Изобретение относится к машиностроению, преимущественно к робототехнике, и предназначено для автоматизации технологических процессов снятия, переноса деталей и установки их на станки для дальнейшей обработки.
Цель изобретения - расширение технологических возможностей манипулятора за счет максимального использования всей длины руки манипулятора и улучшения динамических характеристик уравновешивания механической системы манипулятора
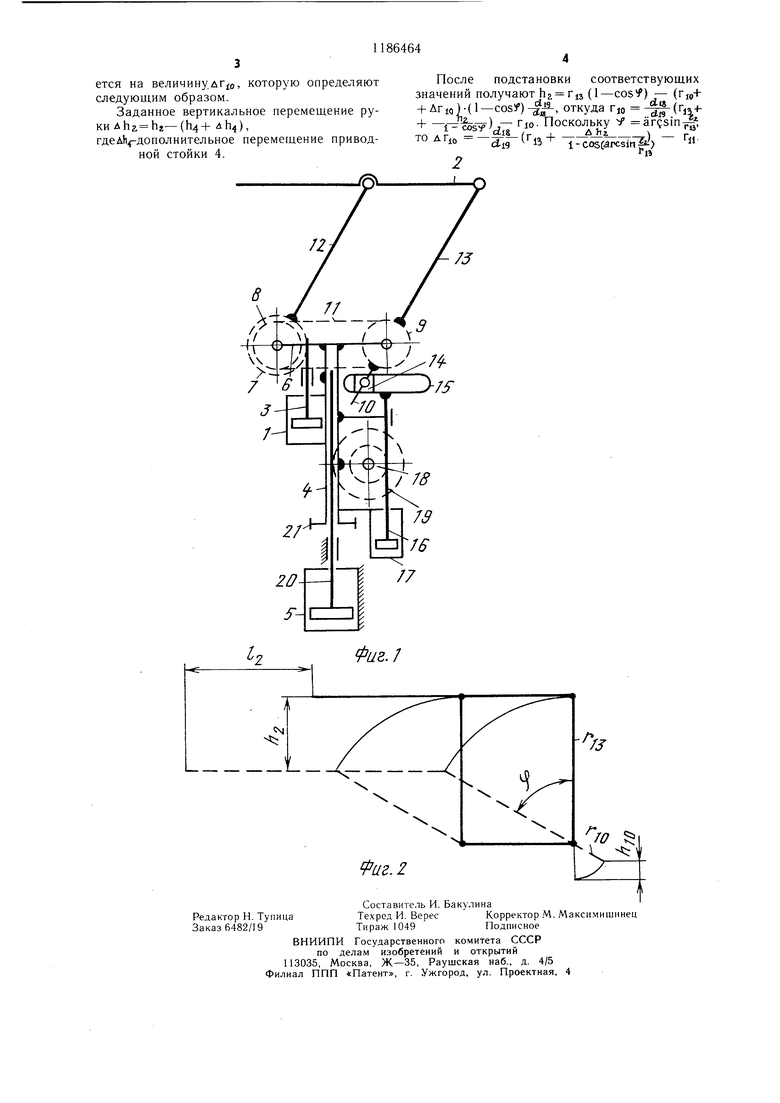
На фиг. 1 изображен манипулятор, кинематическая схема; на фиг. 2 - то же, расчетная схема.
Манипулятор содержит силовой цилиндр 1 плоскопараллельного перемещения руки 2, являющейся звеном шарнирного параллелограммного механизма, зубчато-реечную передачу, рейка 3 которой жестко связана с штоком силового цилиндра 1 плоскопараллельного перемещения руки, установленного на приводной стойке 4. При этом приводная стойка 4 установлена на штоке силового цилиндра 5 вертикального перемещения руки. Приводная стойка 4 жестко связана с несущим звеном 6 параллелограммного механизма. Зубчатое колесо 7 приводной зубчато-реечной передачи установлено на оси одного из шарниров несущего звена 6 параллелограммного механизма.
Манипулятор содержит цепную передачу, звездочки которой установлены на осях шарниров несущего звена 6, при этом одна звездочка 8 жестко связана с зубчатым коле сом 7 приводной зубчато-реечной передачи, а другая звездочка 9 жестко связана с кривошипом 10 кулисного механизма. Между собой звездочки 8 и 9 связаны цепью 11. Звено 12 параллелограммного механизма жестко связано с зубчатым колесом 7 приводной зубчато-реечной передачи, а звено 13 параллелограммного механизма - с звездочкой 9 цепной передачи. Ползун 14 установлен в прямолинейной кулисе 15, причем кривошип 10 установлен в ползуне с регулируемым радиусом. Манипулятор имеет дополнительную зубчато-реечную передачу, рейка 16 которой жестко связана с кулисой 15 с одной стороны и с штоком цилиндра 17 уравновешивающего механизма.
Корпус цилиндра 17 урвановешивающего механизма жестко связан с подвижной стойкой 4.
