4ь
sl
СО 0
vj
о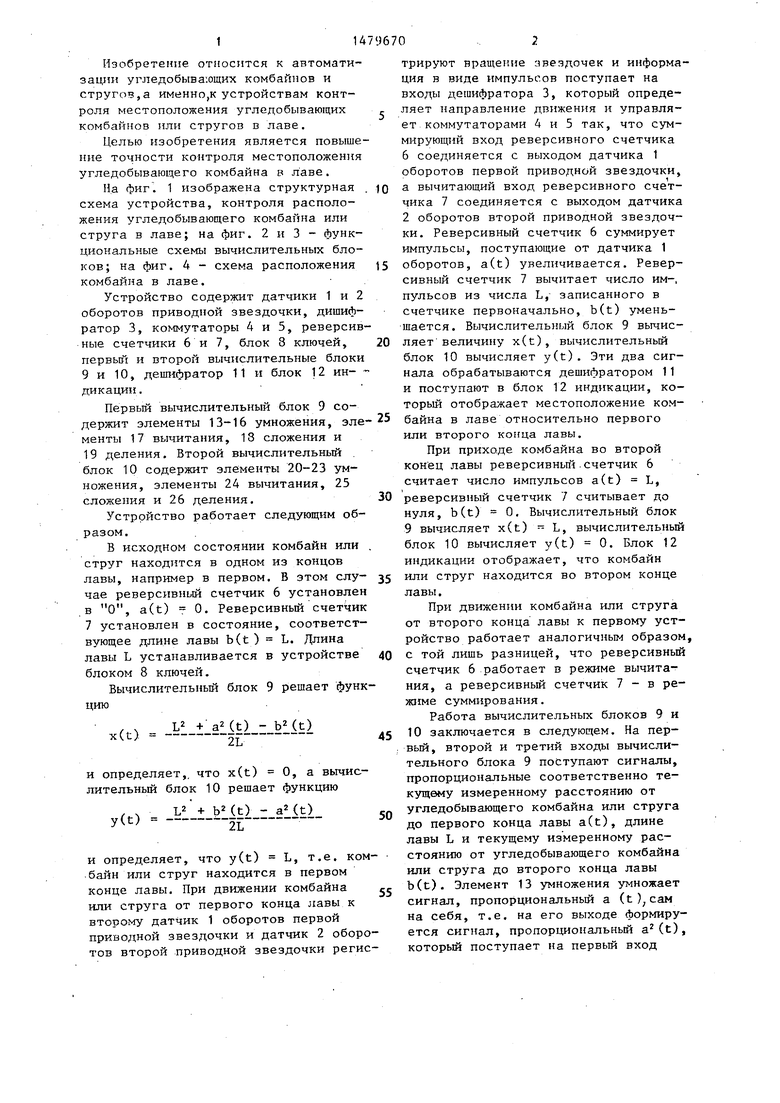
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Система автоматического управления струговой установкой | 1977 |
|
SU1002602A1 |
| Способ автоматического управления выдвижкой секций базы угледобывающего агрегата и устройство для его осуществления | 1982 |
|
SU1052670A1 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ УГЛЕДОБЫВАЮЩИХ МАШИН | 1971 |
|
SU306259A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Устройство автоматического поддержания прямолинейности базы очистного агрегата | 1981 |
|
SU1010284A1 |
| Устройство для индикации работы транспортно-закладочной установки | 1980 |
|
SU909164A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Устройство для измерения пути | 1980 |
|
SU966598A1 |
| Устройство автоматического управления системой пылеподавления струговой установки | 1982 |
|
SU1092281A1 |
Изобретение касается автоматизации горной техники. Цель изобретения - повышение точности контроля местоположения угледобывающего комбайна в лаве. При движении комбайна от одного конца лавы к другому датчику 1, 2 оборотов первой и второй приводных звездочек передают в виде импульсов информацию о вращении звездочек на входы дешифратора 3 и коммутаторов 4 и 5. Дешифратор 3 определяет направление движения и управляет коммутаторами 4 и 5. Коммутаторы 4, 5 связаны с реверсивными счетчиками 6 и 7. Информация с выходов счетчиков 6 и 7 поступает на входы вычислительных блоков 9 и 10. Туда же поступает информация о длине лавы с выхода блока 8 ключей. Сигналы с выходов вычислительных блоков 9, 10 о местоположении комбайна поступают в дешифратор 11 и индицируются в блоке 12 индикации. 4 ил.
фиг.1
Изобретение относится к автоматизации угледобывающих комбайнов и стругов,а именно,к устройствам контроля местоположения угледобывающих комбайнов или стругов в лаве.
