у
т
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| Устройство для импульсно-фазового управления преобразователем | 1983 |
|
SU1094127A1 |
| СПОСОБ РАДИОЛОКАЦИИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ НЕПРЕРЫВНОГО ЗОНДИРУЮЩЕГО СИГНАЛА | 2002 |
|
RU2241241C2 |
| АДАПТИВНОЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2400910C1 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| Фильтр для систем автоматического регулирования | 1982 |
|
SU1016770A1 |
| Устройство для управления инвертором напряжения | 1984 |
|
SU1319207A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| Дифференцирующее устройство | 1978 |
|
SU729594A1 |
| Устройство подавления узкополосных помех | 1983 |
|
SU1100734A1 |

НЕЛИНЕЙНЫЙ ФИЛЬТР, содержащий последовательно соединенные дифференцирующий фильтр, вход которого является входом нелинейного фильтра, нелинейный блок, восстанавливающий фильтр, выход которого является выходом нелинейного фильтра, отличающийся тем, что, с целью расширения функциональных возможностей нелинейного фильтра за счет подавления сигналов описываемых кусочно-целыми функциями, нелинейный блок выполнен в виде последовательно соединеньЬс сумматора, блока ограничения и интергратора, выход которого соединен с входом сумматора.
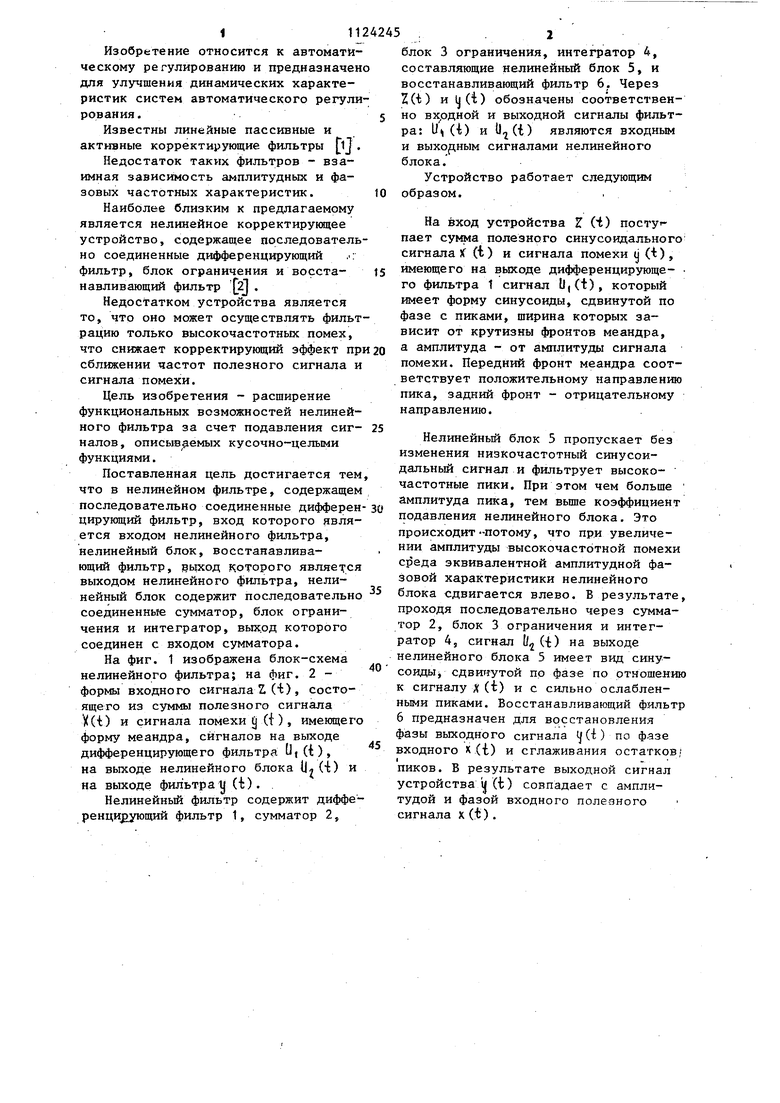
Фuг.f Изобрьтение относится к автоматическому регулированию и предназначен для улучшения динамических характеристик систем автоматического регули рования. Известны линейные пассивные и активные корректирующие фильтры lj . Недостаток таких фильтров - взаимная зависимость амплитудных и фазовых частотных характеристик. Наиболее близким к предлагаемому является нелинейное корректируницее устройство, содержащее пс следователь но соединенные дифференцирующий .: фильтр, блок ограничения и восстанавливающий фильтр 2j . Недостатком устройства является то, что оно может осуществлять фильт рацию только высокочастотных помех, что снижает корректирующий эффект пр сближении частот полезного сигнала и сигнала помехи. Цель изобретения - расширение функциональных возможностей нелинейного фильтра за счет подавления сигналов, описываемых кусочно-целыми функциями. Поставленная цель достигается тем что в нелинейном фильтре, содержащем последовательно соединенные дифферен цирующий фильтр, вход которого является входом нелинейного фильтра, нелинейный блок, восстанавливающий фильтр, вьрсод которого является выходом нелинейного фильтра, нелинейный блок содержит последовательно