libra электродвигателей в широком диапазоне рабочих скоростей пресса. Устройство содержит основной 3 и вспомогательные 4 электродвигатели, общий тиристорньш преобразователь 7, систему автоматического регулирования скорости основного электродвигателя и систему автомат1«еского регулирования соотношений моментов между основным 3 и вспомогательными 4 электродвигателями в составе блоков 18 корректируюшдах воздействий, дат чиков 19 момента, регуляторов 20 момента и подчиненных им контуров ре
гулирования люка возбуждения вспомогательных электродвигателей 4. В данном устройстве обеспечивается повьшшние точности регулирования моментов вспомогательных электродви- тателей в широком диапазоне рабочих скоростей пресса за счет введения датчиков 19 и- регуляторов 20 момента, причем датчики 19 момента реализованы программным путем на базе микропроцессорной техники, что устраняет влияние скорости привода на распределение моментов вспомогательных электродвигателей, 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления многодвигательным электроприводом технологического пресса | 1983 |
|
SU1119153A1 |
| Способ автоматического распределения нагрузок в многодвигательном электроприводе технологического пресса | 1980 |
|
SU972645A1 |
| Многодвигательный электропривод агрегата непрерывной обработки полосы материала | 1986 |
|
SU1374394A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| Электропривод постоянного тока | 1986 |
|
SU1399873A1 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
Изобретение относится к электротехнике и может быть использовано в многодвигательных взаимосвязанных электроприводах постоянного тока с общим тиристорным преобразователем непрерывно-поточных агрегатов, в частности технологических прессов бумагоделательных машин. Целью изобретения является повышение точности регулирования моментов вспомогательных электродвигателей в широком диапазоне рабочих скоростей пресса. Устройство содержит основной 3 и вспомогательные 4 электродвигатели, общий тиристорный преобразователь 7, систему автоматического регулирования скорости основного электродвигателя и систему автоматического регулирования соотношений моментов между основным 3 и вспомогательными 4 электродвигателями в составе блоков 18 корректирующих воздействий, датчиков 19 момента, регуляторов 20 момента и подчиненных им контуров регулирования люка возбуждения вспомогательных электродвигателей 4. В данном устройстве обеспечивается повышение точности регулирования моментов вспомогательных электродвигателей в широком диапазоне рабочих скоростей пресса за счет введения датчиков 19 и регуляторов 20 момента, причем датчики 19 момента реализованы программным путем на базе микропроцессорной техники, что устраняет влияние скорости привода на распределение моментов вспомогательных электродвигателей. 3 ил.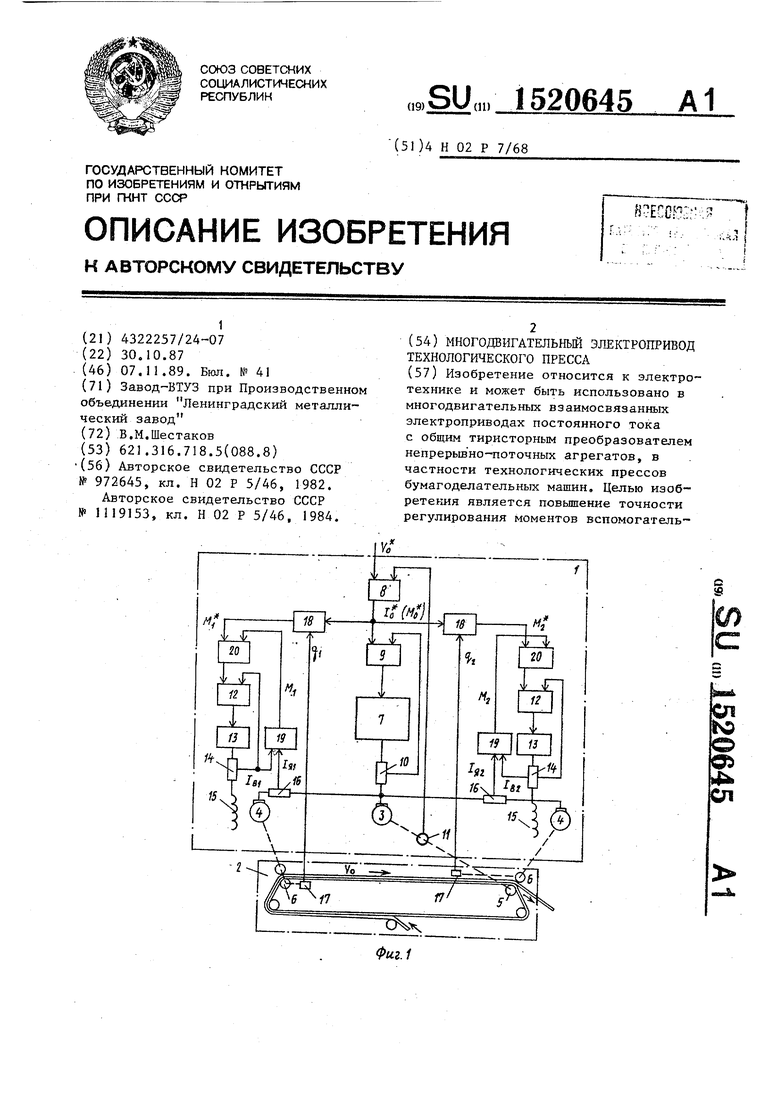
Изобретение относится к электро- технике и может быть использовано в многодвигательных взаимосвязанных электроприводах постоянного тока с общим тиристорным преобразователем непрерывнопоточ ых агрегатов, в частности технологических прессов бумагоделательных машин.
