Афиг.
Изобретение относится к автоматике и технической кибернетике, в частности к способам автоматического распознавания изображений, и может быть использовано в тех областях науки и техники, где необходимо определять принадлежность различных структур к тому или иному классу на основе характерных приз накоВ и« изображений.
Известен способ формирования признаков для распознавания; изображений однороных структур, основанный на построчном сканировании изображений объектов или структур, формировании; сигналов пересечения сканирующим лучом контура объекта и последующем анализе получаемых при этом видеоимпульсов, соответствующих хордам сканируемых объектов 1.
Однако данный способ успешно применяется только для распознавания и анализа : изображений структур, которые образованы элементами с четко выраженными границами. Большинство естественных природных структур является полутоковыми. Поэтому формирование признаков для распознавания изображений полутоковых структур данным способом невозможно.
Наиболее близким к предлагаемому является способ формирования признаков для распознавания изображений однородных структур телевизионным методом, заключающийся в том, что для каждого направления сканирования распознаваемого изображения формируют видеосигнал, сравнивют видеосигнал с опорными сигналами и формируют опорные импульсы. Полученная последовательность импульсов используется для построения признаков, несущих информацию о структуре распознаваемого изображения 2.
Однако из-за своей универсальности известный способ сложен в реализации и снижает скорость распознавания изображений.
Цель изобретения - повышение быстродействия формирования признаков.
Поставленная цель достигается тем, что согласно способу формирования признаков для распознавания изображений однородных структур, заключающемуся в том, что для каждого направления сканирования изображения формируют видеосигнал, сравнивают видеосигнал с опорными сигналами, сравнение видеосигнала с опорными сигналами осуществляют выделением локальных экстремумов видеосигнала и в моменты достижения видеосигналом локальных экстремумов формируют первую последовательность импульсов, регистрируют моменты совпадения видеосигнала с опорными сигналами и формируют вторую последовательность импульсов, генерируют последовательность опорных импульсов, фильтруют эту последовательность видеосигналом и формируют третью последовательность импульсов, по последовательностям импульсов судят о распознаваемых изображениях.
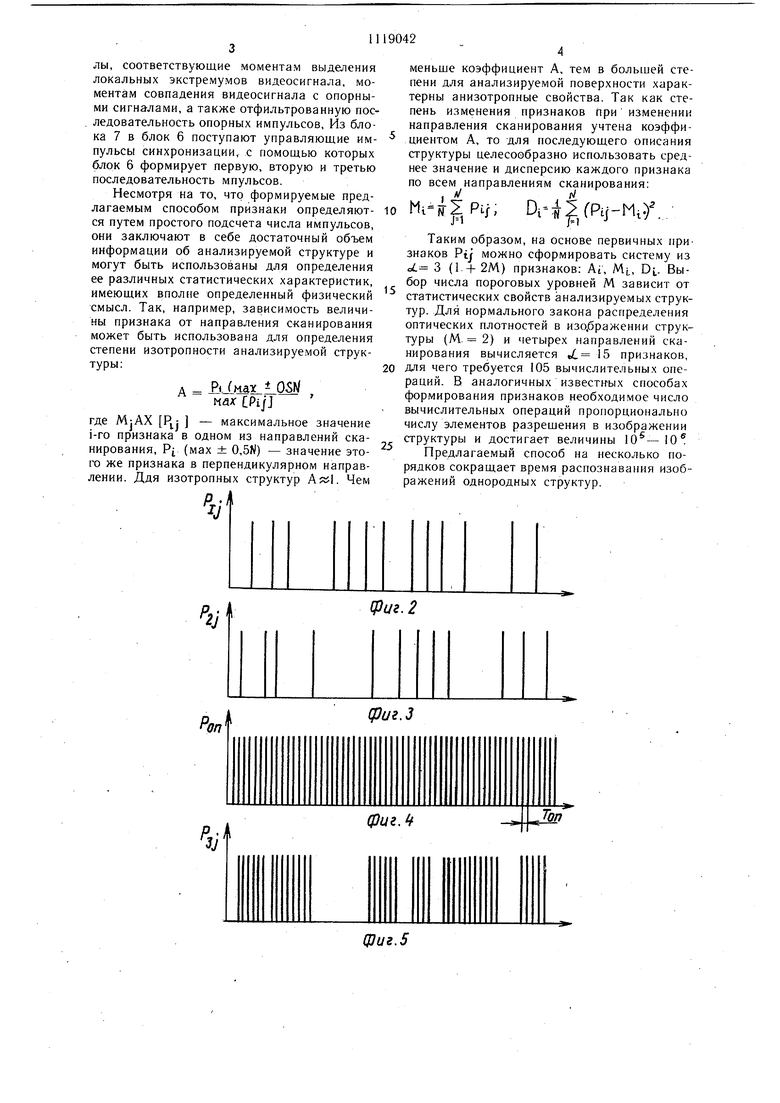
На фиг. 1-5 приведены.диаграммы формирования признаков по предлагаемому способу; на фиг. б - блок-схема устройства, реализующего способ.