соединеннью сумматор, блок ограничения и интегратор, выход которого соединен с входом сумматора. На фиг. 1 изображена блок-схема нелинейного фильтра; на фиг. 2 формы входного сигнала Z(i), состоящего из суммы полезного сигнала Vet) и сигнала помехи Cj (О, имеющего форму меандра, сигналов на выходе дифференцирующего фильтра U,(t), на выходе нелинейного блока ) и на выходе фильтр а tj (t). Нелинейный фильтр содержит дифференцидующий фильтр 1, сумматор 2, блок 3 ограничения, интегратор 4, составляющие нелинейный блок 5, и восстанавливающий фильтр 6. Через Z(i:) и1|(1) обозначены соответственно вх одной и выходной сигналы фильтра: и ({) и l)(t) являются входным и выхорным сигналами нелинейного блока. Устройство работает следующим образом.. На вход устройства (i) поступает сумма полезного синусоидального сигнала )f (t) и сигнала помехи у (t), имеющего на выходе дифференцирующе- го фильтра 1 сигнал U,(t), который имеет форму синусоиды, сдвинутой по фазе с пиками, ширина которых зависит от крутизны фронтов меандра, а амплитуда - от амплитуды сигнала помехи. Передний фронт меандра соответствует положительному направлению пика, задний фронт - отрицательному направлению. Нелинейный блок 5 пропускает без изменения низкочастотный синусоидальный сигнал и фильтрует высокочастотные пики. При этом чем больше амплитуда пика, тем вьш1е коэффициент подавления нелинейного блока. Это происходит-потому, что пр.и увеличении амплитуды высокочастотной помехи среда эквивалентной амплитудной фазовой характеристики нелинейного блока сдвигается влево. В результате, проходя последовательно через сумматор 2, блок 3 ограничения и интегратор 4, сигнал (/(i) на выходе нелинейного блока 5 имеет вид синусоиды сдвинутой по фазе по отношению к сигналу л(t) и с сильно ослабленными пиками. Восстанавливающий фильтр 6 предназначен для восстановления фазы выходного сигнала lf(-l;) по фазе входного X(t) и сглаживания остатков; I- пиков, в результате выходной сигнал устройства ij (t) совпадает с амплитудой и фазой входного поле-зного сигнала X(t).
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Современная теория фильтров и их проектирование | |||
| Под ред | |||
| Г | |||
| Темеша, С Митра | |||
| М., Мир, 1977, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Нелинейные корректирующие, устройства в системе автоматического управления | |||
| Под ред | |||
| Ю.И.Топчеева | |||
| М., Машиностроение, 1971, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