Цепь изобретения - повьшение точности регулирования моментов вспомогательных электродвигателей в широком диапазоне рабочих скоростей пресса.
На фиг.1 представлена схема электропривода; на фиг.2 - структурная схема микропроцессорного датчика момента; на фиг.З требуемая зависимость распределения-моментов электродвигателей в функции давления между валами пресса,
Многодвигательньй электропривод 1 технологического пресса 2, содержащий основной 3 и вспомогательные 4 электродвигатели, нагруженные на основной 5 и вспомогательные 6 валы, Якорн1яе обмотки.;, всех электродвигателей подключены к общему тиристор- ному преобразователю 7, Регулятор 8 скорости и регулятор 9 полного тока соединены последовательно, выход регулятора 9 подключен к входу общего тиристорного преобразователя 7, Датчик 10 полного тока выходом соединен с вторым входом регулятора 9 полного тока. Датчик 11 скорости основного электродвигателя 3 выходом подключен к входу регулятора 8 скорости. Последовательно соединены регулятор 12 тока возбуждения, преоб
5
0
5
0
5
0
5
разователь-возбудитель 13, датчик 14 тока возбуждения, выход которого подключен к второму входу регулятора 12 тока возбуждения, обмотка 15 возбуждения каждого из вспомогательных электродвигателей 4, Датчики 16 тока в якорных обмотках вспомогательных электродвигателей 4, а также датчики 17 давления валов пресса и блоки 18 формирования корректирующих воздействий первыми входами подключены к выходу регулятора 8 скорости, а вторыми - к выходам датчиков 17 давления.
Кроме того, электропривод дополнительно снабжен датчиками 19 и регуляторами 20 момента вспомогательных электродвигателей 4, причем первые входы датчиков 19 момента подключены к выходам датчиков 14 тока возбуждения, вторые входы - к датчикам 16 тока якорных обмоток вспомогательных электродвигателей 4. Выходы датчиков
19момента соединены с вторыми входами регуляторов 20 момента, первые входы которых подключены к выходам блоков 18 формирования корректирующих воздействий, а выходы регуляторов
20момента соединены с первыми входами регуляторов 12 тока возбуждения.
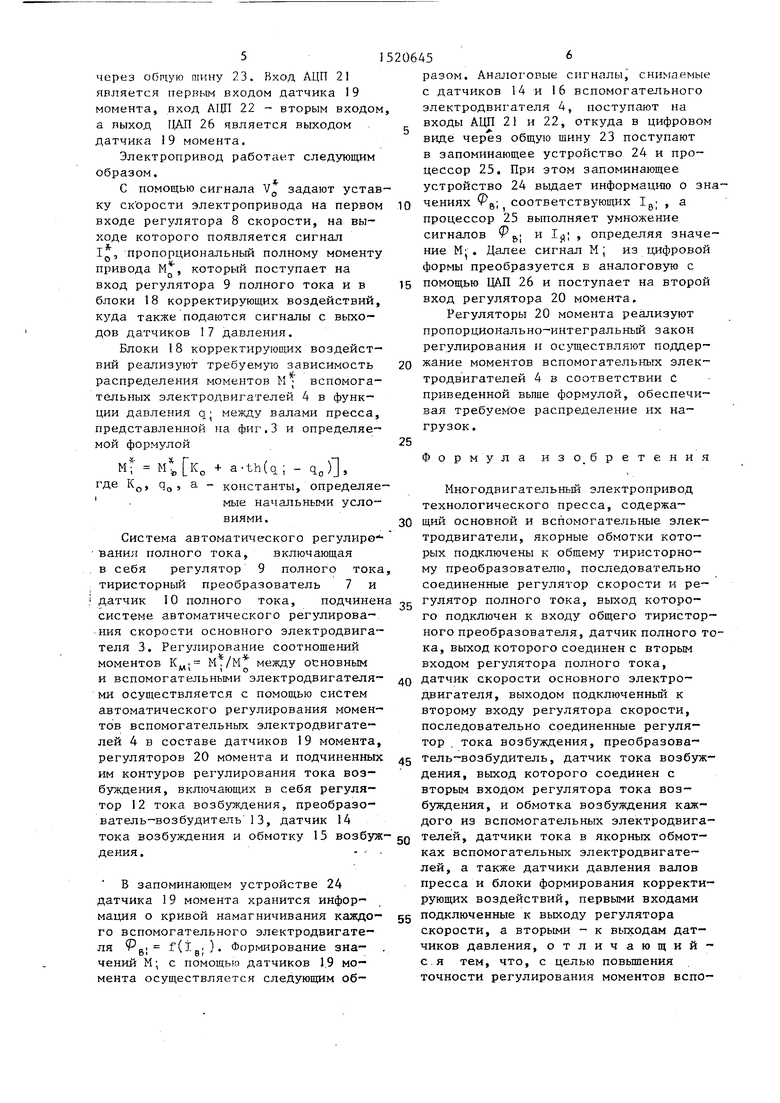
Датчики 19 момента имеют микропроцессорную реализацию и содержат входные аналого-цифро вые преобразователи (АЦП) 21 и 22, общую шину 23, запоминающее устройство 24, процессор
25 и выходной цифроаналоговый преоб разователь (ЦАЛ) 26, При этом запоминающее устройство 24 и процессор 25 соединяются с AIJJI 21 , 22 и ЦАП 26