Дополнительная зубчато-реечная передача имеет блок зубчатых колес, шарнирно установленных на подвижной стойке 4. Кулиса 15 посредством рейки 16 соединена с зубчатым колесом 18 блока зубчатых колес, а зубчатое колесо 19 этого блока находится в зацеплении с рейкой 20, жестко связанной с штоком силового цилиндра 5 вертикального перемещения руки. На подвижной стойке 4 жестко установлена шестерня 21 привода поворота (не показан).
Манипулятор работает следующим образом.
В исходном положении по команде из системы управления (не показана) рабочая среда, например сжатый воздух, подается в порщневую полость силового цилиндра 1 плоскопараллельного перемещения руки 2, и его шток, жестко связанный с рейкой 3, поворачивает зубчатое колесо 7 на определенный угол f . На этот же угол поворачиБаются звенья 12 и 13 параллелограммного механизма, звездочки 8 и 9 и кривошип 10 кулисного механизма, при этом наличие цепной передачи предотвращает снижение точности позиционирования в мертвой точке. Рука 2 совершает плоскопараллельное движение, величина вертикальной составляющей которого Нг Г(з( 1 -cosy), где г - длина звена 13 параллелограммного механизма.
При повороте кривошипа 10 на угол f кулиса 15 совершает поступательное пере0 мещение, величина которого rio(l - созУ), где JTjo - длина кривошипа 10.
Движение кулисы 15 через рейку 6 передается зубчатому колесу 18 блока зубчатых колес, при этом зубчатое колесо 19 блока зубчатых колес перекатывается по рейке 20, жестко связанной с штоком силового цилиндра 5 вертикального перемещения руки 2, поднимает подвижную стойку 4, которая поджимает параллелограммный механизм. Величина этого перемещения определяется соотноQ шением.
, ..,
гдес1 иав-диаметры делительных окружностей соответствующих зубчатых колес блока.
Для обеспечения технологических операций в труднодоступных узких зонах и рука 2, и деталь, установленная в захватах руки, совершают строго прямолинейное поступательное перемещение, что достигается равенством вертикальной составляющей плоскопараллельного движения руки 2 и поступательного перемещения приводной стойки 4, т.е. Ьг, Ьи или Гл5 (1-cosy)(l - cosy)-|,откудаr,,.
Рука 2, совершая строго прямолинейное поступательное движение, доставляет деталь 5 в необходимую технологическую зону. Для досылки детали непосредственно в установочное место технологического оборудования или извлечения ее из этого установочного места необходимо осуществить определенное дополнительное перемещение, для чего предП г-Т-ГU
назначен силовой цилиндр 5. Последний срабатывает после поступления команды из системы управления (не показана) и поднимает или опускает манипулятор на эту дополнительную высоту.
5 Для получения одним ходом руки 2 заданного вертикального ее перемещения при заданном горизонтальном кривошип 10 кулисного механизма выполнен с регулируемым радиусом, при этом его радиус изменя
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1269994A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Двухкомпонентный низкочастотный вибростенд | 1981 |
|
SU1013795A1 |
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Устройство для транспортировки листового материала вдоль линии прессов | 1975 |
|
SU555951A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Привод манипулятора | 1985 |
|
SU1293018A1 |
1. МАНИПУЛЯТОР, содержащий руку, являющуюся звеном щарнирного параллелограммного механизма, кинематически связанного с кулисным механизмом, и силовые цилиндры плоскопараллельного и вертикального перемещений руки, отличающийся тем, что, с целью улучщения динамических характеристик и расщирения технологических возможностей, он снабжен приводной стойкой, установленной на щтоке силового цилиндра вертикального перемещения руки и жестко связанной с несущим звеном щарнирного параллелограммного механизма, приводной зубчато-реечной передачей, рейка которой жестко связана с штоком силового цилиндра плоскопараллельного перемещения руки, установленного на приводной стойке, а зубчатое колесо приводной зубчато-реечной передачи установлено на оси одного из шарниров несущего звена щарнирного параллелограммного механизма и цепной передачей, звездочки которой установлены на осях щарниров несущего звена, при этом одна из звездочек жестко связана с зубчатым колесом приводной зубчато-реечной передачи, а другая - с кривощипом кулисного механизма, при этом два других параллельных звена щарнирного параллелограммного механизма связаны с зубчатым колесом приводной зубчато-реечной передачи и с звездочкой цепной передачи, жестко связанной с кривощипом кулисного механизма, соответственно, дополнительной зубчато-реечной передачей, рейка которой установлена в направляющей, жестко связанiS ной с подвижной стойкой и кинематически (Л связанной через блок зубчатых колес, установленных на приводной стойке с рейкой щтока силового цилиндра вертикального перемещения руки, причем рейка дополнительной зубчато-реечной передачи жестко соединена с кулисным механизмом. 2. Манипулятор по п. 1, отличающийся тем, что, он снабжен управляющим механизмом, выполненным в виде цилиндра, кор00 Од пус которого жестко связан с подвижной стойкой, а шток - с кулисным механизмом. 4: О5 
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