Формирование признаков для распознавания изображений однородных структур происходит следующим образом.
Изображение структуры сканируется
построчно в каждом из N заданных направлений. Под направлением сканирования понимается угловая ориентация анализируемого изображения структуры, изменяемая от О до 180° относительно траектории движения луча. При этом видеосигнал принимает определенные значения (фиг. |). Для J-ro направления сканирования (J 1...N) и К-го порогового уровня (К 1...М) формируются признаки F|;; и Pji , (фиг. 2, 3 и 5) где признак Pj.- - число импульсов
в последовательности, определяемое количеством локальных экстремумов видеосигнала в J-OM направлении сканирования;.
Признак - число импульсов в последовательности, определяемое числом пересечений видеосигналом К-го порогового уровня.
Последовательность импульсов и последовательность опорных импульсов (фиг. 4), следующих с периодом Топ, используются для формирования последовательности импульсов Pj/ (фиг. 5), число которых характеризует длительность выбросов видеосигнала за К-ый. пороговый уровень и образует признак . Как видно из фиг. 5, последовательность импульсов Pj; формируется фильтрацией последовательности
опорных импульсов видеосигналом. Период опорных импульсов Тол должен быть существенно меньше средней длительности между локальными экстремумами видеосигнала. На фиг. 6 приведена блок-схема системы,
реализующей формирование признаков по предлагаемому способу. Система содержит блок 1 приема информации, блок 2 формирования видеосигнала, блок 3 выделения локальных экстремумов видеосигнала, блок 4 регистрации моментов совпадения видеосигнала с опорными сигналами, блок 5 фильтрации последовательности опорных импульсов видеосигналом, блок 6 формирования первой, второй и третьей последовательностей импульсов, блок 7 управления.
Система работает следующим образом. Сканирование изображений структуры осуществляется в (приемном) блоке 1. Образованный в блоке 2 видеосигнал поступает в блоки 3-5: Одновременно в эти блоки из блока 7 управления поступают управляющие импульсы синхронизации. В блок 4 - опорные сигналы, в блок 5 - опорные сигналы и последовательность опорных импульсов. Блок б принимает из блоков 3-5 сигналы, соответствующие моментам выделения локальных экстремумов видеосигнала, моментам совпадения видеосигнала с опорными сигналами, а также отфильтрованную последовательность опорных импульсов. Из блока 7 в блок 6 поступают управляющие импульсы синхронизации, с помощью которых блок 6 формирует первую, вторую и третью последовательность мпульсов.
Несмотря на то, что формируемые предлагаемым способом признаки определяются путем простого подсчета числа импульсов, они заключают в себе достаточный объем информации об анализируемой структуре и могут быть использованы для определения ее различных статистических характеристик, имеющих вполне определенный физический смысл. Так, например, зависимость величины признака от направления сканирования может быть использована для определения степени изотропности анализируемой структуры:
д PjjHax l,QSNf мах CPijJ
где MjAX - максимальное значение i-ro признака в одном из направлений сканирования, Р (мах ± 0,5N) - значение этого же признака в перпендикулярном направлении. Ддя изотропных структур . Чем
j
меньще коэффициент А, тем в большей степени для анализируе.мой поверхности характерны анизотропные свойства. Так как степень изменения признаков при изменении направления сканирования учтена коэффициентом А, то для последующего описания структуры целесообразно использовать среднее значение и дисперсию каждого признака по всем направлениям сканирования:
Mi4|pb/; Dr-i|rPijMi.y..