через o6Fiyio шину 23. Вход АЦП 21 является первым входом датчика 19 момента, иход А1Щ 22 - вторым входом, а выход иди 26 является выходом р- датчика 19 момента.
Электропривод работает следующим образом.
С помощью сигнала V задают уставку ск орости электропривода на первом 10 входе регулятора 8 скорости, на выходе которого появляется сигнал 1.-Э пропорциональный полному моменту
V,
привода М, который поступает на вход регулятора 9 полного тока ив 15 блоки 18 корректирующих воздействий, куда также подаются сигналы с выходов датчиков 17 давления.
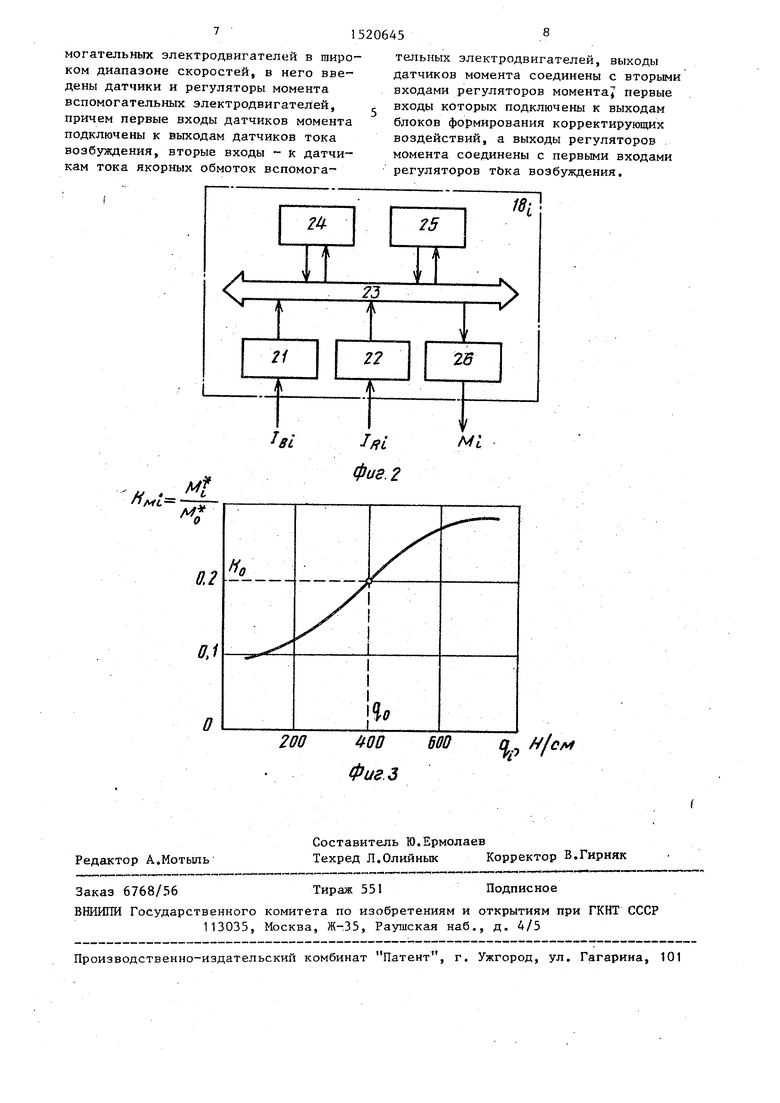
Блоки 1В корректирующих воздействий реализуют требуемую зависимость 20
f
распределения моментов М ; вспомогательных электродвигателей 4 в функции давления q; между валами пресса, представленной на фиг.3 и определяемой формулой25
М - a-th(qi - qj, где Kj,, q , а - константы, определяе- .мые начальными условиями.20
Система автоматического регулиро вания полного тока, включающая в себя регулятор 9 полного тока,
тиристорный преобразователь 7 и датчик 10 полного тока, подчинена с системе автоматического регулирова- ния скорости основного электродвигателя 3. Регулирование соотношений моментов К.., М,/М между основньм
ЛЛ I 1 (5
И вспомогательными электродвигателя- о ми осуп1ествляется с помощью систем автоматического регулирования моментов вспомогательных электродвигателей 4 в составе датчиков 19 момента, регуляторов 20 момента и подчиненных 5 им контуров регулирования тока возбуждения, включающих в себя регулятор 12 тока возбуждения, преобразователь-возбудитель 1 3, датчик 14 тока возбуждения и обмотку 15 возбуж- gg дения.-
В запоминающем устройстве 24 датчика 19 момента хранится информация о кривой намагничивания каждого вспомогательного электродвигателя PRI f(i.,.). Формирование зна
DIВт.
чений М; с помощью датчиков 19 момента осуществляется следующим об-
р-
0
5
0
5
0
с
о 5 g
5
разом. Аншюговые сигналы, снимаемые с датчиков 14 и 16 вспомогательного электродвигателя 4, поступают на входы АЦП 21 и 22, откуда в цифровом виде через общую шину 23 поступают в запоминающее устройство 24 и процессор 25, При этом запоминающее устройство 24 выдает информацию о значениях Фц; соответствующих Ig; , а процессор 25 выполняет умножение сигналов Pj, и 1 , определяя значение М; . Далее сигнал М; из цднфровой формы преобразуется в аналоговую с помощью ЦАП 26 и поступает на второй вход регулятора 20 момента.
