Изобретение относится к вычислительной технике и может быть использовано для повьшения надежности устройств программного управления сложными техническими объектами, включая микропроцессорные и микромашинные системы. Известно устройство для контроля программной синхронизации, содержащее счетчик времени и логические элементы, обеспечивающие вьщачу сигнала аварийного прерывания в случае обнаружения сбоя программы 1 J. Недостатком известного устройства является низкое быстродействие контроля. Наиболее «близким к предлагаемому является устройство для контроля Программой синхронизации,содержащее два счетчика и элемент И и, обеспечивающее вьдачу аварийного сигнала в случае обнаружения сбоя программы 23 Недостатком данного устройства яв ляется низкое быстродействие контроля, обусловленное тем, что после любого слоя управляющейпрограммы, включая и самоустраняю1щеся сбои, требуется исполнение длительной процедуры восстановления. Кроме того, для осуществления контроля необходима программная настройка устройства на исполнение каждого отдельного модуля программы, что также требует определенных непроизводительных затрат времени. Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что в устройство Для контроля блока управления роботом, содержащее первый и второй счетчики и первый элемент И, введены два элемента ИЛИ, схему сравнения и генератор импульсо причем выход генератора импульсов соединен с счетным входом первого счетчика, выход переполнения которого является контрольным выходом устройства, вход начальной установки устройства соединен с первьм входом первого элемента ИЛИ, выход которого соединен с входом начальной установки первого счетчика, первый и вто рой выходы контролируемого блока сое динены соответственно с первым и вто рьм входами второго элемента ИЛИ, выход которого соединен с первым входом элемента И, адресный вход устройства, являющийся адресным выходом контролируемого блока соединен с первым входом сравнения, выход которой соединен со вторым входом элемента И, выход элемента И соединен со вторым входом первого элемента ИЛИ и со счетным входом второго счетчика, информационный выход которого соединен со вторым входом схемы сравнения Г2 3. На чертеже изображено предлагаемое устройство. Устройство для контроля блока управления роботом содержит два счетчика 1 и 2, элемент ИЗ, два элемента ИЛИ 4 и 5, схему 6 сравнения и гёгенератор 7 импульсов, выход которого подключен к счетному входу счетчика 1, выход переполнения которого является выходом устройства, а вход начальной установки связан с выходом первого элемента ИЛИ 4, первый вход которого является входом начальной установки устройства, а второй вход подключен к выходу элемента И 3 и к счетному ВХОДУ второгосчетчика 2, выход которого подключен к первому входу схемы 6 сравнения, второй вход которой является адресным входом устройства, а выход подключен к первому входу элемента ИЗ, второй вход которого соединен с выходом второго элемента ИЛИ 5, первый и второй входы которого являются соответственно первьм и вторым входами устройства, соединенные с выходами блока управления роботом. Устройство работает следующим образом. Для управления сложными техническими Объектами широко используются программные средства, как правило, сложныетехнические объекты имеют п степеней свободы, каждая из которых содержит исполнительный привод и датчик состояния. Сзпцность управления подобными объектами состоит в циклическом воспроизведении процедуры обслуживания его степеней свободы. В связи с этим типовая структура управляющей программы также носит циклический характер. В процессе нормального исполнения программы вырабатьтаются сигналы программной синхронизации, которые являются импульсами опроса датчиков состояния и вьдачи управляющих, воздействий на исполнительные приводы степеней свободы объекта. При этом номер обслуживаемой степени определяется адресом, формируемым программой. В начале очередного цикла исполнения программы формируется нулевой адрес (у 0) , соответствующий нулевой степени свободы объекта. Затем гене рируется первьй программный синхросигнал, по которому осуществляется чтение адресуемого датчика состояния. Полученная информация, обрабат ваемая в течение некоторого времени меньше критического. По окончании обработки генерируется второй программный синхросигнал, обеспечивающи поступление управляющего воздействия