2. Устройство для управления передвижением секций механизированной крепи комбайнового комплекса, содержащее датчик местоположения комбайна, клапаны управления и датчики переднего положения секции крепи по числу секций крепи, отличающееся тем, что оно снабжено датчиком режима работы комбайна, шифратором и блоком управления секции крепи по числу секций, крепи, причем каждый блок управления секций крепи выполнен на элементах И, ИЛИ и дешифраторе, выход которого соединен с первыми входами первого и второго элементов И, выходы которых соединены с входами элемента ИЛИ, первый и второй входы riepBoro элемента И первой секции крепи объединены и второй и третий входы второго элемента И последней секции крепи объединены.
при этом выход датчика местоположения комбайна через шифратор соединен с входом дешифратора каждого блока управления секцией крепи, первый выход датчика режима работы комбайна подключен к второму входу второго элемента И каждого блока управления секций крепи, второй выход датчика режима работы комбайна подключен к второму входу первого элемента И каждого блока управления секций крепи, выход элемента ИЛИ соединен с клапанами управления, а каждый датчик переднего положения секций крепи, подключен к третьим входам второго элемента И каждого предыдущего и первого элемента И кажд()го последуюшего блока управления секций крепи и к соответствуюшему клапану управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления механизированной крепью | 1985 |
|
SU1293361A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2006 |
|
RU2324820C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2487244C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРЕДВИЖНОЙ МЕХАНИЗИРОВАННОЙ ШАХТНОЙ КРЕПЬЮ | 1969 |
|
SU254441A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2482277C1 |
| Устройство контроля местоположения угледобывающего комбайна в лаве | 1987 |
|
SU1479670A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2011 |
|
RU2514059C2 |
1. Способ управления передвижением секций механизированной крепи комбайнового комплекса, основанный на разгрузке, передвижке и распоре секций крепи, отличающийся тем, что, с целью повышения скорости крепления рабочего пространства за счет сокращения времени передвижки ме-, ханизированной крепи, распор каждой предыдущей секции механизированной крепи начинают одновременно с разгрузкой каждой последующей секции механизированной крепи и, не дожидаясь окончания распора каждой предыдущей секции механизированной крепи, начинают передвижку i каждой последующей секции механизированной крепи. (Л г 1C 4 ел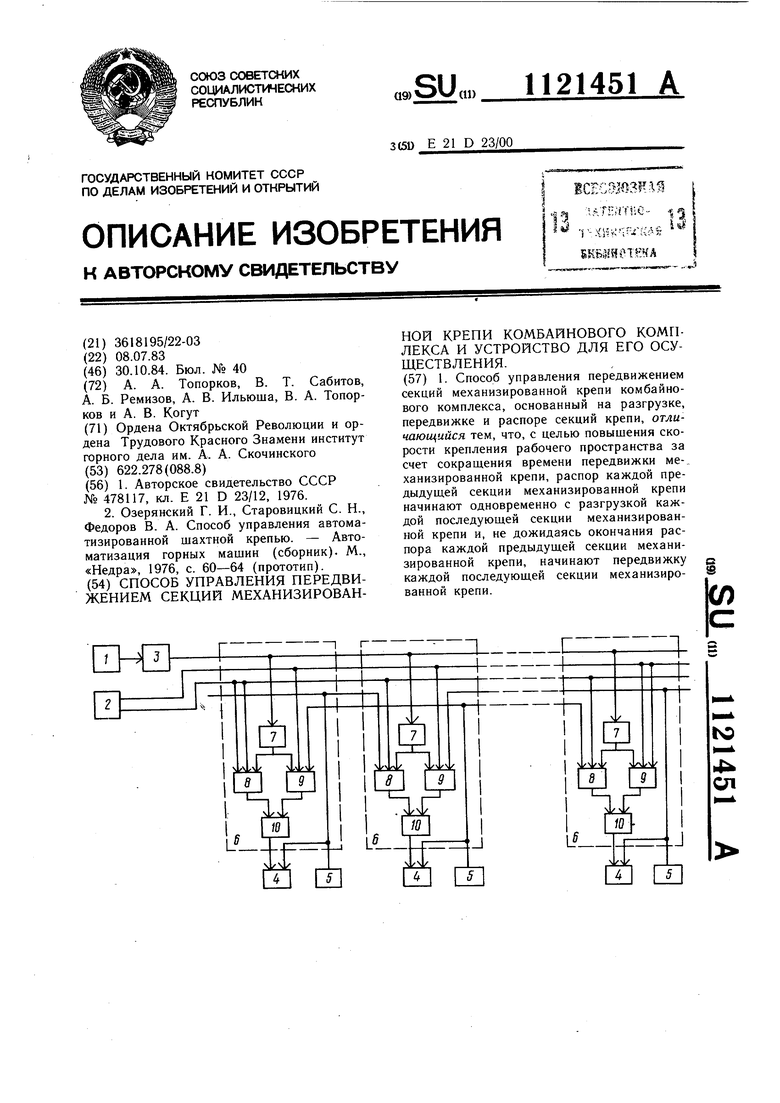
Изобретение относится к автоматизации механизированных крепей, а именно к способам и устройствам автоматического управления передвижения секций механизированной крепи комбайновых комплексов.
