Изобретение относится к машиностроению, преимущественно к робототехнике, и предназначено для автоматизации технологических процессов снятия, переноса и установки деталей на станки для дальнейшей их обработки.
Цель изобретения - снижение динамических нагрузок путем уменьшения масс подвижных частей конструкции.
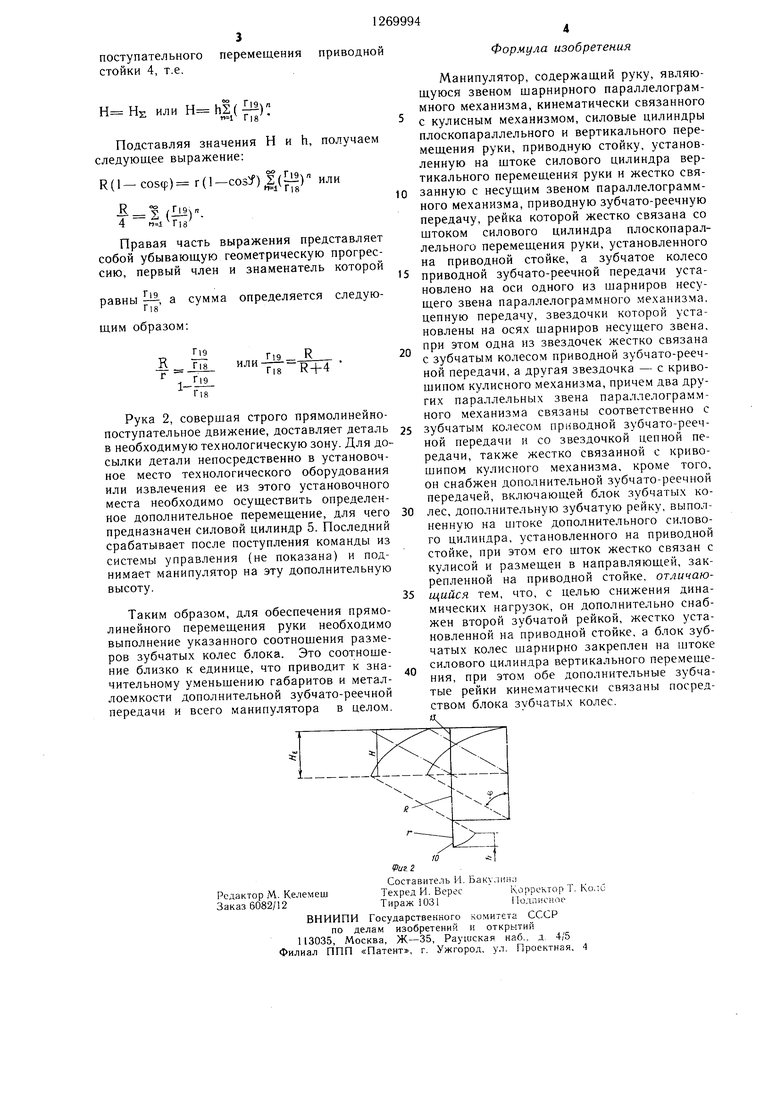
На фиг. 1 изображена кинематическая схема манипулятора; на фиг, 2 - его расчетная схема.
Манипулятор содержит силовой цилиндр 1 плоскопараллельного перемеш,ения руки 2, являющейся звеном шарнирного параллелограммного механизма, зубчато-реечную передачу, рейка 3 которой жестко связана со штоком силового цилиндра 1 плоскопараллельного перемещения руки, установленного на приводной стойке 4. Последняя смонтирована на штоке силового цилиндра 5 вертикального перемещения руки. Приводная стойка 4 жестко связана с несущим звеном б параллелограммного механизма. Зубчатое колесо 7 приводной зубчато-реечной передачи установлено на оси одного из шарнирнов несущего звена 6 параллелограммного механизма.
Манипулятор содержит цепную передачу, звездочки которой установлены на осях шарниров несущего звена 6, при этом одна звездочка 8 жестко соединена с зубчатым колесом 7 приводной зубчато-реечной передачи, а другая звездочка 9 жестко связана с кривошипом 10 кулисного механизма. Между собой звездочки 8 и 9 соединены цепью 11. Звено 12 параллелограммного механизма неподвижно соединено с зубчатым колесом 7 приводной зубчато-реечной передачи, а звено 13 параллелограммного механизма - со звездочкой 9 цепной передачи. Ползун 14 установлен в прямолинейной кулисе 15, причем кривошип 10 смонтирован в ползуне с регулируемым радиусом. Манипулятор имеет дополнительную зубчато-реечную передачу, первая дополнительная рейка 16 которой жестко связана с одной стороны с кулисой 15, а с другой - со штоком дополнительного силового цилиндра 17 (уравновешивающего механизма}. Корпус дополнительного силового цилиндра 17 неподвижно соединен с приводной стойкой 4.
Дополнительная зубчато-реечная передача имеет блок зубчатых колес, шарнирно установленный на штоке силового цилиндра 5 вертикального перемещения руки.
Кулиса 15 посредством рейки 16 соединена с зубчатым колесом 18 блока колес, а зубчатое колесо 19 этого блока находится в зацеплении с второй дополнительной рейкой 20, неподвижно соединенной с приводной стойкой 4.
Манипулятор работает следующим образом.