на. адресуемый исполнительный привод объекта. Затем осуществляется адресация к следующей степени свободы () и цикл: первьй программный синхросигнал - обработка - второй програм мный синхросигнал повторяется. Прог раммные действия производятся до тех пор, пока полностью вьщадутся управляющие воздействия по всем степеням свободы объекта. После этого вновь осуществляется адресация и нулевой степени свободы () и начинается следующий цикл обслужи вания степеней свободы объекта. Таким образом, при правильном функционировании программы последов тельно генерируются строго череДую. щиеся во времени первый и второй си налы программной синхронизации. Контроль программной синхронизации в предлагаемом устройстве осуществляется следующим образом. На адресный вход устройства и, соответственно, на второй вход схемы сравнения 6 поступает п -разрядньй код адреса степени свободы. Величины ни N связаны соотношение N 2 . На первьй вход схемы 6 срав нения поступает контрольный код старших разрядов второго ()-1+1)-разрядного счетчика 2, указывающий номер обслуживаемой степени объекта. При совпадении кода адреса с контрольным кодом схемы 6 сравнения ср батьшает и на ее выходе появляется сигнал, открывающий элемент И 3. В процессе обращения к адресуемой степени свободы первый и второй программные синхросигналы поочередно поступают на второй элемент ИЛИ с выхода которого через открытый эл мент И 3 подаются на счетный вход второго счетчика 3 и увеличивают на единицу его контрольньй код. Одновременно сигналы с выхода элемента И 3 через второй элемент 4 поступают на вход начальной установки первого счетчика 1 и осуществляют сброс последнего. При правильном функционировании программы в моменть поступления синхросигналов контрольный код второго счетчика 2 всегда совпадает с кодом на адресном входе устройства, что обеспечивает открытое состояние элемента И 3 в эти моменты времени и обнуление первого счетчика 1. Это предотвращает формирование аварийного сигнала на выходе устройства. Если в процессе обслуживания степеней свободы объекта -нарушается нормальньй ход управляющей программы, то это .приводит либо к появлению неверного кода на адресном входе устройства в моменты поступления сигналов программной синхронизации, либо к нарушению нормального временного интервала между ними (многократное появление сигналов программной синхронизации при постоянном адресе, являющееся следствием зацикливания программы, или пропадание этих сигналов), приводящего к искажению контрольного кода на выходе второго счетчика 2. В обоих указанных случаях возникает неравенство кодов на входах схемы 6 сравнения, что вызьшает формирование сигнала, запирающего элемент И 3 и блокирующего прохождение импульсов сброса на первьй счетчик 1. При этом первьй счетчик 1 воздействием сигналов от генератора 7 импульсов осуществляет процесс контрольного счета времени нарущенйя хода управляющей програ;ммы. Если это время превышает критическое, то первьй счетчик 1 переполняется. , В результате на выходе устройства появляется аварийный сигнал,который в дальнейшем может бьпь использован для восстановления процесса управления путем, например, принудительного запуска управляющей программы с начального адреса. Значение критического интервала времени для различных технических объектов может .выбираться самым различным образом. Для большинства объектов управления характерны большая частота s вьщачи управляющих воздействий и инерционность исполнительных приводов, вследствие чего кратковременны одиночные нарушения циклов обслуживания степеней свободы объекта не приводят к функ191он льному отказу системы. В результате этого вследствие циктгчности управляющей щюграммы имеется возможность к сам восстановлению нормального хода про цесса управления объектом уже в следующем цикле обслуживания. В эти условиях критическое время выбирает ся равным времени исполнения двухтрех полных циклов обслуживания степеней свободы объекта. Работа ус ройства в период самовосстановления программы характеризуется тем, что контрольный код на выходе второ го счетчика 2 остается неизменным, а код на адресном входе устройства под воздействием программы постепенно изменяется и в конце концов принимает значение, равное контроль ному. Начиная с момента совпадения кодов, устройство входит в синхронизм с программой, и его работа в дальнейшем не отличается от описанной. В этих