Таким образом, на основе первичных признаков Ptj можно сформировать систему из 0 3 (1.+ 2М) признаков: Ai, ML, DL- Выбор числа пороговых уровней М зависит от статистических свойств анализируемых структур. Для нормального закона распределения оптических плотностей в изо,бражении структуры (М. 2) и четырех направлений сканирования вычисляется вС 15 признаков, для чего требуется 105 вычислительных операций. В аналогичных известьгых способах формирования признаков необходимое число вычислительных операций пропорционально числу элементов разрешения в изображении структуры и достигает величины
Предлагаемый способ на несколько порядков сокращает время распознавания изображений однородных структур.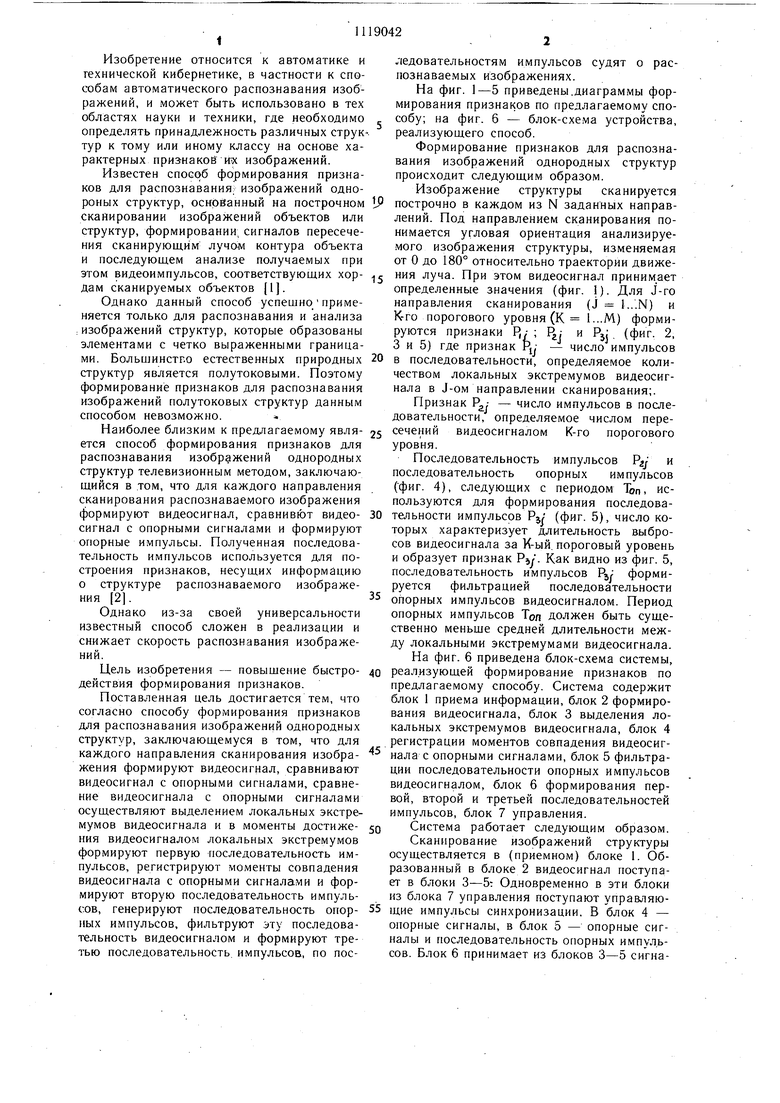
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования признаков для распознавания изображений | 1988 |
|
SU1564658A1 |
| Способ распознавания геометрических фигур | 1982 |
|
SU1020840A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2018 |
|
RU2707710C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2173880C2 |
| СПОСОБ РЕГИСТРАЦИИ ДИФФУЗНО ОТРАЖЕННОГО ИЛИ ДИФФУЗНО РАССЕЯННОГО ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2458361C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| Устройство для распознавания изображений объектов | 1983 |
|
SU1091196A1 |