Известен способ автоматического управления передвижением секций механизированной крепи, основанный на том, что управление процессом крепления осуществляется оператором из лавы, а цикл передвижения секции осуществляется автоматически 1. Устройство для его реализации содержит датчики состояния крепи, кнопки управления, линию связи, исполнительные механизмы 1.
Известные способ и ycтpoйctвo не обеспечивают высокой скорости крепления, предполагают наличие человека-оператора в лаве.
Известен также способ управления передвижением секций механизированной крепи комбайнового комплекса, основанный на разгрузке, передвижке и распоре секции крепи 2.
Устройство для управления передвижением секций механизированной крепи комбайнового комплекса содержит датчик местоположения комбайна, клапаны управления и датчики переднего положения секции крепи по числу секций крепи 2.
Однако скорость крепления рабочего пространства недостаточна, поэтому зачастую возникают остановки комбайна при отсутствии крепления лавы за комбайном, что вызывает снижение производительности
комплекса и снижает нагрузку на лаву в целом.
Увеличить производительность угледобывающего комбайнового комплекса возможно за счет увеличения скорости крепЛенин рабочего пространства вслед за комбайном.
Целью изобретения является повышение скорости крепления рабочего пространства за счет сокращения времени передвижки механизированной крепи.
Поставленная цель достигается тем, что согласно способу управления передвижением секций механизированной крепи комбайнового комплекса, основанному на разгрузке, передвижке и распоре секций
крепи, распор каждой предыдущей секции механизированной крепи начинают одновременно с разгрузкой каждой последующей секции механизированной крепи и, не дожидаясь окончания распора каждой
предыдущей секции механизированной крепи, начинают передвижку каждой последующей секции механизированной крепи. Устройство для управления передвижением секций механизированной крепи комбайнового комплекса, содержащее датчик
л естоположения комбайна, клапаны управления и датчики переднего положения секции крепи по числу секций крепи, снабжено датчиком режима работы комбайна, шифратором и блоком управления секций
крепи по числу секций крепи, причем каждый блок управления секций крепи выполнен на элементах И, ИЛИ и дешифраторе, выход которого соединен с первыми вхолами первого и второго элементов И, выходы которых соединены со входами элемента ИЛИ, иервый i; второй входы первого элемента И первой секции кропи объединены и второй и третий входы второго элемента И последней секции крепи объединены, при этом выход датчика местоположения комбайна через шифратор соединен со входом дешифратора каждого блока управления секцией крепи, первый выход датчика режима работы комбайна подключен ко второму входу второго элемента И каждого блока управления секций крепи, второй выход датчика режима работы комбайна подключен ко второму входу первого элемента И каждого блока управления секций крепи, выход элемента ИЛИ соединен с клапанами управления, а каждый датчик переднего положения секций крепи подключен к третьим входам второго элемента И каждого предыдущего и первого элемента И каждого последующего блока управления секций крепи и к соответствующему клапану управления. На чертеже изображена функциональ-. ная схема устройства автоматического управления передвижением секций механизированной крепи комбайнового комплекса.