Целью изобретения является повышение точности контроля местоположения угледобывающего комбайна в лаве.
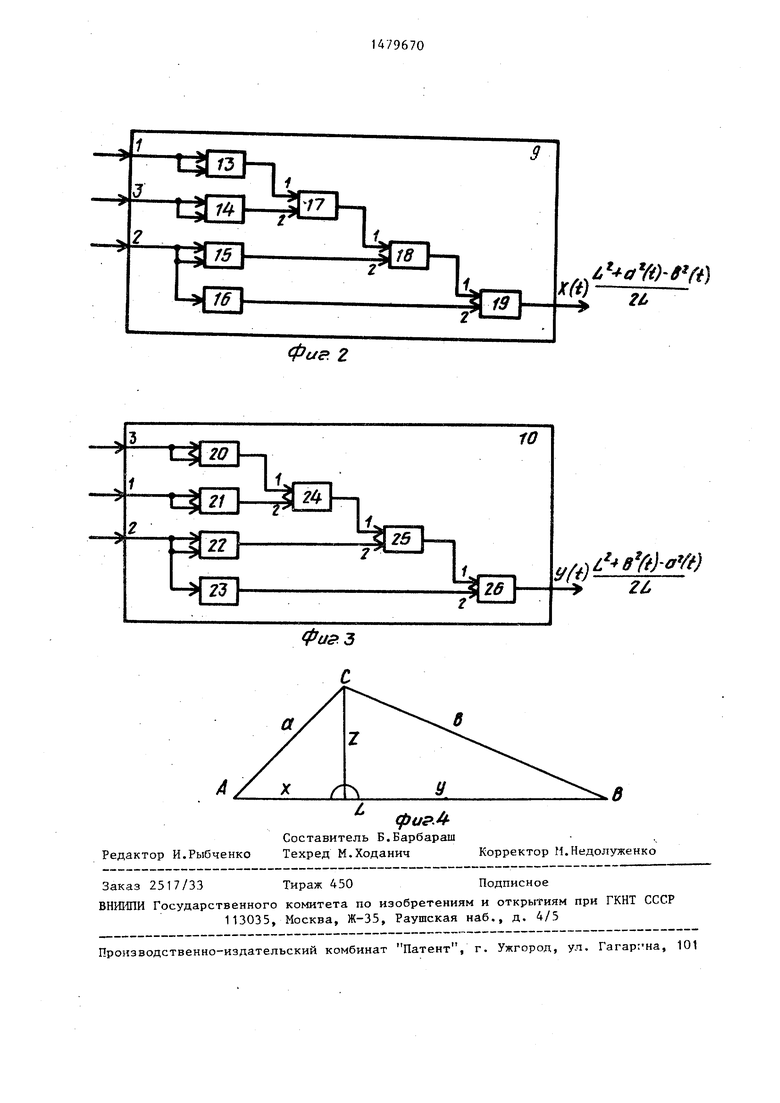
На фиг. 1 изображена структурная схема устройства, контроля расположения угледобывающего комбайна или струга в лаве; на фиг. 2 и 3 - функциональные схемы вычислительных блоков; на фиг. 4 - схема расположения комбайна в лаве.
Устройство содержит датчики 1 и 2 оборотов приводной звездочки, дишиф- ратор 3, коммутаторы 4 и 5, реверсивные счетчики 6 и 7, блок 8 ключей, первый и второй вычислительные блоки 9 и 10, дешифратор 11 и блок 12 ин- - дикации.
Первый вычислительный блок 9 сотрируют вращение звездочек и инфор ция в виде импульсов поступает на входы дешифратора 3, который опред г ляет направление движения и управл ет коммутаторами 4 и 5 так, что су мирующий вход реверсивного счетчик 6 соединяется с выходом датчика 1 оборотов первой приводной звездочк
Ю а вычитающий вход реверсивного сче чика 7 соединяется с выходом датчи 2 оборотов второй приводной звездо ки. Реверсивный счетчик 6 суммируе импульсы, поступающие от датчика 1
15 оборотов, a(t) увеличивается. Реве сивный счетчик 7 вычитает число им пульсов из числа L, записанного в счетчике первоначально, b(t) умень шается. Вычислительный блок 9 вычи
20 ляет величину x(t), вычислительный блок 10 вычисляет y(t). Эти два си нала обрабатываются дешифратором 1 и поступают в блок 12 индикации, к торый отображает местоположение ко
держит элементы 13-16 умножения, эле-25 байна в лаве относительно первого
менты 17 вычитания, 13 сложения и 19 деления. Второй вычислительный блок 10 содержит элементы 20-23 умножения, элементы 24 вычитания, 25 сложения и 26 деления.