Регуляторы 20 момента реализуют пропорционально-интегральный закон регулирования и ос тцествляют поддержание моментов вспомогательных электродвигателей 4 в соответствии С приведенной вьпяе формулой, обеспечивая требуемое распределение их нагрузок.
Формула изо.бретения
Многодвигательньш электропривод технологического пресса, содержащий основной и вспомогательные электродвигатели, якорные обмотки которых подключены к общему тиристорно- му преобразователю, последовательно соединенные регулятор скорости и регулятор полного тОка, выход которого подключен к входу общего тиристор- ного преобразователя, датчик полного тока, выход которого соединен с вторым входом регулятора полного тока, датчик скорости основного электродвигателя, выходом подключенный к второму входу регулятора скорости, последовательно соединенные регулятор . тока возбуждения, преобразователь-возбудитель, датчик тока возбуждения, вькод которого соединен с вторым входом регулятора тока возбуждения, и обмотка возбуждения каждого из вспомогательных электродвигателей, датчики тока в якорных обмотках вспомогательных электродвигателей, а также датчики давления валов пресса и блоки формирования корректирующих воздействий, первыми входами подключенные к выходу регулятора скорости, а вторыми - к выходам датчиков давления, отличающий- с.я тем, что, с целью повьшения точности регулирования моментов вспо-
могательных электродвигателей в широком диапазоне скоростей, в него введены датчики и регуляторы момента вспомогательных электродвигателей, причем первые входы датчиков момента подключены к выходам датчиков тока возбуждения, вторые входы - к датчикам тока якорных обмоток вспомога
Н.
тельных электродвигателей, выходы датчиков момента соединены с вторыми входами регуляторов момента первые входы которых подключены к выходам блоков формирования корректирующих воздействий, а выходы регуляторов момента соединены с первыми входами регуляторов тЬка возбуждения.
фи8.2
сл
| Способ автоматического распределения нагрузок в многодвигательном электроприводе технологического пресса | 1980 |
|
SU972645A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического управления многодвигательным электроприводом технологического пресса | 1983 |
|
SU1119153A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
