |||
| Травматологические и ортопедические аппараты, и их применение | |||
| Под ред Н.Н | |||
| Приорова и Л.И | |||
| Эдписа | |||
| М., 1953, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