Устройство работает следующим образом.
В исходном состоянии комбайн или . струг находится в одном из концов лавы, например в первом. В этом случае реверсивный счетчик 6 установлен в О, a(t) 0. Реверсивный счетчик 7 установлен в состояние, соответствующее длине лавы b(t ) L. Длина лавы L устанавливается в устройстве блоком 8 ключей.
Вычислительный блок 9 решает функцию
L2 (t) - b2(t) 2L
x(t)
и определяет, что x(t) 0, а вычислительный блок 10 решает функцию
L2
+ b4t)
2L
(t)
и определяет, что y(t) L, т.е. комбайн или струг находится в первом конце лавы. При движении комбайна « или струга от первого конца лавы к второму датчик 1 оборотов первой приводной звездочки и датчик 2 оборотов второй приводной звездочки регистрируют вращение звездочек и информация в виде импульсов поступает на входы дешифратора 3, который опреде- ляет направление движения и управляет коммутаторами 4 и 5 так, что суммирующий вход реверсивного счетчика 6 соединяется с выходом датчика 1 оборотов первой приводной звездочки,
а вычитающий вход реверсивного счетчика 7 соединяется с выходом датчика 2 оборотов второй приводной звездочки. Реверсивный счетчик 6 суммирует импульсы, поступающие от датчика 1
оборотов, a(t) увеличивается. Реверсивный счетчик 7 вычитает число им-, пульсов из числа L, записанного в счетчике первоначально, b(t) уменьшается. Вычислительный блок 9 вычис0 ляет величину x(t), вычислительный блок 10 вычисляет y(t). Эти два сигнала обрабатываются дешифратором 11 и поступают в блок 12 индикации, который отображает местоположение ком0
5
0
5
0
или второго конца лавы.
При приходе комбайна во второй конец лавы реверсивный счетчик 6 считает число импульсов a(t) L, реверсивный счетчик 7 считывает до нуля, b(t) 0. Вычислительный блок
9вычисляет x(t) - L, вычислительный блок 10 вычисляет y(t) 0. Блок 12 индикации отображает, что комбайн или струг находится во втором конце лавы.
При движении комбайна или струга от второго конца лавы к первому устройство работает аналогичным образом, с той лишь разницей, что реверсивный счетчик 6 работает в режиме вычитания, а реверсивный счетчик 7 - в режиме суммирования.
Работа вычислительных блоков 9 и
10заключается в следующем. На первый, второй и третий входы вычислительного блока 9 поступают сигналы, пропорциональные соответственно текущему измеренному расстоянию от угледобывающего комбайна или струга до первого конца лавы a(t), длине лавы L и текущему измеренному расстоянию от угледобывающего комбайна или струга до второго конца лавы b(t). Элемент 13 умножения умножает сигнал, пропорциональный a (t);can на себя, т.е. на его выходе формируется сигнал, пропорциональный аг(О, который поступает на первый вход
314