Устройство содержит датчик местоположения комбайна 1, датчик режима работы комбайна 2, шифратор 3, клапаны управления 4, датчики переднего положения секции 5, блоки управления секциями крепи 6; каждый из которых содержит дешифратор 7, первый 8 и второй 9 элемент И, элемент ИЛИ 10. Датчик местоположения комбайна 1 через шифратор 3 подключен в каждом блоке управления секции крепи 6 ко входу дешифратора 7. Выход дешифратора 7 соединен с первыми входами первого 8 и второго 9 элементов И, выходы которых подсоединены к входам элемента ИЛИ 10, а его выход соединен с первым входом клапана управления 4, второй вход которого соединен с датчиком переднего положения секции 5. К датчику переднего положения секции 5 подключен третий вход второго элемента И 9 соседнего блока управления секцией крепи 6. Первый и второй выхот. датчика режима работы комбайна 2 соединен с вторыми входами соответственно первого 8 и второго 9 элементов И всех блоков управления секции крепи 6. В блоке управления предыдущими секциями крепи 6 первый вход первого элемента И 8 соединен со вторым выходом датчика режима работы комбайна 2. В блоке управления последующей секции крепи 6 первый вход второго элемента 9 соединен со вторым выходом датчика режима работы комбайна 2.
(люсоб с помощью ycTpoiicTBa осуществляется следующим образом.
В исходном состоянии комбайн находится в одном из концов лавы, на выходах датчик)в 1. положения комбайна в
5 лаве и 2 режима работы комбайна отсутствуют сигна,1ы. В связи с этим заперты первые 8 и вторые 9 элементы И и закрыты клапаны управления 4. Секции крепи расперты в кровлю. 10
С началом рабочего хода комбайна на выходе датчика 2 режима работы комбайна появляется сигнал, поступающий на входы первых элементов И 8. При прохождении комбайном первой секции крепи датчик 1 местоположения комбайна через шифратор 3 и дешифратор 7 первого блока управления секцией крепи 6, первый элемент И 8, элемент ИЛИ 10 своим сигналом включает клапан управления 4, по ко0 манде которого первая секция раз1ружается и передвигается на шаг передвижки. Окончание передвижки фиксирует датчик 5 переднего положения секции крепи и своим сигналом выключает клапан управления 4, при этом секция начинает распираться. Одновременно с этим сигнал с датчпка 5 переднего положения секции поступцет на первый вход первого элемента И 8 второго блока управления 6 и при условии, что комбайн прошел вторую секцию, что
0 зафиксировал датчик 1 местоположения комбайна и своим сигналом через шифратор 3 и дешифратор 7 подготовил к включению первый элемент И 8 второго блока управления 6, который своим сигналом через элемент ИЛИ 10 включает клапан управ5 ления 4. Вторая секция при этом начинает разгружаться и передвигаться. Таким образом происходит одновременное начало распора первой секции и разгрузки и передвижки второй секции. Окончание
Q передвижки второй секции фиксирует соответствующий датчик переднего положения секции 5 и ставит своим сигналом секцию на распор через клапан управления 4, а третью секцию на разгрузку и передвижку. Процесс управления пере5 движением следующих секций происходит аналогично с автоматическим совмещением операций распора с разгрузкой и передвижкой.
При обратном рабочем ходе комбайна появляется сигнал на втором выходе датчика 2 режима работы комбайна, который поступает на входы вторых элементов И 9 -блоков управления секциями крепи 6, что обеспечивает передвижение секций в об5 ратном порядке.
При холостых ходах комбайна сигналы на выходах датчика режима работы комбайна 2 отсутствуют.
Таким образом, за счет автоматического совмещения операций повышается скорость крепления рабочего пространства вслед за комбайном, что . позволяет повысить производительность угледобывающего комбайнового комплекса.
Экономический эффект от использования предлагаемого изобретения с учетом ориентировочной потребности народного хозяйства в системах автоматизации с автоматическим совмещением операций по передвижке секций крепи до 300 комплектов в год (по числу механизированных комплексов) в сравнении с базовым объектом составит 15-20 тыс. руб. на один комплект в год. Экономический эффект предполагается получить за счет повыщения производительности комплекса на , снижения чисенности рабочих, занятых на креплении, в два раза, снижения себестоимости добычи угля на 3%. За базовый объект принята
система автоматизации крепи М-103.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления крепью оператором из лавы | 1972 |
|
SU478117A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Озерянский Г | |||
| И., Старовицкий С | |||
| Н., Федоров В | |||
| А | |||
| Способ управления автоматизированной шахтной крепью | |||
| - Автоматизация горных машин (сборник) | |||
| М., «Недра, 1976, с | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