В исходном положении по команде из системы управления (не показана) рабочая среда, например сжатый воздух, подается в поршневую полость силового цилиндра 1 плоскопараллельного движения руки 2, а его щток, жестко связанный с рейкой 3, поворачивает зубчатое колесо 7 на определенный угол ф. На этот же угол поворачиваются звенья 12 и 13 параллелограммного механизма, звездочки 8 и 9 и кривошип 10 кулисного механизма, при этом наличие цепной передачи предотвращает снижение точности позиционирования в «мертвой точке. Рука 2 совершает плоскопараллельное движение, величина вертикальной составляюшей определяется по формуле
Н R(I-созф),
где R - длина звена 13 параллелограммного механиза.
При повороте кривошипа 10 на угол ф кулиса 15 совершает подъем на высоту h г(1-созф), где г - длина кривошипа 10.
Движение кулисы 15 через первую дополнительную рейку 16 передается зубчатому колесу 18, шарнирно закрепленному на штоке 5 цилиндра вертикального перемещения. Второе колесо блока колес 19, поворачиваясь на тот же угол и взаимодействуя с дополнительной рейкой 20, поднимает шарнирный параллелограммный механизм на высоту
Г19
HI Г|8
где Г18 и Г19 - радиусы соответствующих колес.
Но подъем параллелограммного механизма на HI вызовет дополнительное перемещение кулисы, которая в свою очередь вновь через блок зубчатых колес 19 и 18, шарнирно установленных на штоке, передает перемещение на приводную стойку 4. При этом шарнирный параллелограмм поднимается на высоту
Г|9
HI ИЛКН2
h(--)
Mls fiS
Суммарное поступательное перемещение приводной стойки 4 вместе с шарнирным параллелограммным механизмом и кулисой .при первоначальном повороте зубчатого колеса 7 на угол ф, складываясь из п таких перемещений, представляет собой выражение:
Ну hS (-)
Для обеспечения технологических операций в труднодоступных узких зонах и рука 2, и деталь, установленная в захватах руки, совершают строго прямолинейное поступательное перемещение, что достигается равенством вертикальной составляющей плоскопараллельного движения руки и суммарного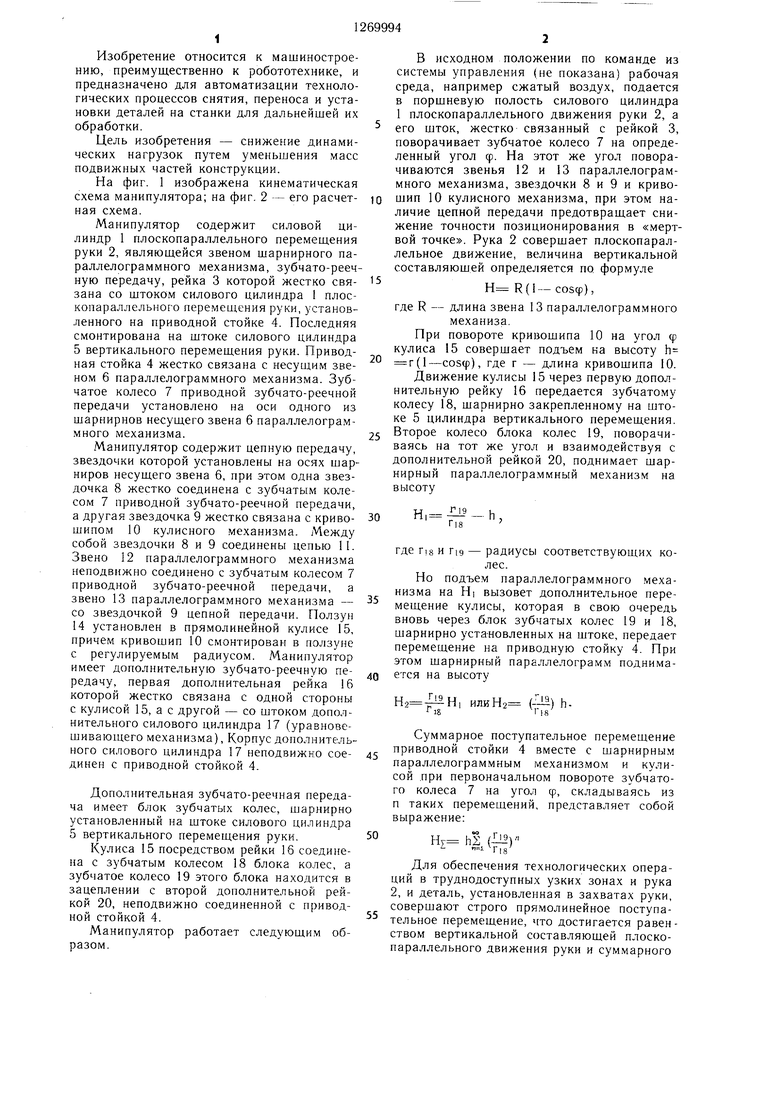
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1186464A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Двухкомпонентный низкочастотный вибростенд | 1981 |
|
SU1013795A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Захват | 1977 |
|
SU667396A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1981 |
|
SU1000267A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
Изобретение относится к области машиностроения и предназначено для автоматизации технологических процессов снятия, переноса и установки деталей на станки для дальнейшей их обработки. Цель изобретения состоит в снижении динамических нагрузок путем уменьшения массы подвижных частей конструкции. Манипулятор содержит вторую зубчатую рейку 20, жестко закрепленную на приводной стойке 4. Блок зубчатых колес 18 и 19 шарнирно установлен на штоке силового цилиндра 5 вертикального перемеш,ения руки. Движение кулисы 15 через первую дополнительную рейку 16 передается зубчатому колесу 18. Зубчатое колесо 19, поворачиваясь на тот же угол и взаимодействуя с второй дополнительной рейкой 20, поднимает шарнирный параллелограммный механизм на нужную высоту. 2 ил. (риг.1
| Манипулятор | 1983 |
|
SU1186464A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