элемента 17 вычитания. Элемент 14 умножения умножает сигнал, пропорциональный b(t), сам на себя, т.е. на его выходе формируется сигнал, пропорциональный b2 (t) , который поступает на второй вход элемента 17 вычитания . Последний вычитает из сигнала первого входа сигнал второго входа, т.е. на его выходе формируется сигнал, пропорциональный a2(t) - - bz(t), который поступает на первый вход элемента 18 сложения. Элемент 15 умножения умножает сигнал, пропорциональный L, сам на себя, т.е. на его выходе формируется сигнал, пропорциональный L2, который поступает на второй вход элемента 18 сложения, который суммирует входные сигналы и на выходе формирует сигнал пропорциональный L2 + a2(t) - b2(t), который поступает на первый вход элемента 19 деления. Элемент 16 умножения на постоянную величину умножает сигнал, пропорциональный L, на два, т.е. на его выходе формируется сигнал, пропорциональный 2L, который поступает на второй вход элемента 19 деления. Последний делит сигнал первого входа на сигнал второго входа и формирует на своем выходе сигнал, пропорциональный
L2 + a2(t) - b2(t)
,
т.е. на выходе вычислительного блока 9 формируется сигнал, пропорциональный
x(t)
L2 (t) b4t)
2L
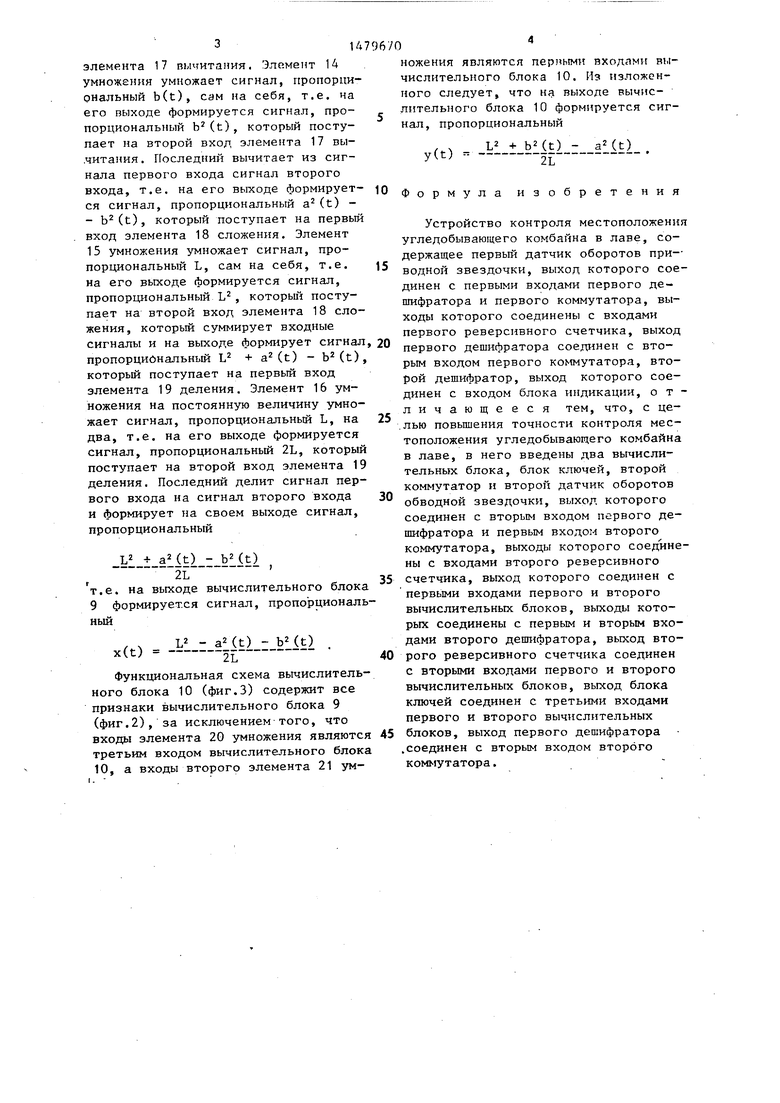
Функциональная схема вычислительного блока 10 (фиг.З) содержит все признаки вычислительного блока 9 (фиг.2), за исключением того, что входы элемента 20 умножения являются третьим входом вычислительного блока 10, а входы второго элемента 21 ум06/0
ножения являются перлмми входами вычислительного блока 10. Из изложенного следует, что на выходе вычислительного блока 10 формируется сигнал, пропорциональный
Ч. (О (t) 2L
y(t) 10 Формула изобретения
0
5
0
5
0
5
Устройство контроля местоположения угледобывающего комбайна в лаве, содержащее первый датчик оборотов приводной звездочки, выход которого соединен с первыми входами первого дешифратора и первого коммутатора, выходы которого соединены с входами первого реверсивного счетчика, выход первого дешифратора соединен с вторым входом первого коммутатора, второй дешифратор, выход которого соединен с входом блока индикации, отличающееся тем, что, с целью повышения точности контроля местоположения угледобывающего комбайна в лаве, в него введены два вычислительных блока, блок ключей, второй коммутатор и второй датчик оборотов обводной звездочки, выход которого соединен с вторым входом первого дешифратора и первым входом второго коммутатора, выходы которого соединены с входами второго реверсивного счетчика, выход которого соединен с первыми входами первого и второго вычислительных блоков, выходы которых соединены с первым и вторым входами второго дешифратора, выход второго реверсивного счетчика соединен с вторыми входами первого и второго вычислительных блоков, выход блока ключей соединен с третьими входами первого и второго вычислительных блоков, выход первого дешифратора .соединен с вторым входом второго коммутатора.
фиа Z
Редактор И.Рыбченко
фир.4Составитель Б.Барбараш
Техред М.Ходанич Корректор М.Недолуженко
)
26
uQLl+9 f №)
26
| Голубчиков A.M | |||
| и др | |||
| Аппаратура автоматизации струговых установок | |||
| Обзор | |||
| П.: ЩШИУголь, 1981, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство контроля местонахождения струга в лаве | 1975 |
|
SU583297A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