условиях устройство обладает нечувствительностью не тольк к кратковременным случайным нарушениям хода управляиицей программы, но и к сбоям контрольного кода во втором счетчике 2. Для исключения формирования лож ного аварийного сигнала в момент пу ка управляющей программы на вход начальной установки устройства подается сигнал, проходящий через пер вый элемент ИЛИ 4 и вызьшайщий обнуление первого счетчика 1. При это начальная установка второго счетчик 2 не требуется. Если объект управления не допус-; кает однократных кратковременных нарушений хода управляющей программы, то в качестве критического времени целесообразно выбирать максимально допустимый в процессе нормального функционирования временной интервал между двумя последовательными вьщачами сигналов программной синхронизации. При начальном пуске управляющей программы в этом случае должна вьтолняться процедура подготовки, приводящая к автоматическому наступлению синхронизма устройства с программой. Для отказа от подобной процедуры необходимо обнулять второй счетчик 2 в начале работы устройства. Для этого вход начальной установки второго счетчика 2 может быть соединен с входом начальной установки устройства. При этом в случае возникновения аварийного сигнала на выходе устройства, доляша активироваться программа, определяющая дальнейшее поведение системы. Величина критического времени определяется частотой импульсов генератора 7 и разрядностью первого счетчика 1. Предлагаемое устройство по сравнению с прототипом обладает повышенным быстродействием контроля, так как не требует дополнительных затрат на настройку устройства перед исполнением каждого, программного модуля обеспечивает повышенную надежность контроля, поскольку в процессе его работы допустимы сбои второго счетчика 2, и более высокую достоверность контроля вследствие исключения реакции на однократные сбои программы, не приводящие к функциональному отказу контролируемой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отладки программ | 1986 |
|
SU1399745A1 |
| ОТКАЗОУСТОЙЧИВАЯ БОРТОВАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА, УСТРОЙСТВО "СЛУЖБА СТОРОЖЕВОГО ТАЙМЕРА, СПОСОБ РАБОТЫ ОТКАЗОУСТОЙЧИВОЙ БОРТОВОЙ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ" | 1998 |
|
RU2131619C1 |
| Устройство для тестового контроля цифровых блоков | 1986 |
|
SU1345199A2 |
| Устройство для контроля программ | 1988 |
|
SU1529226A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО КОНТРОЛЯ | 1991 |
|
RU2015523C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПЕРЕМЕЖАЮЩИХСЯ НЕИСПРАВНОСТЕЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ | 1992 |
|
RU2030784C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПЕРЕМЕЖАЮЩИХСЯ ОТКАЗОВ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ | 1996 |
|
RU2099777C1 |
| Имитатор абонентов | 1986 |
|
SU1325490A2 |
| Устройство для контроля выполнения программ (его варианты) | 1985 |
|
SU1315981A1 |
| Устройство для контроля и диагностирования цифровых узлов | 1989 |
|
SU1755207A1 |
, УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЛОКА УПРАВЛЕНИЯ РОБОТОМ, содержащее первьй и второй счетчики и первый элемент И, отличающееся тем, что, с целью повыш ния быстродействия в устройство вв дены два элемента ИЛИ, схема сравнения и генератор импульсов,причем выход генератора импульсЪв соединен со счетным входом первого счетчика, выход переполнения которого являетсй контрольным выходом устройства, вход начальной установки устройства соединен с первым входом первого. элемента ИЛИ, выход которого соединен со входом начальной установки первого счетчика, первьй и второй выходы контролируемого блока соединены соответственно с первым и вторым входами второго элемента ИЛИ, выход которого соединен с первым входом элемента И, адресный вход устройства являющийся адресным выходом контролируемого блока, соединен с первым входом схемы сравнения, выход которой соединен со вторым входом элемента И, выход элемента И соединен со вторым входом первого элемента ИЛИ и со счетным входом второго счетчика, информационньй выход которого соединен со вторым входом схемы сравнения. 1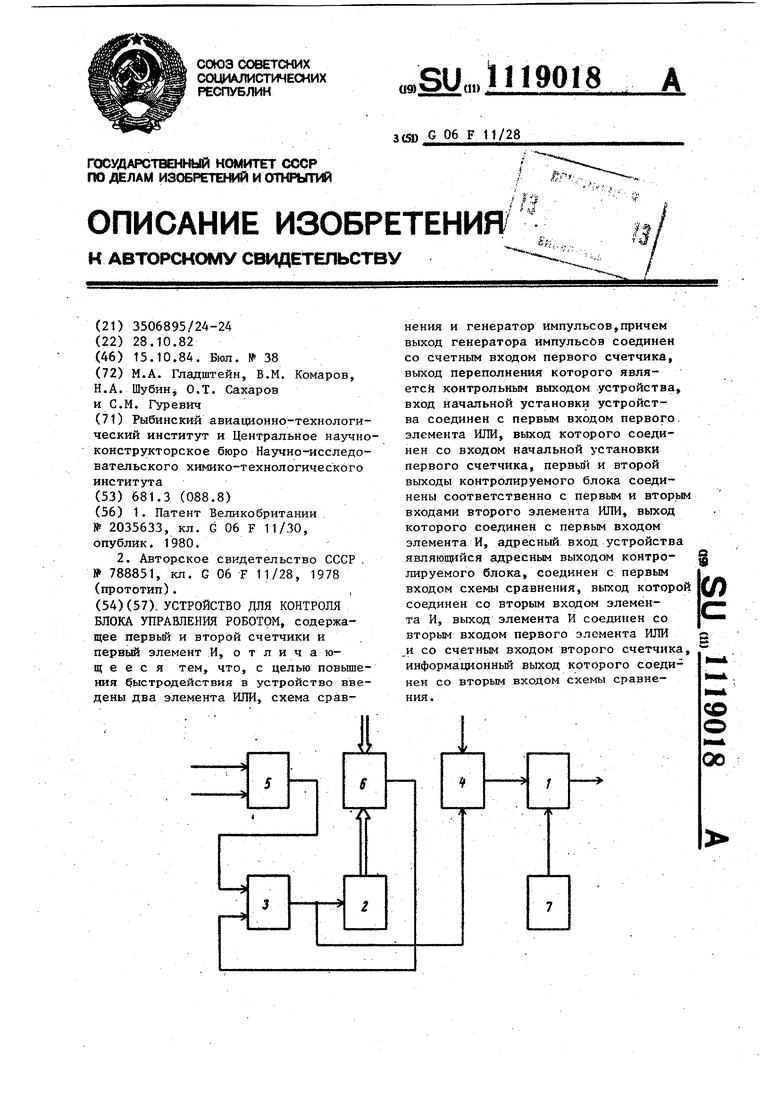
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЗАКЛЕПОЧНОЕ СОЕДИНЕНИЕ | 1989 |
|
RU2035633C1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 788851, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