| Способ формирования признаков для распознавания изображений объектов | 1978 |
|
SU748454A1 |

СПОСОБ ФОРМИРОВАНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОДНОРОДНЫХ СТРУКТУР, заключающийся в том, что для каждого направления сканирования изображения формируют видеосигнал, сравнивают видеосигнал с опорными сигналами, отличающийся тем, что, с целью повышения быстродействия способа, сравнение видеосигнала с опорными сигналами осуществляют выделением локальных экстрему.мов видеосигнала и в моменты достижения видеосигналом локальных экстремумов формируют первую последовательность импульсов, регистрируют моменты совпадения видеосигнала с опорны.ми сигналами и формируют вторую последовательность импульсов, генерируют последовательность опорных импульсов, фильтруют эту последовательность видеосигналом и формируют третью последовательность импульсов, по последовательностям импульсов судят о распознаваемых изображениях.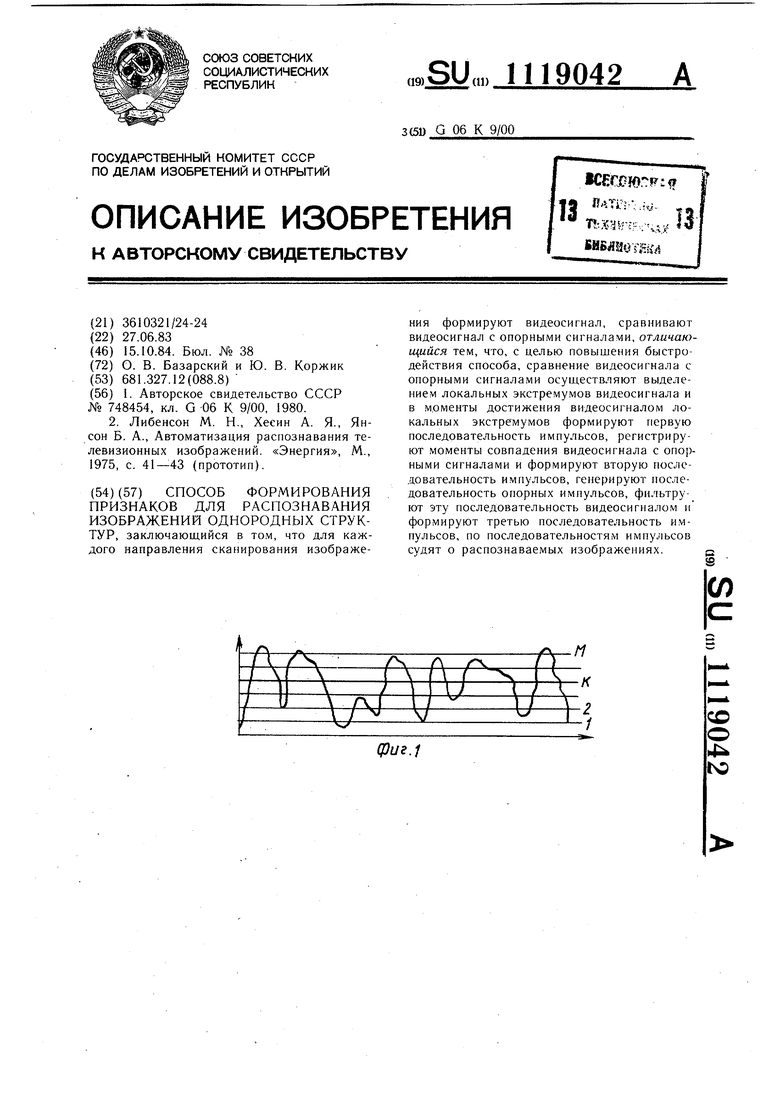
W
(риг.З
Тт
фцгЛ
фиг.5
| I | |||
| Способ формирования признаков для распознавания изображений объектов | 1978 |
|
SU748454A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Либенсон М | |||
| Н., Хесин А | |||
| Я., Янсон Б | |||
| А., Автоматизация распознавания телевизионных изображений | |||
| «Энергия, N., 1975, с | |||
| (прототип). | |||
